ДЕФОРМАЦИОННЫЕ МАНОМЕТРЫ 17 страница
хз
I
С)
аз
о Е
| Д1 |
| Блок представления |
| An |
Измерительный блок
Измерительный 5лок
Блок управления
Л/
| Коммутатор | Измерительный блок | Блок представления | ||
| Блок управления |
| Блок Д | Сканирующее устройство | Измерительный блок | Блок представления |
Блок управления
Результаты измерений в системах первой группы иногда обрабатываются с запаздыванием, поэтому объем запоминающих устройств может быть значительным.
В ряде случаев системы должны выполнять определенную статистическую обработку результатов измерения, например распределять полученные значения по разным уровням. Для этого в системы должны входить устройства задания уровней и сравнения.
В системах второй группы сопоставляются действительные значения параметров, характеризующих контролируемый процесс или объект, со значениями этих параметров, принятыми за нормальные или допустимые. Эти значения называют уставками. Системы этой группы часто называют системами централизованного контроля [1]. Характер поведения объектов практически известен заранее, а все его возможные состояния подразделяются, как правило, на нормальные и недопустимые («норма», «выше нормы» и «ниже нормы»). Информация, выдаваемая системами, носит качественный характер и отвечает на вопрос, находятся ли объекты в заданных режимах, либо вышли из него «вверх» или «вниз». Поэтому системы автоматического контроля могут быть менее универсальны, чем системы первой группы.
Часто промышленные системы автоматического контроля совмещают функции контроля, измерения и регулирования.
10.2. ПРЕОБРАЗОВАНИЕ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ В ИИС
Как указывалось (гл. 1), под преобразованием в измерительной технике понимается преобразование одной физической величины в другую, удобную для дальнейшего использования, передачи, обработки или представления. Этими операциями широко пользуются в ИИС. Действительно, для передачи и ввода в систему измерительной информации от датчиков, для сравнения, обработки и воздействия на носители информации измерительных сигналов необходимо многократное их преобразование в удобную стандартную унифицированную форму. Превращения измерительного сигнала, получаемого от первичного измерительного преобразования, в такие сигналы состоят из трех операций независимых или совмещенных: собственно преобразования, модуляции и кодирования (см. 1-4).
Как известно (гл. 1) [31], теория преобразования измерительных сигналов, в том числе теория модуляции и демодуляции, теория кодирования и декодирования в настоящее время объединяются и составляют общую теорию сигналов (связи). Основным направлением исследований этой теории является анализ передачи сигналов при наличии помех для достоверной их передачи от источника к приемнику.
Способность информационных устройств нормально функционировать-(т. е. получать, передавать, обрабатывать и представлять информацию) при наличии помех называется помехоустойчивостью.
Это очень важное свойство для ИИС, так как помехи, воздействуя на измерительный сигнал, приводят к увеличению погрешности измерения, т. е. понижают достоверность измерительной информации, выдаваемой системой.
Под помехой понимают любой дестабилизирующий фактор, действующий на сигнал и вызывающий потери информации, т. е. помеха — это причина возникновения погрешности или сбоя.
«

 | |||||
 |  | ||||
1. При использовании помехоустойчивых методов приема информации, кроме экранирования электромагнитных помех, которые можно условно назвать технологическими методами, в ИИС часто используют схемные методы борьбы с помехами. К ним относятся: симметрирование входов на измерительные преобразователи (иначе называемые «плавающими» входами); использование заграждающих фильтров, а также использование особых методов кодирования измерительной информации (например, интегрирующих преобразователей напряжения в код) и различных методов фильтрации принятого сигнала (например, методом накопления [28]).
2. При выборе видов модуляции для измерительных сигналов в том или ином участке ИИС основное внимание уделяется их помехоустойчивости. Сравним два вида модуляции AM и ЧМ (см. 1.4) для случая, когда измеряемый параметр задан как x(t) —Лт5Ш Qt, помеха представляет собой «белый шум», т. е. имеет равномерную спектральную плотность мощности С (о) в полосе частот от шс—Q до coc-ffi (сос — частота несущих колебаний).
Модулированный сигнал для AM и ЧМ соответственно можно записать:
Ux(t) = [Uc+ AU (/)jcos <oct
и
t
Цх (t) = Uc cos J [юс + Лео (0] dt.
