ПРИМЕНЕНИЕ РАДИОПЕЛЕНГАТОРНЫХ СИСТЕМ
Характеристика радиопеленгаторной системы. Радиопеленгаторная система является в первую очередь средством управления воздушным движением (УВД). С ее помощью диспетчер УВД на земле может определить пеленг ВС, то есть узнать, в каком направлении от него находится ВС. Но диспетчер может передать значение пеленга экипажу ВС и тот, в свою очередь, сможет использовать этот пеленг для решения своих навигационных задач наравне с пеленгами, полученными от АРК или VOR. Поэтому радиопеленгаторную систему также можно считать навигационной.
Радиопеленгаторная система, как и любая радионавигационная система, включает в себя наземную и бортовую составляющие.
Наземная часть представляет собой радиопеленгатор. Он устанавливается, как правило, на аэродромах или вблизи диспетчерских пунктов. Включает в себя антенну, приемное оборудование и пульт управления с индикатором, который стоит на рабочем месте диспетчера и по которому тот и отсчитывает пеленг.
На борту ВС никакого особого оборудования не требуется. Достаточно иметь обычную связную радиостанцию, с помощью которой экипаж ведет связь с диспетчером. С помощью этой радиостанции пилот может запросить у диспетчера пеленг. Наземный радиопеленгатор определяет, с какого направления пришли радиоволны и диспетчер отсчитывает значение пеленга. Он передает информацию об этом экипажу, и пилот получает ее с помощью этой же связной радиостанции.
Таким образом, основной частью системы является наземный радиопеленгатор, а от бортовой связной радиостанции требуется лишь, чтобы она работала в том диапазоне волн, которые пеленгатор способен принимать.
В настоящее время в гражданской авиации применяются радиопеленгаторы, работающие в УКВ (VHF) диапазоне волн, поскольку в этом диапазоне и ведется радиосвязь. Их называют ультракоротковолновыми автоматическими радиопеленгаторами (АРП). На английском языке их называют VHF Direction Finding Equipment, а сокращенно VDF. Для таких радиопеленгаторов выделен диапазон 118-137 МГц.
Радиопеленгаторы на полетных картах никак не обозначаются, поскольку являются средствами не навигации (для экипажа), а УВД (для диспетчера). А частота, на которой работает пеленгатор (если он есть) совпадает с частотой, на которой ведется радиосвязь – она всегда известна.
Приемная антенна АРП состоит из нескольких элементов, расположенных по окружности (рис.4.1). Поэтому радиоволна, идущая от самолета, достигает каждого из этих элементов не одновременно – ведь какие-то из элементов расположены к самолету чуть ближе, какие-то чуть дальше. В результате сигналы, принимаемые этими элементами, будут немного различаться по фазе. И эти различия будут зависеть от того, с какого именно направления пришла радиоволна. Каким именно образом по разностям фаз определяется пеленг – рассматривается в дисциплине Авиационные радиотехнические средства, а для применения пеленгатора в полете не имеет большого значения.

Рис. 4.1. . Антенна АРП DF 2000
Разумеется, существует множество марок радиопеленгаторов, выпускаемых различными предприятиями. На рис. 4.2 представлен один из пеленгаторов российского производства.

Рис. 4.2. Автоматический УКВ радиопеленгатор АРП-95
Пульты управления и индикации, с помощью которых диспетчер определяет пеленг, за десятилетия применения радиопеленгаторной системы также неоднократно видоизменялись и отличаются разнообразием. На рис. 4.3 представлен индикатор одного из современных пеленгаторов.

Рис. 4.3. Индикатор радиопеленгатора
Применение ультракоротковолновых пеленгаторов. Как следует из приведенного краткого описания принципа действия АРП, он определяет направление, с которого к нему пришли радиоволны, то есть измеряет пеленг самолета.
Но здесь используется специфическая терминология. Для пеленгов, измеренных радиопеленгатором, используются термины – прямой пеленг и обратный пеленг.
Прямой пеленг (ПП) – угол, заключенный между северным направлением меридиана, проходящего через пеленгатор, и направлением на самолет.
Отсчитывается, как и все пеленги, от северного направления меридиана пеленгатора по часовой стрелке от 0° до 360°. Из этого определения видно, что ПП – это просто пеленг самолета. Просто другое название (рис. 4.4).
