Кинематика материальной точки.
Одним из основных понятий механики является понятие материальной точки, что означает тело, обладающее массой, размерами которого можно пренебречь при рассмотрении его движения. Движение материальной точки — простейшая задача механики, которая позволит рассмотреть более сложные типы движений.
Перемещение материальной точки происходит в пространстве и изменяется со временем. Реальное пространство трехмерно, и положение материальной точки в любой момент времени полностью определяется тремя числами — ее координатами в выбранной системе отсчета. Число независимых величин, задание которых необходимо для однозначного определения положения тела, называется числом его степеней свободы. В качестве системы координат выберем прямоугольную, или декартову, систему координат. Для описания движения точки, кроме системы координат, необходимо еще иметь устройство, с помощью которого можно измерять различные отрезки времени. Такое устройство назовем часами. Выбранная система координат и связанные с ней часы образуют систему отсчета.
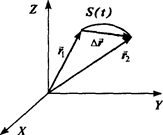 Декартовы координаты X,Y,Z определяют в пространстве радиус-вектор z, острие которого описывает при его изменении со временем траекторию материальной точки. Длина траектории точки представляет собой величину пройденного пути S(t). Путь S(t)— скалярная величина. Наряду с величиной пройденного пути, перемещение точки характеризуется направлением, в котором она движется. Разность двух радиус-векторов, взятых в различные моменты времени, образует вектор перемещения точки (рис.).
Декартовы координаты X,Y,Z определяют в пространстве радиус-вектор z, острие которого описывает при его изменении со временем траекторию материальной точки. Длина траектории точки представляет собой величину пройденного пути S(t). Путь S(t)— скалярная величина. Наряду с величиной пройденного пути, перемещение точки характеризуется направлением, в котором она движется. Разность двух радиус-векторов, взятых в различные моменты времени, образует вектор перемещения точки (рис.).
Для того чтобы характеризовать, как быстро меняется положение точки в пространстве, пользуются понятием скорости. Под средней скоростью движения по траектории за конечное время Dt понимают отношение пройденного за это время конечного пути DS ко времени:

 . (1.1)
. (1.1)
Скорость движения точки по траектории — скалярная величина. Наряду с ней можно говорить о средней скорости перемещения точки. Эта скорость — величина, направленная вдоль вектора перемещения,
 . (1.2)
. (1.2)
Если моменты времени t1, и t2 бесконечно близки, то время Dt бесконечно мало и в этом случае обозначается через dt. За время dt точка проходит бесконечно малое расстояние dS. Их отношение образует мгновенную скорость точки
 . (1.3)
. (1.3)
Производная радиус-вектора r по времени определяет мгновенную скорость перемещения точки.
 . (1.4)
. (1.4)
Поскольку перемещение совпадает с бесконечно малым элементом траектории dr = dS, то вектор скорости направлен по касательной к траектории, а его величина:
 . (1.5)
. (1.5)
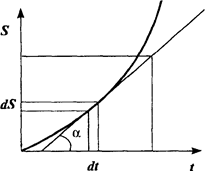 На рис. показана зависимость пройденного пути S от времени t. Вектор скорости v(t) направлен по касательной к кривой S(t) в момент времени t. Из рис. видно, что угол наклона касательной к оси t равен
На рис. показана зависимость пройденного пути S от времени t. Вектор скорости v(t) направлен по касательной к кривой S(t) в момент времени t. Из рис. видно, что угол наклона касательной к оси t равен
 .
.
Интегрируя выражение (1.5) в интервале времени от t0 до t, получим формулу, позволяющую вычислить путь, пройденный телом за время t-t0 если известна зависимость от времени его скорости v(t)
 . (1.6)
. (1.6)
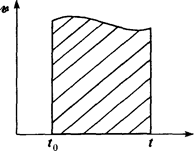 Геометрический смысл этой формулы ясен из рис. По определению интеграла пройденный путь представляет собой площадь, ограниченную кривой v =v(t) в интервале от t0 до t.В случае равномерного движения, когда скорость сохраняет свое постоянное значение во все время движения, v=const; отсюда следует выражение
Геометрический смысл этой формулы ясен из рис. По определению интеграла пройденный путь представляет собой площадь, ограниченную кривой v =v(t) в интервале от t0 до t.В случае равномерного движения, когда скорость сохраняет свое постоянное значение во все время движения, v=const; отсюда следует выражение
 , (1.7)
, (1.7)
где S0 ‑ путь, пройденный к начальному времени t0.