При AM модулирующая составляющая
AU (t) = kx (t) = AUm sin Q t,
а ее средняя мощность
____ ____________________ о г/2 AU2
Pc-[At/(/)]2 = [Ac/msinQ/p = — f (AUm)2sin*Qtdt^ 2L ,
T 0J 2
где T=2n/Q.
Примем, что глубина полезной модуляции максимальна и равна единице, при этом AUn=--Uc. Тогда Рс = и\ / 2.
Средняя мощность помехи находится интегрированием величины dP= = G (со) dco — мощности, приходящейся на бесконечную узкую полосу частот:
Рп = — f G(co)dco w f G(co)dco=^Gfi.
n о о n i
Интегрировать в пределах больших, чем от 0 до 2, fi нет смысла, так как фильтр на выходе демодулятора, выделяющий низкочастотную составляющую, пропускает сигнал только в полосе 2fi. Отношение мощности сигнала к мощности помехи
(10-1)
V'Pn/AM 4GQ При ЧМ средняя мощность модулирующей составляющей
2 372 До2
Яс = [Д(о (012 = — J (A©)»sin«D№-
Т б1 2
Найдем мощность, обусловленную помехой. Так как {28]
-со)2 1
С
то
Рп = — G — J (toc — со) d со = 2G fi3.
я U\ -<*с+° 3nU2c
Тогда для этого случая отношение сигнал: помеха
М- = ------------------ Асо^. (10-2)
\РпУЧМ 4GQ3
Из сравнения выражений (10-1) и (10-2) видно, что при частотной модуляции относительное влияние помехи на выходе в Зр раз меньше, чем при амплитудной. Поскольку индекс модуляции p=Aco/fi обычно больше единицы, то относительное влияние помехи уменьшается в десятки и сотни раз. Однако следует помнить, что при частотной модуляции значительно расширяется спектр сигнала, что накладывает дополнительные требования на аппаратуру. Можно показать, что при импульсном носителе наименьшим отношением сигнал: помеха, т. е. наименьшей помехоустойчивостью, обладает амплитудно-импульсная модуляция, в то время как наиболее помехоустойчивой является фазово-импульсная модуляция.
3. Если говорить о помехоустойчивых методах кодирования, то, например, двоичный код не является помехоустойчивым. Действительно, если 1 передается импульсом, а 0 его отсутствием, то помеха может либо разрушить 1, либо создать импульс, т. е. 1, там, где его не было. При изменении одного из символов кодовая комбинация перейдет* в какую-то другую и будет декодирована неправильно. Чтобы этого не произошло, применяют коды с обнаружением ошибки и коды с исправлением ошибки. Такие коды называются корректирующими.
Простейшим примером кода с обнаружением ошибки может служить двоичный код, построенный следующим образом:
Число Код с обнаружением Число Код с обнаружением
десятков ошибки десятков ошибки
0 0000 0 6 ОНО О
1 0000 1 7 0111 1
2 0010 1 8 1000 1
3 ООП 0 9 1001 0
4 0100 1 10 1010 0
5 0101 0
В каждой двоичной кодовой комбинации добавлен лишний символ 1 или 0 таким образом, чтобы число единиц в комбинации было четным. Тогда, если какой-то символ исказится, на вход декодирующего устройства придет нечетное число единиц и ошибка будет обнаружена. Подобный код позволяет обнаруживать только однократную ошибку, т. е. искажение одного символа в кодовой комбинации. Если возможно одновременно искажение двух и более символов, применяют более сложные коды.
При построении многоканальных систем с временным или частотным разделением каналов соседние каналы влияют друг на друга, вызывая тем самым погрешность. Это влияние, а следовательно, и погрешность также зависят от вида модуляции и метода кодирования.
4. Обратная связь в ИИС является одной из мер по повышению помехоустойчивости и в зависимости от назначения может охватывать те или иные узлы.
На рис. 10-4 приведена часть структурной схемы ИИС, позволяющая показать некоторые возможные способы введения обратной связи.
| КдУ |
| Приемное устройство |
В первом способе (/) обратная связь охватывает приемное устройство (усилитель мощности) и линию связи. Изменение сигнала на приемном конце, обусловленное помехами, благодаря ОС воздействует на приемное устройство таким образом, чтобы изменение его режима скомпенсировало влияние
бых
| 'Ох |
Передающее _Литя_ устройство связи
Е_
ОС
Рис. 10-4
помех. Например, при повышении уровня помех в линии обратная связь вызывает увеличение выходной мощности каскада.