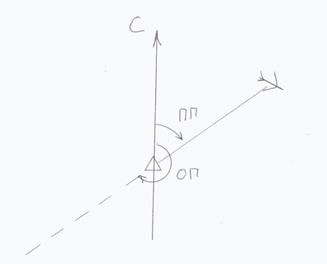
Рис. 4.4. Прямой и обратный пеленги
Обратный пеленг (ОП) – угол, заключенный между северным направлением меридиана, проходящего через пеленгатор, и направлением от самолета на пеленгатор.
То есть, это направление, просто противоположное ПП. Как ПП, так и ОП отсчитываются от меридиана одной и той же точки (меридиана пеленгатора) и поэтому различаются ровно на 180°:
ОП=ПП±180;
ПП=ОП±180.
Можно ли считать, что ОП – это практически то же самое, что и пеленг радиостанции? Можно, но с оговоркой. Ведь пеленг любой РНТ принято отсчитывать от меридиана, проходящего через самолет, а ОП отсчитывается, как и ПП, от меридиана радиопеленгатора. Меридианы РНТ и самолета не параллельны, хотя бы уже из-за наличия угла схождения меридианов. Как уже не раз говорилось в предыдущих параграфах, на небольших удалениях этим различием на практике можно и пренебречь.
В некоторых старых учебниках интерпретируют ОП как курс, который нужно взять для вывода ВС на пеленгатор. Примерно это так и есть, если только помнить, что все же курс и пеленг отсчитываются от разных меридианов. Да и угол сноса нужно учитывать.
Остается ответить еще на один важный вопрос: от какого именно меридиана пеленгатора отсчитываются ПП и ОП – от истинного или магнитного? Оба возможных ответа являются правильными и пилот сам всегда должен точно знать, какой пеленг он получил – истинный или магнитный.
АРП, используемые для полетов во внеаэродромном воздушном пространстве, то есть на трассах, ориентированы по истинному меридиану. Соответственно, пеленги измеряются истинные.
АРП, используемые в районе аэродрома, ориентируются по магнитному меридиану и выдают магнитные пеленги.
Это означает, что если пилот ведет радиосвязь с диспетчером районного центра, обслуживающим воздушное движение на трассах, то он получает истинные пеленги – ПП и ОП. Это удобно, поскольку для определения МС на карте как раз и нужно откладывать истинные пеленги самолета. А вот при контроле пути по направлению при полете на или от пеленгатора полученные пеленги нужно сравнивать с истинным путевым углом, отсчитанным от меридиана пеленгатора. Об этом нужно помнить.
Если же пилот ведет радиосвязь с аэродромными диспетчерами – диспетчером подхода или с диспетчером круга – то он получает пеленги от магнитного меридиана пеленгатора. При навигации в районе аэродрома, например, при заходе на посадку, у пилота нет времени заниматься графическими построениями на карте. Он использует пеленги для контроля пути по направлению путем сравнения пеленгов с заданными путевыми углами на участках схемы захода на посадку. А поскольку путевые углы на схемах указаны магнитные, то удобнее использовать именно магнитные ПП и ОП.
Максимальная дальность действия АРП такая же, как для всех средств УКВ диапазона, то есть зависит от высоты полета. В некоторых секторах от пеленгатора максимальная дальность действия может быть существенно ограничена наличием гор.
Точность измерения пеленга пеленгаторами старых типов (АРП-6, АРП-75) не очень высока и характеризуется СКП порядка 2-3°. По точности это сравнимо с VOR и несколько лучше АРК. Пеленгаторы новых типов обеспечивают более высокую точность. Например, АРП-95, рекомендованный к применению в гражданской авиации, имеет СКП порядка 1°.
За рубежом, в соответствии с документами ИКАО, VDF делят на классы в зависимости от точности.
Класс A обеспечивает точность ±2°.
Класс B обеспечивает точность ±5°.
Класс C обеспечивает точность ±10°.
Класс D обеспечивает точность хуже, чем класс C.
Приведенные значения погрешностей соответствуют вероятности 0,95, то есть представляют собой удвоенную СКП.
В зависимости от места расположения пеленгатор может иметь и дополнительные погрешности вследствие переотражения радиоволн от зданий, возвышенностей.
