ДЕФОРМАЦИОННЫЕ МАНОМЕТРЫ 13 страница
В качестве преобразователя скорости вращения в частоту могут использоваться любые электрические преобразователи, способные отмечать полные или дольные значения оборотов валов. К ним относятся емкостные (контактные и бесконтактные), индуктивные, индукционные, электретные, оптические, радиоизотопные типы датчиков. Измерительными приборами частотных датчиков скорости являются цифровые или аналоговые частотомеры. Принципы устройства различных типов частотных датчиков тахометров и их функции преобразования приведены в табл. 8-1.
10* 291
Типы и принципы устройства частотных датчиков тахометров
Функция преобразовании частотных датчиков
Типы и принципы устройства частотных датчиков тахометров
Функция преобразования частотных датчиков
 |  |  |
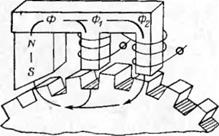
Индукционные
где /—выходная частота напряжения постоянного тока или тока повышенной частоты; р — число пар полюсов или число стальных зубцов; п — число оборотов объекта в секунду
Электретные
f~knt
где k — число электретов на окружности вращающейся части
 |  |
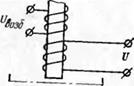
Индукционные модуляторные (с посторонним возбуждением)
| w ■ |
Индукционные с магнитной головкой

Амплитуда постоянного напряжения пропорциональна скорости. Амплитуда напряжения повышенной частоты не зависит от значения скорости вращения
f = nf
где / — выходная частота напряжения постоянного тока или тока повышенной частоты; п — число оборотов объекта в секунду
где N — число периодов синусоидальных или импульсных колебаний на окружности барабана; /—выходная частота напряжения постоянного тока или тока повышенной частоты; п — число оборотов объекта в секунду
Индуктивные
Взаимоиндуктивные
Емкостные контактные
/ = тп, где т — число зубцов стальных дисков
Амплитуда выходного напряжения не зависит от скорости вращения
где N — число периодов П-образных импульсов или пар зубцов диска
Продолжение
Пр од ол ж е н ие
Типы и принципы устройства частотных датчиков тахометров
Функция преобразования частотных датчиков
Типы и принципы устройства частотных датчиков тахометров
Функция преобразования частотных датчиков
Емкостные бесконтактные
^Радиоизотопныи
| |  |
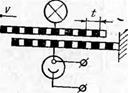
Фотоэлектрический оптический с прорезными отверстиями
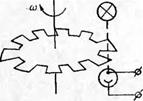
Фотоэлектрический оптический с зубчатым диском
Фотоэлектрический оптический с разными коэффициентами отражения
где поступательная скорость движения рейки; А/ — длина отверстия с перемычкой
/ —- тп, i где т — число зубцов диска (с разными коэффициентами отражении)
Часто в датчиках тахометров используются емкостные и индуктивные преобразователи (см. в табл. 8-1), не имеющие особых преимуществ перед индукционными, кроме независимости амплитуды выходного сигнала от измеряемой скорости. В частности в ЦБП широко применяют индуктивные преобразователи для измерения скорости бумаго- и картоноделательных машин.
Схема частотного индуктивного тахометра типа ИТ-500 представлена на рис. 8-7. При вращении зубцы диска / проходят в рабочем зазоре сердечников 3 с катушками индуктивности 2, включенных в контур высокочастотного (1,8 МГц) генератора Г. При наличии зубца в зазоре резко ухудшается добротность контура за счет вносимых активных потерь и происходит срыв колебаний генератора. При выходе зубца из зазора колебания восстанавливаются.
Таким образом, определенной скорости чередования зубцов и впадин диска соответствует определенная частота модуляции добротности контура й частота следования «пачек» высокочастотных колебаний. Последние после усиления и детектирования в формирователе Ф в виде однополярных коротких импульсов измеряются частотомером Ч. Разрешающая способность датчика— 480 импульсов на оборот. При максимальной скорости 20 об/с, принятой для электропривода бумажкой машины К-15, он обеспечивает частоту следования выходных импульсов 9600 Гц.
