ДЕФОРМАЦИОННЫЕ МАНОМЕТРЫ 15 страница
RiRs=R*R+ (9-13)
Это равенство может быть обеспечено путем изменения сопротивления одного, двух или трех плеч. Для увеличения чувствительности равновесных мостов с параметрическими преобразователями для уравновешивания применяют переменный резистор, включенный между соседними плечами моста (в одно из которых помещен параметрический преобразователь) и создающий равнозначные, но противоположные по знаку изменения сопротивлений этих плеч. Подобная схема уравновешивания мостовой цепи приведена на рис. 9-12.
Условие равновесия при изменении сопротивления резистора (например, R1) на величину ±APi
[(Я, ± ДЯЛ + (ЯР + АЯР)]:Я3 = Я/(Я2 ± АЯР) (9-14)
или АЯР= *' АЯ1 (9-15)
показывает, что сопротивление переменного резистора может служить мерой изменения Яь т. е. ±АЯ1 (или ±ДЯтс), а чувствительность больше, чем при изменении сопротивления одного из плеч.
Уравновешивание как в мостах, так и в потенциометрах осуществляется автоматически с помощью исполнительного узла интегрирующего типа, в качестве которого в этих приборах выступает реверсивный двигатель. При малых значениях разбаланса моста At/, пока сохраняется линейная зависимость между скоростью двигателя и приложенным к нему напряжением, угол поворота двигателя является интегралом от значения AU и двигатель можно рассматривать как интегрирующее звено.
Обратная цепь,,^"
Рис. 9-13
Поэтому автоматические электронные приборы с реверсив-_м двигателем для автоматизации операции уравновешивания представляют собой следящие астатические устройства уравновешивания.
Автоматические электронные приборы, мосты и потенциометры со следящим астатическим уравновешиванием по одному параметру нашли широкое применение в технологических измерительных комплектах (см. гл. 2) [30, 46].
Структурная схема автоматических электронных приборов уравновешивания типа мостов, потенциометров и на их основе потенциометров-миллиамперметров приведена на рис. 9-13.
Как все приборы уравновешивающего преобразования со следящим астатическим уравновешиванием (гл. 2), они содержат прямую и обратную цепи ОЦ. На входе приборов, где производится уравновешивание измеряемой величины X измерительным сигналом обратной цепи Х$ (см. рис. 2-1) необходима измерительная цепь сравнения ИЦС АХ=Х—Хр.
В качестве цепи сравнения используется мостовая измерительная цепь, в мостах — равновесная, в потенциометрах — неравновесная. В результате выявленная в ИЦС разница АХ поступает на электронный нуль-индикатор ЭНИ, состоящий из электронного усилителя напряжения ЭУН и электронного усилителя мощности ЭУМ, обладающего свойством фазочувстви-тельности. Для исключения дрейфа нуля, присущего усилителям постоянного тока, и обеспечения большого коэффициента усиления усилители всех автоматических приборов работают на переменном токе.
Исполнительным устройством, осуществляющим операцию автоматического уравновешивания, является реверсивный двигатель РД (интегрирующее звено), который воздействует на устройство обратной связи до тех пор пока разность между измеряемой и уравновешивающей величинами не станет равной нулю (Д£/=0), точнее, порогу чувствительности нуль-индикатор ЭНИ. Порог чувствительности нуль-индикатора определяется двумя составляющими. Во-первых, это случайная погрешность из-за наличия в двигателе порога трогания, приведенная ко
I1/"!! Заказ №301 321
входу ЭНИ и зависящая от коэффициента усиления ЭНИ Во вторых, это дрейф нуля ЭНИ, который определяется уровнем шумов и наводок, приведенных к входу нуль-индикатора. ДЛя их снижения принимается ряд мер (фильтрация питания, экранирование и др.).
Как было показано в гл. 2, при достаточно большой глубине уравновешивания (о-Я), х-И) результирующая погрешность таких приборов в первую очередь характеризуется мультипликативной погрешностью обратного преобразователя, т. е. совершенством его исполнения.
