Ошибки по регулярному задающему воздействию х(t)
Для изучения свойств точности системы ошибки в установившемся режиме работы системы вычисляются для трех пробных регулярных входных воздействий:
а)  a = const – постоянная составляющая,
a = const – постоянная составляющая,
б)  v = const – скорость входного воздействия,
v = const – скорость входного воздействия,
в)  , w = const – ускорение входного воздействия.
, w = const – ускорение входного воздействия.
Для расчета характеристик точности системы часто используют метод коэффициентов ошибок, применимый, когда:
- задающее воздействие является медленно меняющейся функцией времени по сравнению со временем переходного процесса системы;
- ошибки рассчитываются в установившемся режиме работы системы, то есть для моментов времени, намного превышающих время переходного процесса, t >> tn .
Эти допущения позволяют ограничиться тремя слагаемыми при разложении передаточной функции We x (s) по степеням s относительно s = 0.
 , (2.89)
, (2.89)
где g0, g1, g2 - коэффициенты ошибок по постоянной составляющей задающего воздействия x(t), по его скорости и ускорению.
Итак, с учетом разложения (2.89) выражения (2.83) при F(s) = 0 имеем:
 ,
,  , (2.90)
, (2.90)
и, применяя обратное преобразование Лапласа к обеим частям уравнения (2.90), получим
 ,
,  . (2.91)
. (2.91)
Для вычисления коэффициентов ошибок g0, g1, g2 либо делят "уголком" полином числителя на полином знаменателя передаточной функции  (это удобно делать в цифрах), либо их получают в результате приравнивания коэффициентов при одинаковых степенях s левой и правой частей соотношения, получаемого из (4.5) с учетом разложения (4.7)
(это удобно делать в цифрах), либо их получают в результате приравнивания коэффициентов при одинаковых степенях s левой и правой частей соотношения, получаемого из (4.5) с учетом разложения (4.7)
 . (2.92)
. (2.92)
Для повышения точности системы следует:
· повышать ее порядок астатизма (порядок астатизма системы определяется числом интегрирующих звеньев передаточной функции W(s)). Статические ошибки астатических систем всегда равны нулю, так как g0 = 0 (статической называется ошибка по постоянной составляющей входного воздействия, то есть при х(t) º a). Для астатической системы второго порядка ошибка и по скорости входного воздействия равна нулю, так как для этой системы и g1 = 0.
· повышать коэффициент усиления k системы в разомкнутом состояна - задержки на период квантования; б - умножения на постоянный коэффициент; в — сложенияии.
2.8.2. Ошибки, вызванные помехой f(t)
Случайная составляющая eсл(t) ошибки системы в данном случае вызывается действием помехи f(t). Рассматриваемая система является линейной и стационарной. Помеха f(t). – стационарный случайный процесс с нулевым математическим ожиданием и спектральной плотностью Sf(w). В этих условиях случайная составляющая ошибки eсл(t) также представляет собой стационарный случайный процесс с нулевым математическим ожиданием и спектральной плотностью
Se(w) = Sf(w)×½Kef(jw)½2, Kef(jw) = Wef(s)çs=jw . (2.93)
Ее дисперсия определяется выражением
se2 =  (2.94)
(2.94)
или, учитывая, что в рассматриваемом задании помеха представляется как белый шум и имеет постоянную спектральную плотность мощности Sf(w) » Sf(0) = const,
se2 =  . (2.95)
. (2.95)
Формулы для вычисления интегралов вида:
Jn =  (2.96)
(2.96)
приведены в [ 3 ] на стр. 321 – 322 (n – порядок системы).
Следует обратить внимание на совмещение обозначений: C(s) – знаменатель передаточной функции W(s) (см. (4.4)), а С(jw) - числитель комплексного коэффициента передачи Kef(jw) в формуле (4.13). Кроме этого, в этих формулах изменен порядок индексации коэффициентов ci: i = 0, 1, 2,…,n – 1 и dj: j = 0, 1, 2, …,n , т.е.
 (2.97)
(2.97)
Для исходной системы третьего порядка, т.е. при n = 3, интеграл J3 имеет вид
J3 =  . (2.98)
. (2.98)
Для результирующей системы четвертого порядка, т.е. при n = 4, формула для интеграла J4 имеет вид
 (2.99)
(2.99)
Удобно дисперсию ошибки представлять в виде
 , (2.100)
, (2.100)
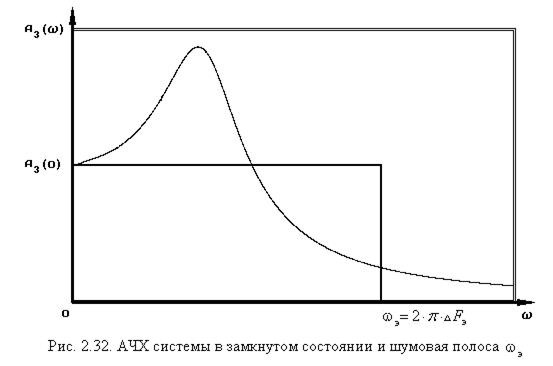
где DFэ =  - эквивалентная шумовая полоса рассматриваемой системы, равная полосе пропускания некоторой эквивалентной системы, имеющей прямоугольную амплитудно-частотную характеристику (АЧХ) замкнутой системы с тем же коэффициентом передачи на нулевой частоте, что и в рассматриваемой системе (см. рис. 10).
- эквивалентная шумовая полоса рассматриваемой системы, равная полосе пропускания некоторой эквивалентной системы, имеющей прямоугольную амплитудно-частотную характеристику (АЧХ) замкнутой системы с тем же коэффициентом передачи на нулевой частоте, что и в рассматриваемой системе (см. рис. 10).
Таким образом,
 . (2.101)
. (2.101)
Именно значение DFэ характеризует помехоустойчивость системы. Чем шире полоса DFэ, тем меньше помехоустойчивость системы.
Дата добавления: 2015-07-30; просмотров: 927;