Таким образом, радиопеленгаторная система обладает не очень высокой точностью. В некоторых странах применение пеленгаторов классов C и D вообще не разрешается.
Пилот не может получать информацию от АРП непрерывно, а только в те моменты, когда получает пеленг от диспетчера. Поэтому и за рубежом, и в России радиопеленгаторная система не рассматривается как основное средство навигации и УВД. Она используется главным образом как средство, дублирующее для пилота и диспетчера информацию от других, более точных средств. Например, пилот выполняет заход на посадку по VOR или ОПРС, но для контроля использует информацию и от пеленгатора.
Вот пример радиообмена пилота (П) и диспетчера посадки (Д), который приведен в Федеральных авиационных правилах:
П: 411, четвертый 600 (это означает, что борт с сокращенным позывным 411 проходит четвертый разворот на высоте 600 м).
Д: 411, понял, обратный 270 (имеется в виду обратный пеленг – направление на аэродромный пеленгатор от ВС).
П: 411, снижаемся, шасси выпущено, к посадке готов.
Д: 411, обратный 275, посадку разрешаю.
На основе информации об обратном пеленге пилот может судить об уклонении от предпосадочной прямой, контролируя тем самым информацию от других бортовых средств.
При использовании пеленгаторов все еще иногда используется, в том числе и за рубежом, так называемый телеграфный код (Q-code). Его назначение состоит в уменьшении объема радиосвязи. Ведь раньше связь велась в телеграфном режиме азбукой Морзе. При использовании Q-кода можно вместо длинной фразы передать всего три буквы (первая всегда Q), которые будут обозначать то же самое. Q-код введен британским правительством и с 1913 г. принят для международного применения. Он еще и облегчает общение операторов радиосвязи, говорящих на разных языках. Ведь таблицы кодов одинаковы для всех стран.
К таким кодам относятся рассмотренные ранее (в первой части данного учебного пособия) обозначения давлений (QFE,QNH,QNE), хотя сейчас, конечно, их передают голосом, а не азбукой Морзе.
Применительно к пеленгаторам могут использоваться следующие значения кода:
QDM – magnetic bearing to station (ОП от магнитного меридиана);
QDR - magnetic bearing from station (ПП от магнитного меридиана);
QTE – true bearing from station (ПП от истинного меридиана);
QUJ – true bearing to station (ОП от истинного меридиана).
За рубежом радиосвязь с информацией от пеленгатора может выглядеть следующим образом:
Aircraft: Coventry Tower, Atlantic 52, request QDM.
Tower: Atlantic 52, QDM 180º, Class B.
Aircraft: QDM 180 º, Atlantic 52.
В данном примере пилот запросил и получил магнитный пеленг на пеленгатор (ОП). Диспетчер сообщил также класс пеленгатора, на основе которого пилот может судить о точности полученной информации.
В СССР для запроса у диспетчера значения ОП раньше также использовалась кодовая фраза «Прибой».
Полученные от АРП пеленги могут использоваться пилотом точно так же, как пеленги, полученные от других систем: для контроля пути, определения МС. В этом и заключается достоинство обобщенного метода линий положения. Если вы знаете, что такое, например, магнитный пеленг самолета и как его можно применить, то для его использования не столь важно, с помощью каких именно технических средств (VOR, АРК, АРП) он получен. Разве что точность может быть разной.
По двум ПП, полученным от двух трассовых АРП, легко определить МС. Для этого достаточно отложить эти ПП от пеленгаторов на карте и найти место самолета в точке пересечения проложенных ЛРПС. При этом не нужно даже учитывать ни магнитные склонения, ни, тем более, углы схождения меридианов. Ведь эти ПП и являются ИПС, отсчитанными от меридианов пеленгаторов.
При контроле пути по направлению при полете по трассе на или от пеленгатора нужно помнить, что поскольку пеленги истинные, то и сравнивать их нужно с заданными истинными путевыми углами, отсчитанными от меридиана пеленгатора.
Можно поступить и по-другому: заранее сообразить, при каком значении пеленга ВС будет находиться на ЛЗП и далее сравнивать с этим значением фактические пеленгов, опираясь просто на здравый смысл.