К общим достоинствам приборов со следящим астатическим уравновешиванием (см. рис. 9-13) относятся возможность прямого отсчета на регистрирующем устройстве РУ по показанию интегрирующего звена (например, РД) и большой устанавливающий момент на валу двигателя, что позволяет создавать регистрирующие приборы с бумажными диаграммами. Недостатки этих приборов заключаются в незначительном рабочем диапазоне на каждом пределе измерения (£>р=5-ь 10), сравнительно малом быстродействии (при электромеханическом исполнении время перемещения указателя вдоль всей шкалы не менее 1—0,5 с) и опасности возникновения автоколебаний при попытках увеличения коэффициентов усиления в прямой цепи для уменьшения погрешностей устройства.
Автоматические электронные мосты широко используются для измерений технологических параметров и в первую очередь для измерения температуры. В новейшей серии вторичных приборов «К» автоматические мосты выпускаются миниатюрные, малогабаритные и нормально габаритные с плоскими и вращающимися шкалами, одно- и многоточечные, с записью на круговой и плоской диаграмме, со встроенными выходными преобразователями ГСП, преобразователями реостат-
322 лого, дифференциально-трансформаторного и ферродинамиче-' ского типов.
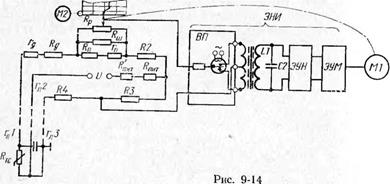
Структурная схема самопишущего моста типа KCM приведена на рис. 9-14. Три плеча измерительной равновесной мостовой цепи состоят из резисторов с манганиновыми сопротивлениями R2, R3 и R4. В четвертое плечо включен термометр электрического сопротивления Ртс по трехпроводной схеме (см. рис. 9-8, б). Резисторы Рд и гд (рис. 9-14) служат для ограничения тока, протекающего по преобразователю, и его подгонки. При под-■ключении параметрического преобразователя предусматривается фильтрация внешних наводок на него, особенно низкой и промышленной частоты. Эту функцию выполняет RTCC1 — фильтр, в котором конденсатор с емкостью С, выбирают из расчета Xc = aC<RTC/\0-100.
Переменное сопротивление реохорда Rp служит для уравновешивания мостовой цепи. Для подгонки сопротивления R3kb =
'■д- t которое стандартизируется и должно воспроизво-
диться при замене реохорда, служит шунт Rm. Резистор с сопротивлением Rn определяет пределы измерения моста в соответствии с коэффициентом его преобразования [30, 45].
rs А#р Кз Кэкв + #п (9-16)
м~ ДЯтс ' Ra + Rt + raa ' Дп
а Гц служит для подгонки его пределов измерений.
Колебания питания мостовой цепи изменяют чувствительность мостовой цепи. Поэтому при настройке и при эксплуатации в автоматических приборах производится проверка и регулировка значений токов с помощью добавочных сопротивлений: постоянного R пит и переменного /\пит-
При питании мостов постоянным током (и в потенциометрах) в состав ЭНИ (см. рис. 9-14) входят вибропреобразователи ВП, которые разбаланс моста в виде напряжения постоянного тока соответствующего знака преобразуют в напряжение переменного тока соответствующей фазы и промышленной частоты. Причем для согласования выходного сопротивления моста с входным сопротивлением ЭНИ и выделения первой гармоники напряжения после ВП (f=50 Гц) используют входной трансформатор с ZJC2-KOHTypoM (настроенным на /=50 Гц).
Электронные усилители напряжения ЭУН и мощности ЭУМ переменного тока увеличивают сигнал разбаланса моста до значения достаточного для воздействия на реверсивный двигатель Ml, которое определяется порогом его трогания. Фазочувстви-тельность ЭУМ позволяет в управляющую обмотку двигателя подать ток соответствующей фазы и обеспечить нужное для компенсации разбаланса моста направление его вращения. Двигатель связан с движком реохорда Rv и перемещает его до тех
' iVa 11- 323
пор, пока не наступит равновесие моста. Одновременно он перемещает указатель и регистрирующее устройство, которое на диаграммной ленте, движущейся с помощью синхроного двигателя М2 с определенной скоростью, записывает изменение измеряемой неэлектрической величины, например температуры.