Производную скорости по времени, которая является второй производной по времени от радиус-вектора, называют ускорением точки:
 . (1.8)
. (1.8)
Вектор ускорения а направлен вдоль вектора приращения скорости dv. Пусть а = const. Этот важный и часто встречаемый случай носит название равноускоренного или равнозамедленного (в зависимости от знака величины а) движения. Проинтегрируем выражение (1.8) в пределах от t = 0 до t:
 (1.9)
(1.9)
 (1.10)
(1.10)
и используем следующие начальные условия:  .
.
Таким образом, при равноускоренном движении
 . (1.11)
. (1.11)
 В частности, при одномерном движении, например вдоль оси X,
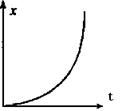
В частности, при одномерном движении, например вдоль оси X,  . Случай прямолинейного движения изображен на рис. При больших временах зависимость координаты от времени представляет собой параболу.
. Случай прямолинейного движения изображен на рис. При больших временах зависимость координаты от времени представляет собой параболу.
 В общем случае движение точки может быть криволинейным. Рассмотрим этот тип движения. Если траектория точки произвольная кривая, то скорость и ускорение точки при ее движении по этой кривой меняются по величине и направлению.
В общем случае движение точки может быть криволинейным. Рассмотрим этот тип движения. Если траектория точки произвольная кривая, то скорость и ускорение точки при ее движении по этой кривой меняются по величине и направлению.
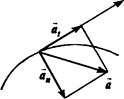
Выберем произвольную точку на траектории. Как всякий вектор, вектор ускорения можно представить в виде суммы его составляющих по двум взаимно перпендикулярным осям. В качестве одной из осей возьмем направление касательной в рассматриваемой точке траектории, тогда другой осью окажется направление нормали к кривой в этой же точке. Составляющая ускорения, направленная по касательной к траектории, носит название тангенциального ускорения at, а направленная ей перпендикулярно — нормального ускорения an.
Получим формулы, выражающие величины at, и an через характеристики движения. Для простоты рассмотрим вместо произвольной криволинейной траектории плоскую кривую. Окончательные формулы остаются справедливыми и в общем случае неплоской траектории.

 Благодаря ускорению скорость точки приобретает за время dt малое изменение dv. При этом тангенциальное ускорение, направленное по касательной к траектории, зависит только от величины скорости, но не от ее направления. Это изменение величины скорости равно dv. Поэтому тангенциальное ускорение может быть записано как производная по времени от величины скорости:
Благодаря ускорению скорость точки приобретает за время dt малое изменение dv. При этом тангенциальное ускорение, направленное по касательной к траектории, зависит только от величины скорости, но не от ее направления. Это изменение величины скорости равно dv. Поэтому тангенциальное ускорение может быть записано как производная по времени от величины скорости:
 . (1.12)
. (1.12)
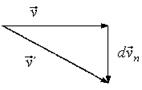
С другой стороны, изменение dvn, направленное перпендикулярно к v, характеризует только изменение направления вектора скорости, но не его величины. На рис. показано изменение вектора скорости, вызванное действием нормального ускорения. Как видно из рис. 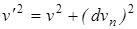 , и, таким образом, с точностью до величины второго порядка малости величина скорости остается неизменной v=v'.
, и, таким образом, с точностью до величины второго порядка малости величина скорости остается неизменной v=v'.
Найдем величину an. Проще всего это сделать, взяв наиболее простой случай криволинейного движения — равномерное движение по окружности. При этом at=0. Рассмотрим перемещение точки за время dt по дуге dS окружности радиуса R.
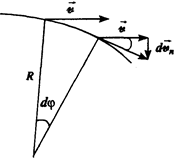 Скорости v и v' , как отмечалось, остаются равными по величине. Изображенные на рис. треугольники оказываются, таким образом, подобными (как равнобедренные с равными углами при вершинах). Из подобия треугольников следует
Скорости v и v' , как отмечалось, остаются равными по величине. Изображенные на рис. треугольники оказываются, таким образом, подобными (как равнобедренные с равными углами при вершинах). Из подобия треугольников следует  , откуда находим выражение для нормального ускорения:
, откуда находим выражение для нормального ускорения:
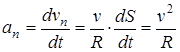 . (1.13)
. (1.13)
Формула для полного ускорения при криволинейном движении имеет вид:
 . (1.14)
. (1.14)
Подчеркнем, что соотношения (1.12), (1.13) и (1.14) справедливы для всякого криволинейного движения, а не только для движения по окружности. Это связано с тем, что всякий участок криволинейной траектории в достаточно малой окрестности точки можно приближенно заменить дугой окружности. Радиус этой окружности, называемый радиусом кривизны траектории, будет меняться от точки к точке и требует специального вычисления. Таким образом, формула (1.14) остается справедливой и в общем случае пространственной кривой.
Дата добавления: 2015-08-08; просмотров: 1085;