Типове рішення автоматизації
Схема автоматизації розроблятиметься одночасно для процесів переміщення як рідин, так і газів, оскільки при швидкості газу менше швидкості звуку рух рідин і газів характеризується одними і тими ж законами.
Як об’єкт управління приймемо трубопровід 6, по якому транспортується рідина від апарату 1 до апарату 8, і відцентровий насос (компресор) 2 з приводом від асинхронного двигуна 4, що забезпечує її переміщення (рис. 9.8). Показником ефективності даного процесу служить витрата G переміщуваної рідини.
Процес переміщення в хімічній промисловості є допоміжним; його необхідно проводити таким чином, щоб забезпечувався ефективний режим основного процесу, обслуговуваного даною установкою переміщення. У зв’язку з цим витрата G повинна підтримуватися на визначеному, найчастіше постійному значенні. Тому метою управління процесом переміщення вважатимемо підтримку постійної витрати рідини в трубопроводі.
Проведемо аналіз об’єкту з метою виявлення збурень, можливості їх ліквідації і шляхів внесення дій, що управляють.
Масова витрата рідини в трубопроводі визначається по формулі
G=VFρ /9.1/
де V – швидкість переміщення рідини в трубопроводі; F – поперечний перетин трубопроводу; ρ – густина рідини.
Швидкість V залежить в загальному випадку від наступних параметрів:
V=f(∆P,μ, ρ) /9.2/
де ∆P – рушійна сила процесу (різниця тиску на початку Рп і в кінці Рк трубопроводу); μ – динамічна в’язкість переміщуваної рідини.
Рушійна сила ∆P залежить від характеристик насоса (числа обертів вала і кута нахилу лопаток), від тиску в апаратах куди і звідки переміщається рідина і від загального гідравлічного опору трубопроводу (опорів власне трубопроводу, поворотів, звужені і запірні арматури, разом взятих).
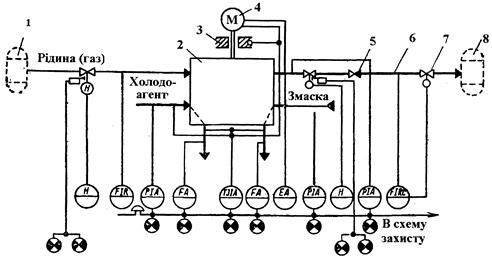
Рис. 9.8 Типова схема автоматизації процесу переміщення рідини: 1,8 – технологічні апарати; 2 – насос (компресор); 3 – підшипники; 4 – електродвигун; 5 – зворотний клапан; 6 – трубопровід; 7 – дросельний орган
Насос нормального виконання з асинхронним двигуном як привід має постійні характеристики. Використовуючи спеціальне устаткування, із зміною цих показників в об’єкт можуть бути внесені регулюючі дії.
Тиск в апаратах 1 і 8 визначається технологічним режимом процесів, що протікають в них. Якщо режим передбачає зміну тиску, то по даних каналах в об’єкт управління поступатимуть збурення.
Загальний гідравлічний опір трубопроводу може мінятися з багатьох причин. Його можна стабілізувати або ж цілеспрямовано змінювати переміщенням рухомої частини дросельного органу (вентилі, клапани, заслінки), встановленого на трубопроводі (дросельне регулювання). Ефективність такої регулюючої дії видно, наприклад, з приведених нижче даних для поворотної заслінки:
α………5 10 20 30 40 45 50 60 65
£………0,24 0,52 1,54 3,91 10,8 18,7 32,6 118 715
Щонайменші зміни кута повороту заслінки α викликають значні зміни її коефіцієнта гідравлічного опору £.
В’язкість μ і густина ρ переміщуваної рідини визначаються технологічним режимом попереднього процесу, тому їх зміни є збурюючими діями, ліквідовувати які при управління даним процесом неможливо.
Аналіз об’єкту управління показав, що велику частину збурюючих дій не вдається ліквідовувати. Враховуючи це, за регульовану величину необхідно взяти безпосередньо показник ефективності – витрата G. Найбільш простим способом регулювання при цьому є зміна положення дросельного органу.
При пуску, наладці і підтримці нормального режиму процесу переміщення необхідно контролювати витрату G, а також тиск у всмоктуючій і нагнітальній лініях насоса; для правильної експлуатації установки переміщення потрібно контролювати температуру підшипників і обмоток електродвигуна насоса, температуру і тиск мастила і охолоджувальної рідини; для підрахунку техніко-економічних показників процесу слід контролювати кількість енергії, споживаної приводом.
Сигналізації підлягає тиск в лінії нагнітання, оскільки значна зміна його свідчить про серйозні порушення процесу. Крім того, слід сигналізувати температуру рідини в лінії нагнітання, тиск у всмоктуючій лінії, тиск і наявність потоку в системі змащення і охолодження, температуру підшипників і обмоток електродвигуна, масла і води. Сигналізується також положення засувок в лініях всмоктування і нагнітання, що управляє пуском і зупинкою насоса.
Якщо тиск в лінії нагнітання Рп або параметри, що характеризують стан об’єкту, продовжують змінюватися, не дивлячись на вжиті обслуговуючим персоналом заходи, то повинні спрацювати автоматичні пристрої захисту. Вони відключають діючий апарат переміщення і включають резервний (не малюнку не показаний).
Розглянемо, як зміниться приведена схема автоматизації при інших цілях управління, при використанні поршневих машин в якості апаратів переміщення, застосування спеціальних конструкції насосів, компресорів і приводів для них.
Дата добавления: 2015-07-30; просмотров: 1325;