Классы точности современных автоматических мостов, нормированные по приведенной погрешности, составляют 0,25; 0,5; 1,0, хотя часто погрешность отсчета не обеспечивает таких значений. Эти приборы являются одними из самых точных технических средств измерений. Однако их сравнительно большая сложность и, следовательно, пониженная надежность, высокая стоимость и большие габарит и масса заставляют отдавать предпочтение магнитоэлектрическим приборам прямого преобразования при работе с датчиками неэлектрических величин, если нет необходимости регистрировать во многих точках измеряемые величины, а требования к метрологическим характеристикам не являются определяющими.
Новейшие автоматические мосты типа МФП (показывающие) и МФС (самопишущие) являются безреохордными с фер-родинамическими компенсирующими устройствами. В этих устройствах напряжение разбаланса измерительной диагонали мостовой цепи компенсируется напряжением, возникающим в рамке ферродинамического преобразователя при перемещении ее реверсивным двигателем. Автоматические приборы снабжены фер-родинамическими, частотными и пневматическими выходными преобразователями. Основная погрешность таких приборов определяется погрешностью у =±0,5 %, а время прохождения указателем всей шкалы 2,5; 6; 16 с.
В комплекте с датчиками неэлектрических величин, выходной сигнал которых представляет небольшие напряжения постоянного тока, наибольшую точность обеспечивают потенциометры.
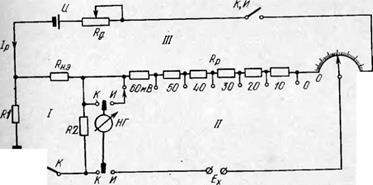
Принципиальная схема потенциометра, представленная на рис. 9-15, поясняется на примере переносного потенциометра типа ПП.
Неизвестное напряжение Ех определяют в два этапа: 1. В положении ключей К нуль-гальванометр НГ подключают к цепи /. Изменением значения Рд добиваются установки гальванометра на нуль. При этом
Янэ = /Р = £„э, (9-17)
где Еиэ —ЭДС образцовой меры — нормального элемента.
Сопротивления R1 и R2 служат для ограничения тока, протекающего по нормальному элементу, создающему опорное напряжение £нэ, при установке рабочего тока. Таким образом, на первом этапе при установке рабочего тока /р, протекающего по цепи ///, устанавливается его расчетное значение. Расчетное значение тока выбирается таким, чтобы падение напряжения
на сопротивлениях реохорда Рр было равно значению, приведенному в схеме.
2 На втором этапе измеряют Ех. Ключи перебрасываются в положение И, и нуль-гальванометр подключается к цепи //. С помощью секционного ступенчатого изменения сопротивления реохорда (падение напряжения на котором соответствует ступеням по 10 мВ) и плавного изменения сопротивления (падение напряжения на нем составляет 11 мВ) осуществляется уравновешивание Ех. Текущее значение измеряемого напряжения составляет EX=RVIV, или с учетом (9-17).
| (9-18) |
| НнВ |
|
— снэ-*<н э
Рис. 9-15
Выражение (9-18) подтверждает возможность получения в потенциометрах высокой точности измерения. Действительно, если учесть, что на современном уровне развития измерительный техники порог чувствительности обычных нуль-гальванометров магнитоэлектрической системы составляет 10~8—10~9 А на 1 деление, то погрешность измерения определяется согласно (9-18) из выражения
6£ = 6Д -bR -аЕ . (9-19)
Из (9-19) следует, что б£ зависит от погрешностей изготовления сопротивлений Рр, Рнэ и нормального элемента Ет. Все три составляющие достаточно малы, поскольку погрешность манганиновых специально состаренных сопротивлений составляет ±(0,01+0,001) %, а ЬЕ =±0,05%. Кроме того, в момент компенсации в / и // цепях токи равны нулю, т. е. не потребляется ток ни от нормального элемента, ни от измерительной цепи.