ИИС, в которых обратная связь выполняется вторым способом (//), можно разделить на системы с переспросом и системы со сравнением, которые иногда называются системами с информационной обратной связью.
В системах с переспросом кодирующее устройство КцУ формирует кодовые группы с дополнительными символами, служащими для обнаружения ошибки. Сформированные кодовые группы поступают для передачи в конечный каскад и, кроме того, на определенное время запоминаются в кодирующем устройстве.
При обнаружении ошибки на приемном конце в линии ОС вырабатывается сигнал, требующий повторения искаженной кодовой группы. Поскольку последняя группа хранится в памяти, ее повторение не вызывает трудностей.
Переспрос в подобных системах можно производить либо для отдельных символов кодовой комбинации, либо для всей кодовой группы в целом. Кроме того, переспрос может быть ограниченным, т. е. повторяться не более чем определенное число раз, и неограниченным. В этом случае сигнал повторяется до тех пор, пока кодовая группа не будет принята правильно. И, наконец, в системах с переспросом решение о правильности приема п раз переспрошенной комбинации может быть вынесено как с учетом ранее полученных комбинаций, так и на основании анализа только последней принятой.
В системах со сравнением каждая принятая кодовая группа передается обратно по линии ОС, а в кодирующем устройстве эти группы сравниваются с посланными. Если посланная и принятая комбинация совпадают, то по лииии посылается сигнал-квитанция, свидетельствующий о правильной передаче. Если эти комбинации не совпадают, то передача искаженной кодовой группы повторяется. Таким образом, в системах со сравнением выявителем искажения служит не приемник, как в системах с переспросом, а передатчик. Естественно, что искажения в канале обратной связи должны быть много меньше, ■чем в прямом канале. Этот способ применяют тогда, когда на объекте исследования нельзя поставить источник питания большой мощности, а мощность сигналов, посылаемых по каналу ОС, не ограничена.
Канал ОС в системах со сравнением загружен значительно больше, чем в системах с переспросом, так как в первом случае обратно посылается только сигнал, требующий повторения посылки, а во втором — все принятые сигналы.
5. Для исключения систематических и случайных помех в ИИС могут использоваться такие алгоритмы обработки измерительных сигналов в вычислительном блоке системы, как статистическое усреднение и сравнение с поверочными сигналами, фильтрация с помощью различных фильтров, расчет связанных величин по уравнениям связи со статистической их обработкой и определением систематических и случайных отклонений и т. д. (см. 1.5).
" Однако любое усложнение алгоритмической цепи преобразования измерительных сигналов в ИИС наряду с повышением достоверности измерительной информации, в частности от помех, может сопровождаться неоправданным увеличением погрешностей в этих операциях преобразования, например вычисления, а также часто уменьшением быстродействия и тем усложнением (и удорожанием) систем, которое в свою очередь приводит к ухудшению надежности функционирования системы.
Поэтому при выборе преобразований в ИИС, т. е. при разработке общей алгоритмической цепи, которая определяет необходимые преобразования входной информативной величины с целью достоверности получения искомой выходной величины, кроме помехоустойчивости системы, необходимо использовать те или иные критерии качества, эффективности, экономической целесообразности внедрения ИИС (см. 10.4). [28, 42].
10.3. ОСНОВНЫЕ УЗЛЫ ИИС
Как отмечалось выше (гл. 1, 10.1), после первичных измерительных преобразователей имеется измерительный сигнал, подлежащий унификации и масштабированию для ввода в ИИС. Поэтому непосредственно в датчике или в отдельном блоке после первичного измерительного преобразователя в системе используются унифицирующие преобразователи для создания унифицированного или стандартного измерительного сигнала ГСП с целью передачи его по линии связи. Для ввода унифицированных сигналов в линию связи или в измерительные и вычислительные блоки ИИС необходимо предусмотреть коммутирующие устройства. Наиболее общими устройствами измерительных блоков в ИИС являются устройства сравнения. Кроме того, в ИИС используются оригинальные запоминающие и представляющие устройства (включая устройства регистрации).
