Определение скорости и ускорения точки при координатном способе задания ее движения
Если движение точки задано в координатной форме, то каждое параметрическое уравнений , взятое отдельно, описывает движение не самой точки, а ее проекции вдоль соответствующих осей. Пусть движение точки А в плоской системе координат задано уравнениями
х =f1 (t) и у =f2 (t).
Первое из уравнений определяет закон изменения абсциссы х движущейся точки (рис. 1.118), т. е. описывает движение по оси абсцисс точки Ах — проекции точки А на ось х. Второе уравнение определяет закон изменения ординаты у точки А, т. е. описывает движение по оси ординат ее проекции Ау на эту ось. Допустим, что в данный момент времени t точка А имеет скорость v , тогда Ах и А у — проекции точки на оси х и у—движутся по осям со скоростями vх и vу, модули которых равны проекциям скорости v на соответствующие оси (рис. 10.5). Следовательно, дифференцируя каждое из заданных уравнений, найдем модули скоростей vx и vу или, иначе говоря, проекции скорости v на оси координат.
Итак,
vx = dx/dt =f'(t) и vy = dy/dt = f'(t). (1.100)
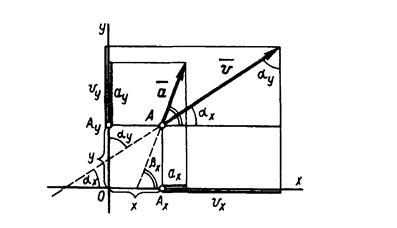
Рис 10.5
Если из начала и конца вектора v провести прямые, параллельные осям координат, то получим прямоугольный треугольник с гипотенузой v и катетами vх и vy . Отсюда модуль искомой скорости
 (1.101)
(1.101)
Направление скорости v, т. е. углы αх или αу , находим по одной из следующих формул:
Аналогично определяется и вектор ускорения а. Сначала находим его проекции на оси х и у:
ах = dvx/dt =f"(t) и ау = dvу /dt =f"(t), (1.105)
а затем модуль
 (1.106)
(1.106)
и направление, т. е. углы βх и βy (угол βу на рис. 1.118 не обозначен):
От координатного способа задания движения точки нетрудно перейти к естественному способу. Ранее мы рассмотрели , что, исключив время из уравнений движения х =f1 (t),
у =f2 (t), получаем уравнение траектории Ф (х, у) = 0. Уравнение движения S =f(t) по этой траектории получаем следующим образом. Так как v = dS / dt то dS = v dt; подставив сюда значение полученное из уравнений движения в
осях координат, и проинтегрировав:
 (1.108)
(1.108)
получим уравнения движения вида S =f(t).
Например, если движение точки задано уравнениями х = 3t2 и у = 4t2, то точка движется по прямолинейной траектории, уравнение которой 4x – 3y = 0.
Из заданных уравнений движения следует, что проекции скорости на оси координат
VX = 6t Vу = 8t ,
а модуль скорости в любой момент времени

Из уравнения (1.108)
Таким образом, точка движется прямолинейно по траектории 4х— 3y = 0 согласно уравнению S = 5t2.
ЛЕКЦИЯ 11
Дата добавления: 2015-08-08; просмотров: 2261;