М Заказ № 301 325
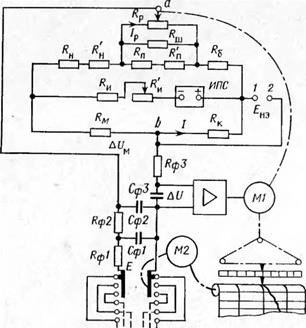
На рис. 9-16 изображена принципиальная схема автоматического потенциометра типа КСП. Эта схема аналогична, кроме некоторых элементов цепи сравнения, схеме автоматического моста типа КСМ.
Измерительная цепь трехточечного потенциометра состоит из двух ветвей. В одну ветвь, измерительную, включены резисторы
I--------------- им п I
777/ \/ ТП2 \J ТПЗ Рис. 9-16
Ян, /?б и Rp с параллельными элементами Рш и Rn, аналогичными схеме моста (см. рис. 9-14). Начало шкалы и пределы измерения потенциометра регулируются с помощью подстроеч-ных сопротивлений R6 я R'^.
Резисторы второй ветви RK и RM, вспомогательной, образуют цепь контроля рабочего тока мостовой цепи и коррекции погрешности из-за изменения температуры свободных концов термоэлектрических термометров, если потенциометр применяется для измерения ТЭДС. В этом случае RM выполняют из медной проволоки и располагают на входной панели прибора, где под-326 соединяются к нему концы термопары. Компенсация изменения ТЭДС при колебаниях температуры свободных концов осуществляется аналогично тому, как и в устройстве типа КТ (см. 3.5).
Сопротивление резистора RK, выбирается из условия lRK=Em. Благодаря этому можно по падению на нем напряжения контролировать рабочий ток / при периодическом подключении нормального элемента Енэ к клеммам 1 я 2.
Требуемое значение / устанавливается с помощью резистора Rk и регулируется подгоночным сопротивлением RB
В современных автоматических приборах для питания мостовых цепей используются источники стабилизированного питания ИСП, иначе электронные стабилизаторы постоянного напряжения с кремниевыми стабилитронами в качестве опорных элементов. Поэтому установка рабочего тока в этих приборах осуществляется через несколько тысяч часов непрерывной работы.
В измерительной цепи сравнения производится компенсация измеряемой ЭДС Е, например, ТЭДС от 777/, ТП2 я ТПЗ, напряжением разбаланса мостовой цепи в измерительной диагонали abAUM- Результат сравнения в виде напряжения Д£/= =E—AUM поступает на вход усилителя. После вибропреобразователя, усиления прямоугольного напряжения входным трансформатором (п=10) и выделения синусоидального напряжения с помощью L/C-2-фильтра (см. рис. 9-14) напряжение поступает на трехкаскадный ЭУН. Затем сигнал усиливается по мощности ЭУМ, который благодаря фазочувствительности воздействует на управляющую обмотку реверсивного двигателя Ml таким образом, что движок реохорда, соединенного с ним, перемещается в сторону, где достигается уравновешивание измеряемой Е, т. е. E = AUM-
Если принять зависимость Е от разницы температур рабочего tp и свободного конца /Св.к термопары; близкой к линейной, то получим, учитывая, что изменение ^Св. к скорректиро-ванно,
£ = STn0p-*cBK) = STn*p, (9"2°)
где STn—чувствительность термопары (в действительности не является постоянной величиной).
При равновесии в статическом режиме значение Е определяется из выражения
E = MJU = KJpARp - KJpM/LRp, (9-21)
гДе L — полная длина намотки реохорда; А/— перемещение движка рео-Х0РДа; /,, — ток реохорда; /С», — коэффициент преобразования мостовой цепи,
равный -^^м ; Д{/р — падение напряжения на ARV. At/p
Тогда для шкалы автоматического потенциометра зависимость А/ имеет вид
M= KMf^tp. (9-22)
Эта зависимость соответствует линейной шкале потенциометра с той точностью, с которой выполняется допущение о постоянстве 5ТП. При этом должны выполняться условия: Rp = const и /р = const. Оба условия, как было показано выше, легко выполняются. Значение Км можно считать постоянным с погрешностью 0,01—0,001 %•
Для уменьшения внутренних и внешних наводок, поступающих с термопар и проводов, цепи термопар шунтируют RC-фильтрами: РФ1СФ1, РФ2СФ2 и #ФЗСФ3.
