Замкнутые системы с наблюдателями (Системы управления, основанные на модели).
Предположим, что ОУ с одним входом и одним выходом (l=r=1), описываемый уравнениями
 (1)
(1)
 , (2)
, (2)
полностью управляем и наблюдаем.
Пусть для этого ОУ мы нашли такое управление (такой закон управления с обратной связью по состоянию)
 , (3)
, (3)
где  - задающее воздействие, а
- задающее воздействие, а  - векторный коэффициент ОС по состоянию, при котором полюса
- векторный коэффициент ОС по состоянию, при котором полюса  , другими словами, корни характеристического уравнения замкнутой системы с обратной связью по состоянию
, другими словами, корни характеристического уравнения замкнутой системы с обратной связью по состоянию

имеют фиксированное расположение  , удовлетворяющее требованиям, предъявляемым к проектированной системе, то есть мы нашли такой вектор , который обеспечивает равенство многочленов проектируемой и желаемой систем,
, удовлетворяющее требованиям, предъявляемым к проектированной системе, то есть мы нашли такой вектор , который обеспечивает равенство многочленов проектируемой и желаемой систем,  .
.
Но вектор  неизмерим!
неизмерим!
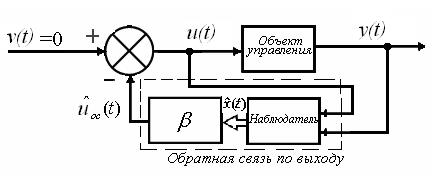
В этом случае кажется разумным использовать другой закон управления, а именно закон с обратной связью по выходу (по оценке состояния), получаемый из (3) путем замены на оценку вектора состояния  :
:
 , (4)
, (4)
где оценка состояния определяется с помощью наблюдателя, описываемого уравнением
 . (5)
. (5)
Здесь  - векторный параметр наблюдения.
- векторный параметр наблюдения.
Закон управления, определяемый уравнениями (4)и (5), совместно с уравнениями объекта (1) и (2) формирует замкнутую систему с наблюдателем (систему управления, основанную на модели). Последнее название связано с тем обстоятельством, что наблюдатель включает в себя модель объекта управления.
Упрощенная операционная структурная схема такой системы представлена на рисунке ниже.
Однако естественно возникают вопросы. Как замена в законе управления (3) на повлияет на свойства системы? Каково расположение полюсов замкнутой системы с наблюдателем?
Для ответа на эти вопросы нужно найти уравнение состояния полученной замкнутой системы с наблюдателем. С этой целью подставим (4) в уравнение состояния объекта  (1). При этом находим
(1). При этом находим
 . (6)
. (6)
Дата добавления: 2015-08-14; просмотров: 1275;