Каналы связи. Под каналом связи понимают совокупность технических средств, обеспечивающих независимую передачу сообщений. В эту совокупность входят: физическая среда, по которой передается сигнал, линия связи и устройства для передачи и приема сигнала.
В зависимости от характера передающей среды и физической природы сигналов линии связи (как и каналы), используемые в ИИС, можно разделить на гидравлические, пневматические, электрические, радио, акустические и оптические.
Для технологических измерений в основном используются пневматические и электрические линии связи, причем предпочтение отдается последним (см. 9.10).
Основными характеристиками канала связи являются: емкость, скорость передачи информации и пропускная способность канала-связи.
Емкость канала VK представляет собой произведение трех величин
VK — TKFKHKt
где Тк — время, в течение которого канал занят передаваемым сигналом; FK— полоса частот, пропускаемая каналом; Нк — характеристика, показывающая превышение мощности сигнала Рс» которую может пропустить канал, над мощностью помех Рп в канале.
Скорость передачи информации и определяет количество информации /, передающееся в единицу времени
и = ЦТ.
Максимально возможную скорость передачи информации по каналу называют пропускной способностью канала.
С = итах = - щах -у {Н (х) - Н (x/XN)}> (10-3)
где Н(х)—энтропия источника сигнала; H(x/XN)—условная энтропия, определяемая помехой и зависящая от ее уровня и характера.
Иначе говоря, пропускная способность определяет максимальное количество информации, которое можно передать в единицу времени. Размерность пропускной способности — ед. инф/с (см. 1.3).
Для того чтобы определить, насколько скорость передачи информации близка к пропускной способности канала, вводят характеристику называемую коэффициентом использования канала (г] = и/С).
Пропускная способность канала определяется только свойствами канала и не зависит от источников сигнала.
При передаче сигнала, представляющего собой непрерывную функцию x(t), и при условии, что: 1) ширина полосы частот ограничена частотой F\ 2) средняя мощность сигнала задана величиной Рс; 3) помеха в канале распределена по нормальному закону; 4) помеха в полосе F имеет равномерный спектр и мощность помехи задана как Рп; 5) сигнал и помеха статистически независимы, выражение (10-3) принимает вид
C-Flog(l + Pc/Pn).
Пропускная способность канала не обязательно растет пропорционально F, так как с увеличением полосы пропускания может возрасти и мощность помехи Рп.
При передаче сообщений с помощью двух символов — нуля и единицы — условная или остаточная энтропия
Н (xlXN) = ро log р0 + (1 — р0) log (1 — р0).
Поэтому выражение (10-3) принимает вид
С = и [log 2 + ро log Ро + (1 ~ Ро) log (1 — ро)],
где и — скорость передачи двоичных символов.
Пропускная способность достигает максимального значения в двух случаях: когда в канале отсутствует помеха, т. е. ро=0, и когда ро=1, т. е. заранее известно, что переданная единица превращается в нуль, и наоборот. В этих случаях C=aIog2.
При ро=0,5 равновероятен прием искаженного и неискаженного символов. Поэтому ничего достоверного о переданном сообщении сказать нельзя и C=Cmin=0.
Для того чтобы по каналу передавалась информация без искажений, необходимо, чтобы его емкость УИ была больше объема сигнала Vc, пропускная способность С была больше скорости выдачи информации источником сигнала ид. Таким образом, надо согласовать емкость канала с объемом сигнала, а пропускную способность канала — со скоростью поступления информации в канал.
1. Согласование величин VK и Vc. Под объемом сигнала понимают про-
изведение трех величин Vc~TcFcHCt где Тс —длительность сигнала, пока-
зывающая, на какое время занимается канал; Fc — ширина спектра сигнала;
И с — превышение сигнала над помехой.
Однако выполнение условия VR^VC не всегда достаточно; кроме него, должны выполняться соотношения TK^TCt FK^FC, НК^НС.
Если какое-либо соотношение не выполняется, а условие VK^VC соблюдено, то необходимо предварительное преобразование сигнала. Обычно для этого изменяют величины Fc и Тс. Например, если Fe=3FKt а Гс^Гк, то для выполнения условия неискаженной передачи в 3 раза увеличивают длительность всех элементов сигнала. При этом ширина спектра Fc уменьшается в 3 раза.