К приборам уравновешивания примыкают миллиамперметры и вольтметры типа КСУ, предназначенные для измерения силы постоянного тока 5; 20 мА и напряжения постоянного тока 1, 10 В. Эти приборы отличаются от автоматических потенциометров типа КСП только тем, что параллельно входу приборов включено калибровочное сопротивление (для миллиамперметров) или делитель напряжения (для вольтметров). В миллиамперметрах ток от стандартного датчика с токовым входом протекает по калиброванному входному сопротивлению и создает определенное падение напряжения в потенциометре. В вольтметрах измеряется малое напряжение, снимаемое с делителя.
Приборы этой серии выпускаются на 1, 3, 6 и 12 точек измерения с однотипными датчиками со временем прохождения каретки по всей шкале 1; 2,5; 5; 10 и 16 с. Приборы содержат сигнализирующие, регулирующие двух- и трехпозиционные устройства, а также стандартные преобразователи ГСП, преобразователи ферродинамического и реостатного типов для дистанционной передачи показаний.
В этой же серии новейших вторичных приборов выпускаются миниатюрные показывающие (типа ЭПП) и самопишущие (типа ЭПС) потенциометры, которые являются безрео-хордными уравновешивающими одноточечными устройствами. В отличие от рассмотренных выше приборов в этих потенциометрах компенсация измеряемого значения напряжения осуществляется преобразованием перемещения двигателя в изменение положения валика, входящего в частотный преобразователь, выходная частота которого преобразуется в напряжение уравновешивания. Эти приборы также снабжены стандартными и унифицированными преобразователями с электрическими (аналоговыми и частотными) и пневматическими выходными сигналами, а также сигнализирующими устройствами.
Для широкого класса электромагнитных, взаимоиндуктивных датчиков дифференциально-трансформаторного типа, преобразующих неэлектрические величины в электрический сигал (для передачи его по линии связи), приемным измеритель-м устройством служат дифференциально-трансформаторные приборы со следящим астатическим уравновешиванием (см. гл. 2).
На рис. 9-17 представлено принципиальное устройство дифференциально-трансформаторного измерительного комплекта, состоящего из преобразователя ДТП и прибора, например, типа КСД-3: Взаимоиндуктивный преобразователь ДТП со-

Рис 9-17
стоит из двух обмоток, первая из которых / является первичной обмоткой возбуждения, питающейся от сети. Вторая II состоит из двух вторичных обмоток с выходными сигналами ех и е2, включенных последовательно и встречно, т. е. Е = е\—е2.
Дифференциальное включение вторичных обмоток приводит к тому, что при перемещении магнитомягкого сердечника У (связанного с ПИП) в определенном направлении в одной обмотке индуцируемое напряжение увеличивается на Ае, а в другой уменьшается на Де, а разностный сигнал равен двойному изменению напряжения каждой Ех=2Ае и снимается с переменного для регулировки делителя R'—R". При обратном движении сердечника изменение напряжения во вторичных обмотках будет противоположным, что приведет к изменению знака Е\.
Это напряжение по линии связи подается на измерительный прибор КСД-3, в котором имеется аналогичная система катушек /, III и IV. Разность напряжений Ех и Е2 через делитель R2—R3—R4 и интегрирующую цепочку R5C4 (которая предназначена для компенсации фазового сдвига в элементах ком-
плекта) подается на вход электронного усилителя и далее к реверсивному двигателю Ml. Двигатель под влиянием сигнала А.Е, пропорционально измеряемой ПИП величине, перемещает лекало 3 и сердечник 2 до момента когда АЕ=Ех—Е2 = = 0, т е. каждому значению измеряемой величины соответствует определенное положение сердечников 1 и 2 и отсчетного устройства ОУ, которое связано с двигателем М2, вторичного прибора.
Для установки начальной (нулевой) отметки шкалы в приборе предусмотрена IV обмотка, шунтированная переменным резистором R1. Если сердечник находится в начальном (нижнем) положении, а стрелка прибора не устанавливается на нулевую отметку шкалы, осуществляется регулировка цепи перемещением движка R1.
