Выбор расположения полюсов проектируемой системы
В предыдущих параграфах текущего раздела мы показали, каким путем можно выбрать коэффициент обратной связи по состоянию, если определено желаемое расположение полюсов замкнутой системы. Однако при этом возникает вопрос классической теории управления: как найти расположение полюсов, чтобы добиться желаемых свойств для проектируемой системы, другими словами, как выбрать желаемый характеристический многочлен замкнутой системы. Один из возможных путей решения этой проблемы: использовать временные показатели качества (tр, tн,  )
)  для определения доминирующих полюсов
для определения доминирующих полюсов  желаемой системы – корней уравнения второго порядка
желаемой системы – корней уравнения второго порядка
 .
.
Затем расположить остальные полюсы так, чтобы они были «намного быстрее», чем доминирующие полюсы. Как пример, можно их выбрать из условия  , т.е., чтобы их вещественная часть была в 3-4 раза больше, чем вещественная часть доминирующих полюсов
, т.е., чтобы их вещественная часть была в 3-4 раза больше, чем вещественная часть доминирующих полюсов  . При этом надо осторожно относиться к смещению этих полюсов слишком далеко влево от мнимой оси, т.к. оно приведет к большому по величине управлению. Это первый путь.
. При этом надо осторожно относиться к смещению этих полюсов слишком далеко влево от мнимой оси, т.к. оно приведет к большому по величине управлению. Это первый путь.
Второй возможный путь выбрать полюсы замкнутой системы, так чтобы система реагировала на задающее воздействие аналогично некоторой желаемой системе, свойства которой близки к тем, что мы ожидаем от проектируемой системы. Другими словами, установить полюсы проектируемой системы равными полюсам желаемой системы (прототипа, прообраза). В качестве последней можно, например, выбрать систему k-го порядка с ПФ
 ,
,
где  многочлены Бесселя. Переходная характеристика системы
многочлены Бесселя. Переходная характеристика системы  для различных значений k и расположение корней нормированного многочлена Бесселя, соответствующих времени переходного процесса в 1с., представлены на рис. ниже.
для различных значений k и расположение корней нормированного многочлена Бесселя, соответствующих времени переходного процесса в 1с., представлены на рис. ниже.
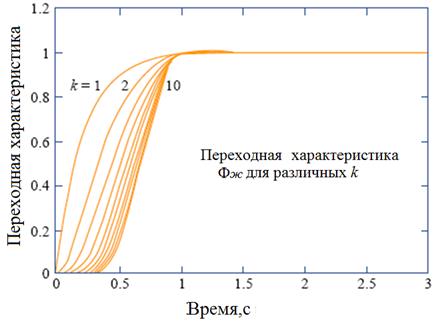
Все многочлены масштабированы так, чтобы длительность переходного процесса была равна 1с. Если поделить все полюсы на tр, то можно изменить длительность переходного процесса до желаемого значения tр.
Процедура проектирования для системы n-го порядка:
− Определить желаемое время переходного процесса tр;
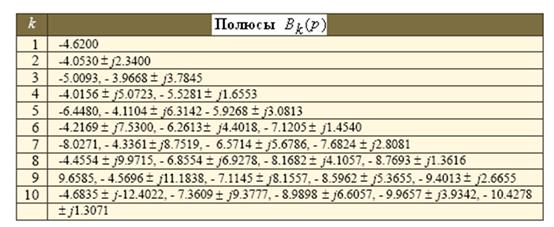
− Выбрать порядок многочлена k=n из таблицы;
− Разделить значения всех полюсов  на tр;
на tр;
− Сформировать желаемый характеристический многочлен  и использовать процедуру acker/place;
и использовать процедуру acker/place;
− Осуществить симуляцию спроектированной системы с целью оценить ее качество и максимальную величину управления.
Пример. Пусть объект управления описывается уравнением состояния с матрицами
так что k =n =3. Пусть требуется tр =2с. Тогда из таблицы находим 3 полюса:
-5.0093/2=-2.5047; (-3.9668  j3.7845)/2 = -1.9834 j1.8922.
j3.7845)/2 = -1.9834 j1.8922.
Используем эти полюсы для формирования и затем определяем векторный коэффициент  обратной связи по состоянию, применяя процедуру acker.
обратной связи по состоянию, применяя процедуру acker.
Метод, связанный с многочленами Бесселя, дает неплохие результаты, однако переходная характеристика является слишком медленной, о чем свидетельствует небольшое перерегулирование, получаемое при его использовании.
Дата добавления: 2015-08-14; просмотров: 1132;