2. Согласование величин С и ид. Условием неискаженной передачи ин-
формации является выполнение соотношения ww<C=/7Klog(l+Pc/Pn), по-
зволяющее определить требуемую полосу пропускания канала.
Значение ыд можно определить следующим образом. Если количество информации, поступающее от источника в какой-то момент времени, т. е. соответствующее одному отсчету, равно /(*). а число отсчетов в секунду я, то скорость выдачи информации, т. е. ее количество, поступающее от датчика в 1 с, равно
ыд = п/ (х).
В частности, при n=l/At=2Fu (где Fh — ширина спектра измеряемой величины) скорость
«д = 2^„/ (х),
тогда
2 FJ (х) < FK log (l +-jr") '
откуда
F т> *ЬШ
log(l + Pc/Pn) Для частного случая, при /=logm, можно записать
F > 2 F* log т
log(l + Pc/Pn) '
Приведенным соотношением можно лользоваться и тогда, когда на вход канала поступает информация от / источников, опрашиваемых последова-
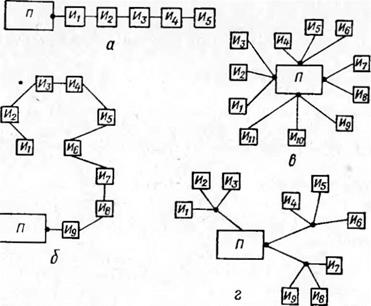
Рис. 10-5
тельно. В этом случае в качестве Fc берется полоса частот сигнала, получающегося после коммутации. Кроме того, под /(*) понимается информация, даваемая всеми источниками, в частности, если измеряемые величины статистически независимы, то I(x) =I(Xi) +1(х2) +...+/(**).
Отношение скорости передачи информации и к скорости поступления информации от источника ид называют коэффициентом передачи информации.
Используемые линии связи для ИИС отличаются не только устройством, но и структурой и, главное, способом разделения каналов.
При выборе структуры линии связи надо учитывать стоимость аппаратуры, размещенной на приемной и передающей сторонах. Однако можно допустить, что стоимость оконечной аппаратуры много меньше стоимости линий связи и поэтому ее влиянием на структуру линий можно пренебречь. Тогда определяющим при выборе структуры линий является ее экономичность и надежность.
Наиболее распространенные структуры линий связи, используемые для обслуживания рассредоточенных объектов, приведены на рис. 10-5.
Схемы, показанные на рис. 10-5,а и 10-5,6, называемые цепочечными или последовательными, можно использовать, когда объекты рассредоточены как вдоль линии (рис. 10-5, с), так и по площади (рис. 10-5,6). Схему, приведенную на рис. 10-5,в, называют радиальной, что следует из ее внешнего вида, а схему рис. 10-5,г — кустовой, так как здесь часто источники информации И объединены в общие группы (кусты), каждая из которых соединена с приемным пунктом П отдельной линией. Разновидностью кустовой схемы является древовидная, отличающаяся тем, что в точке соединений линий устанавливаются коммутирующие устройства. Кроме перечисленных, могут использоваться и смешанные структуры линий связи.
|
|
Выбор той или иной структуры линий определяется ее экономичностью и надежностью. В то же время экономичность и надежность зависят от
| Устройство | Передающее устройство | Линия | Приемное | Устройство 1 | ||
| уплст-нения каналов | Г** | связи | устройство | разделения каналов |
Рис. 10-6
протяженности линии, т. е. ее длины. Таким образом, для удешевления линии необходимо найти способ кратчайшего соединения источников информации с приемным пунктом.
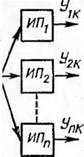
В большинстве случаев при построении ИИС требуется одновременно передавать информацию от множества объектов к одному получателю. Использовать для передачи сообщений от каждого объекта отдельную линию связи экономически невыгодно, а часто просто невозможно, поэтому возникает необходимость передавать всю информацию по одной и той же линии, но так, чтобы каждое сообщение передавалось по своему каналу связи. Для этого на передающем конце линии необходимо устройство уплотнения каналов (рис. 10-6).
На приемном конце линии соответствующие устройства разделяют сообщения, направляя каждое своему измерительному преобразователю ИП; информационных сигналов. Такая система связи, когда при одной линии создается множество каналов, называется многоканальной.