Исправность прибора проверяют с помощью кнопки контроля К. При ее замыкании цепь вторичной обмотки II отключается и на вход усилителя подается сигнал от обмотки 7/7. В этом случае Ml установит указатель в среднее положение, отмеченное на шкале прибора, при котором Д/:=Де=0. Если при контроле стрелка не устанавливается в указанное положение, прибор настраивают перемещением катушек относительно сердечника 2. После проверки вновь регулируют начальную точку резистором R1. Резистор R2 в отличие от других манганиновых выполняется медным для компенсации температурных погрешностей вторичной обмотки прибора.
Введение регулируемых элементов в цепи дифференциально-трансформаторной системы делает этот комплект взаимозаменяемым. В результате возможны раздельная поставка преобразователей и вторичных приборов без жестких требований к точности их изготовления, а также работа одного прибора с группой дифференциально-трансформаторных преобразователей.
Дифференциально-трансформаторная система широко применяется при передаче измерительных сигналов на расстояние до 4—6 км. Вторичные приборы этой системы могут комплектоваться выходными преобразователями Г, Д, Е (см. рис. 9-17) с электрическими и пневматическими выходными сигналами, используемыми для подключения дублирующих приборов, регулирующими А, Б и сигнальными В устройствами [1].
С развитием ГСП все большее значение приобретают аналоговые приборы со следящим астатическим уравновешиванием (см. гл. 2) ферродинамической системы с электрическими аналоговыми, электрическими дискретными (частотными) и пневматическими выходными сигналами. Они предназначены для работы в комплекте с измерительными устройствами, снабженными выходными ферродинамическими (ПФ) и дифференциально-трансформаторными (ПД) преобразователями. Эти приборы развивают большой вращающий момент и
\
выпускаются в основном в миниатюрном исполнении показывающими самопишущими с записью на диаграммной ленте, а также со встроенными выходными преобразователями и регуляторами.
 На рис. 9-18 изображена схема устройства ферродинамиче-ских преобразователей перемещения в электрический унифицированный сигнал переменного тока, которые встраиваются в передающее и принимающее измерительное устройство для передачи показаний на расстояния.
На рис. 9-18 изображена схема устройства ферродинамиче-ских преобразователей перемещения в электрический унифицированный сигнал переменного тока, которые встраиваются в передающее и принимающее измерительное устройство для передачи показаний на расстояния.
Устройство представляет собой ферродннамический измерительный механизм, состоящий из электромагнита, включающего катушку 1 с обмотками возбуждения и смещения, магнитопроводов 2, 6 с ферромагнитным сердечником 3 и бескаркасной рамки 4. Сердечник 3 механически связан с первичным измерительным преобразователем или с компенсирующим преобразователем во вторичном приборе. Поворот сердечника в поле электромагнита на угол а наводит ЭДС Ev в рамке 4, укрепленной на сердечнике, равную Ер = У2 со Bbwr а = k а, (9-23) где коэффициент k пропорционален угловой частоте тока в обмотке возбуждения со, магнитной индукции
в зазоре В, длине провода рамки, пересекающего магнитное иоле и определяемого числом витков w и высотой сердечника Ъ, и среднему радиусу рамки т.
ЭДС в рамке пропорциональна взаимоиндуктивности между обмоткой возбуждения и рамкой, которая равна 0 при совпадении плоскости рамки с нейтралью NN и максимальна при а=±20°. Значение выходного напряжения, снимаемого с рамки через спиральные пружины, регулируется изменением зазора 5 с помощью магнитопровода 2, а также поворотом рамки по отношению к нейтрали NN при неизменном положении сочленения входного преобразователя с сердечником. Обмотка смещения используется в ферродинамических преобразователях Для преобразований соотношений.
Принципиальная схема измерительного комплекта передачи показаний на расстояние с ферродинамическими преобразователями приведена на рис. 9-19.