Допустим, ВС летит по трассе Б153 от пункта обязательного донесения РИБКА в сторону пункта Шенкурск (рис. 4.5). Предположим, что в Шенкурске расположен трассовый АРП (АРП на картах не обозначаются, поэтому оставим в стороне вопрос – имеется ли там пеленгатор на самом деле).
Поскольку пеленгатор трассовый (пилот ведет связь с диспетчером районного центра УВД Котлас), то диспетчер выдает истинные пеленги (ПП или ОП). Сообразим, какие должны быть ПП и ОП в случае, если ВС находится строго на ЛЗП.
ПП в данном случае – это ИПС от Шенкурска, где расположен пеленгатор, на самолет, находящийся на ЛЗП. Его легко определить, не измеряя транспортиром, а используя информацию на карте. Ведь там указан ЗМПУ=20° от Шенкурска на РИБКА. Он отсчитан тоже отсчитан от меридиана Шенкурска (начального ППМ участка), но от магнитного меридиана. А нам нужно знать это же направление от истинного. Вблизи Шенкурска на карте нанесена изогона, на которой написано (за пределами рисунка) магнитное склонение +14°. Соответственно, ЗИПУ, он же ИПС находящегося на ЛЗП самолета, составит 20+14=34°. С этой величиной нужно и сравнивать полученные от диспетчера ПП. Например, если диспетчер дал фактический ПП=36, то очевидно, что ВС находится южнее ЛЗП (ведь углы увеличиваются по часовой стрелке), то есть левее ее (при полете с востока на запад). Разность фактического и требуемого пеленга в данном случае представляет собой боковое уклонение (БУ=-2°).
Если необходимо, можно определить и требуемое для нахождения на ЛЗП значение обратного пеленга, ведь он отличается от прямого на 180º.
ОП=34+180=214.
Если диспетчер дал фактический ОП=210 (меньше требуемого для нахождения на ЛЗП), то спрашивается, с какой стороны нужно находиться от ЛЗП, чтобы ОП (направление на пеленгатор) было меньше требуемого? Правильный ответ – справа. В этом случае разность требуемого и фактического пеленгов – это дополнительная поправка (ДП=+4°).

Рис. 4.5. Контроль пути по АРП Шенкурск
Коротковолновые пеленгаторы. В третьей четверти ХХ века в авиации, в том числе гражданской, могли использоваться не только УКВ-пеленгаторы, о которых речь шла до сих пор, но и пеленгаторы, работающие в коротковолновом диапазоне (КВ-пеленгаторы). Из-за особенностей распространения коротких радиоволн дальность действия таких пеленгаторов могла превышать 5 тыс. км. Но связаться с операторами этих пеленгаторов, чтобы получить пеленг, можно было только в телеграфном режиме (азбукой Морзе). В настоящее время, когда в составе экипажа нет бортрадиста, такой подход к получению пеленга, конечно, нереален.
Рис. 4.6. Зарубежный индикатор КВ-пеленгатора времен Второй мировой войны
Два-три пеленгатора объединялись в так называемые пеленгаторные базы и работали совместно. Можно было запросить не только пеленг, но и непосредственно координаты МС (широту и долготу), которые определялись на земле операторами пеленгаторов по пересечению двух-трех ЛРПС. Кстати, можно отметить, что такой вид обслуживания (определение МС) в некоторых странах, например, в Великобритании, предоставляется и с помощью УКВ-пеленгаторов на аварийной частоте 121,5 МГц.
Несмотря на то, что угловая точность КВ-пеленгаторов довольно высока (0,5-1°), на больших удалениях она давала слишком большую линейную ошибку определения МС. Поэтому такие пеленгаторы использовались в основном военной авиацией при полете над безориентирной местностью (например, над Северным ледовитым океаном), где не было других средств навигации. Могли они использоваться и гражданской авиацией, но, как правило, в экстренных случаях (при потере ориентировки), чтобы определить примерный район нахождения МС.
В настоящее время в гражданской авиации России КВ-радиопеленгаторы не используются. Но нельзя считать, что они совсем ушли в прошлое. Известно, что для других целей используется, например, радиопеленгатор КВ-диапазона Р-703 с дальностью до 8 тыс. км и СКП измерения пеленга до 0,5°. Такие пеленгаторы также могут быть объединены в пеленгаторные базы.
Дата добавления: 2015-06-22; просмотров: 14672;