Для того чтобы сигналы, передающие сообщения по каналам, можно было разделить, их нужно различать по каким-то признакам. В зависимости от того, какие признаки сигналов используются для разделения каналов, различают и способы построения многоканальных систем. Наиболее распространены способы частотного и временного разделения каналов.
В некоторых системах используют комбинированное, т. е. совместно частотное и временное, разделение. Возможно также разделение по форме сигналов и фазе.
В системах с частотным разделением каналов чаще используются амплитудная, частотная и фазовая модуляции. В системах с временным разделением каналов может применяться любой ее вид.
В ИИС для технологических величин чаще всего используется временное разделение каналов. При этом информация по каждому каналу передается периодически в течение короткого промежутка времени, который намного меньше периода опроса всех каналов *. Для уменьшения влияния канала на канал между ними нужно оставлять защитные промежутки времени, значения которых определяются допустимыми погрешностями передачи информации по линии связи в системе.
Происхождение этой погрешности при временном разделении каналов связано с тем, что сигнал в канале передается прямоугольным импульсом,
т. е. импульс отличен от нуля только
| U К-1-й КФШл |
| ли |
| ртах |
 в пределах определенного интервала времени, а за его границами сигнал отсутствует. Однако сигнал, ограниченный во времени, имеет бесконечный спектр и поэтому не может быть передан без искажения. На практике любые каналы имеют ограниченный спектр, а это искажает импульс, т. е. удлиняет его передний и задний фронты или, иначе говоря, происходит расплывание импульса. Подобное расплывание импульса во времени приводит к тому, что часть импульса попадает в соседние интервалы времени, отведенные для соседних каналов. Попадание импульса в соседний канал и является причиной погрешности.
в пределах определенного интервала времени, а за его границами сигнал отсутствует. Однако сигнал, ограниченный во времени, имеет бесконечный спектр и поэтому не может быть передан без искажения. На практике любые каналы имеют ограниченный спектр, а это искажает импульс, т. е. удлиняет его передний и задний фронты или, иначе говоря, происходит расплывание импульса. Подобное расплывание импульса во времени приводит к тому, что часть импульса попадает в соседние интервалы времени, отведенные для соседних каналов. Попадание импульса в соседний канал и является причиной погрешности.
Рассмотрим влияние на 6-й канал только одного предыдущего k— 1-го канала. Импульсы, передаваемые по этим каналам, приведены на рис. 10-7. Вследствие фазовых или амплитудных искажений на верхнем конце полосы пропускания импульсы искажены, т. е. их передние и задние фронты удлинены. Если интервал между соседними импульсами мал, то в результате влияния А—1-го канала импульс в k-м канале изменяется, причем изменяется как его амплитуда (на &U), так и длительность (ширина). Изменение амплитуды вызывает погрешность при применении амплитудно-импульсной модуляции. Если же используется время — импульсная модуляция, то импульсы предварительно ограничиваются по максимуму и минимуму, в результате чего на демодулятор поступают импульсы с амплитудой Uo max—U0 mm. В этом случае погрешность обусловлена изменением ширины импульса, а изменение его амплитуды погрешности не вносит.
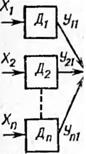
Унифицирующие преобразователи. Не все подключаемые к системе датчики имеют на выходе унифицированную форму измерительного сигнала. Поэтому между датчиком и системой включают специальный унифицирующий преобразователь (УП). Эти УП должны работать так, чтобы различным
1 Для большинства ИИС время опроса по одному каналу выбирается одинаковым для всех каналов системы.
диапазонам изменения или различной физической величине измерительных сигналов на входе соответствовал один и тот же диапазон изменения унифицированного выходного сигнала.
УП может быть как индивидуальным для каждого датчика, так и обслуживать определенную группу датчиков. При втором способе унификации датчики к УП подключаются поочередно. Так как унификация (преобразование сигналов) может проводиться в несколько этапов, то первый способ используется чаще для унификации сигналов с датчиков при передаче их по линиям связи, а второй —при обработке их в вычислительном блоке (кодирование).
а

Рис. 10-8
Если характеристика датчика линейна и меняется в пределах от до Х2, а шкала выходного сигнала УП должна лежать в пределах от Утт до Утах, то унифицирующий преобразователь должен выполнять линейную операцию вида
Дата добавления: 2015-06-22; просмотров: 784;