Измеряемая величина х воздействует на положение; рамки ферродинамического преобразователя ФП1 и вызывает7 в ней ЭДС пропорциональную измеряемой величине. Эта ЭДС поступает по линии связи на компенсирующий ферродинамиче-ский преобразователь ФП2 вторичного прибора. Обмотки возбуждения обоих преобразователей включены последовательно а рамки ФП1 и ФП2 — встречно, так что ЭДС рамок образует разницу АЕ=Ег—Е2. Разница попадает на вход электронного усилителя и далее на реверсивный двигатель М. Последний че-
ФП1 фП2
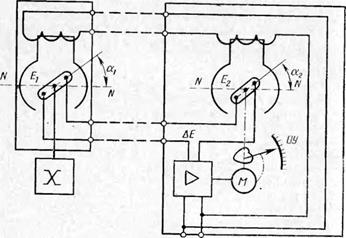
Рис. 9-19
рез лекало или кулачок поворачивает рамку вторичного прибора до тех пор, пока ЭДС первой рамки не будет скомпенсирована, т. е. Д£=0 (точнее, порогу чувствительности электронного усилителя). Одновременно реверсивный двигатель перемещает указатель и производится регистрация измеряемой величины X.
Аналогично работают комплекты дифференциально-трансформаторных датчиков с ферродинамическими приборами.
К недостаткам ферродинамических преобразователей и передач следует отнести сравнительно небольшой угол поворота, на который может быть повернута рамка.
В ферродинамических приборах со встроенными выходными преобразователями одновременно с перемещением рамки ФП2 изменяются положения подвижных систем выходных преобразователей ферродинамического, струнного или пневматического.
Устройство последних преобразователей аналогично устройству преобразователей, рассмотренных в начале главы. Выходные преобразователи позволяют сопрягать ферродинамический измерительный комплект с электрическими и пневматическими элементами автоматики и вычислительной техники.
В комплекте агрегатных электрических средств контроля и регулирования АСКР-ЭЦ, предназначенном для контроля, регулирования и управления непрерывными технологическими процессами, имеется набор средств, унифицированных по информационным, энергетическим и конструктивным характеристикам и позволяющих создать автономные системы контроля (и управления). Эти системы дают возможность осуществлять: непрерывное измерение текущих значений параметров с помощью одно-, двух- и трехканальных регистрирующих приборов; циклический сбор, измерение и кодирование информации; непрерывную и циклическую сигнализацию отклонения параметров от нормы; регистрацию в цифровой форме текущих значений параметров через фиксированные временные интервалы и в момент их отклонений от нормы; косвенные измерения и др.
Для работы с аналоговыми датчиками (термоэлектрическими термометрами, термометрами сопротивления, с выходными сигналами в виде напряжения, дифференциально-трансформаторными датчиками и датчиками ГСП) предназначены следующие средства измерения:
устройства коммутации сигналов датчиков (типа А206-01) для 32 датчиков;
блоки представления информации (типа БА11-001—006), в которых приводятся значения параметров, знак, порядок, размерность и адрес параметров;
аналоговые показывающие одношкальные приборы (А501) щитового, стоечного или настольного исполнения (основная погрешность ±1 %)",
аналоговые показывающие и регистрирующие одно- (А541), двух- (А542) и трехканальные (А543) приборы, у которых погрешность измерения составляет ±0,5 %, записи ±1 %, а исполнение щитовое, стоечное и настольное;
аналоговые показывающие многоканальные приборы (А511) Для восьми параметров с тем же конструктивным исполнением и основной погрешностью +0,5%;
аналоговые вычислительные устройства (А343), позволяющие производить сложение, вычитание, умножение, деление, возведение в степень для 10 входных сигналов;
устройства аналого-цифрового преобразования (А328-18) для аналоговых сигналов 0—10 В при числе каналов от 16 до 16X16=256;
установки непрерывного избирательного контроля и позиционного регулирования (А 761-05) для непрерывного измере-
ния, сигнализации и записи на аналоговых устройствах, представление информации на мнемосхемах для 16 датчиков;
установки централизованного контроля технологических параметров (А 701-03) для циклической сигнализации отклонений, цифровой регистрации параметров и отклонений и выдачи информации на УВКМ-6000.
Входными сигналами этих средств являются сигналы перечисленных выше датчиков, а выходные сигналы электрические: по постоянному току 0—10 В и кодовые. Быстродействие аналоговых приборов 2,5 с.
Дата добавления: 2015-06-22; просмотров: 912;