Конструктивно катушки индуктивности контура генератора выполнены на двух ферритовых П-образных сердечниках <?, помещенных в текстолитовую обойму с прорезью, через которую при вращении проходит зубец диска В корпусе импульсного тахометра размещены также все элементы электрической схемы датчика, включая усилитель и формирователь Ф.
Время цикла измерения и индикации скоростей составляет 0,5—0,7 с при относительной приведенной погрешности измерения 0,01—0,02 %• Последняя определяется погрешностью квантования, которая составляет при отсчете =Ы импульс последней декады. Кроме того, в погрешность входит нестабиль-
ность кварцевого генератора, задающего время измерения, равная ±(10"3— ю-4)%.
В индуктивном датчике тахометра ИТ-500 предусмотрен режим работы с большим временем цикла измерения для получения усредненного отсчета скорости.
На основе датчиков типа ИТ-500 создан цифровой измеритель скорости типа ЦЙС-3 [5]. Он предназначен для измерения скорости, а также абсолютного и относительного значения разности скоростей вращения валов бумаго- и картоноделательных машин одновременно.
Технические характеристики ЦИС-3
С помощью фотоэлектрического датчика обрыва обеспечивается автоматическое отключение счетчика площади при обрыве полотна и автоматическое его включение после заправки полотна. Датчик среза и электромеханическое устройство, входящее в счетчик, предназначены для устранения повторного учета срезанного с рулона слоя дефектной бумаги.
При настройке счетчика корректируется только ширина рулонов, получаемых после резки, и не учитывается диаметр ведущих валов. С применением счетчика исключается операция вычисления площади полотна по пересчетным таблицам, в которых площадь определяется в зависимости от числа оборотов ведущего вала, его диаметра и ширины рулона.
Диапазон измеряемых скоростей, м/мин....................................................... .. О—999,9
Абсолютная погрешность измерения скорости, м/мин.............................. 0,1/0,2
Время цикла измерения скорости, с.............................................................. 3,5
в том числе время индикации, с................................................................. 2,8
Диапазон измеряемых абсолютных значений разности скоростей,
м/мин..................................................................................................................... ±102,4
Абсолютная погрешность измерения разности скоростей, м/мин . . 0,1
Время цикла измерения, с................................................................................ 0,84
в том числе время индикации, с................................................................. 0,77
Диапазон измеряемых относительных- значений разности скоро-
стей, %.................................................................................................................. ±10,24
Время цикла измерения (на максимальной скорости), с........................... 1,09
в том числе время индикации, с................................................................. 0,97
На измерении скорости вращения ведущих валов бумаго- и картоноделательных машин основаны специальные устройства для подсчета площади изготовляемого полотна, широко применяемые в ЦБП и называемые счетчиками метража полотна. По принципу действия, устройству и схемам измерительных цепей они аналогичны рассмотренным выше цифровым устройствам измерения скорости.
Основной трудностью при создании подобных приборов является учет проскальзывания полотна относительно ведущих валов, которое зависит от скорости движения, характеристик полотна и места установки датчиков (тахометров). Несмотря на недостатки (неоднозначность результатов отсчета) счетчиков указанного типа, последние довольно широко используются в ЦБП, поскольку принципы построения приборов для измерения скорости поступательного движения полотна (например, с помощью меток) пока не нашли применения в технических измерительных устройствах.
Структурная схема счетчика площади полотна (м2) приведена на рис. 8-8. От ведущего вала 1 с помощью фрикционной муфты 2 приводится во вращение бесконтактный индуктивный датчик 5, аналогичный по устройству рассмотренному индуктивному датчику ИТ-500. Он преобразует обороты вала в электрические импульсы, которые поступают через коммутационный блок 4 в счетное устройство 5. Со счетным устройством связаны цифровые индикаторы 6.
В счетчик входит датчик обрыва полотна 8, датчик среза полотна 7, а также пульт с блоками измерения, управления и цифровой индикации.
Глава 9
УСТРОЙСТВА ДИСТАНЦИОННЫХ ПЕРЕДАЧ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ
9.1. ОБЩИЕ СВЕДЕНИЯ. УНИФИЦИРОВАННЫЕ ПРЕОБРАЗОВАТЕЛИ
Для передачи измерительной информации на расстояния используются телеизмерительные устройства. Телеизмерительные устройства бывают ближнего, среднего и дальнего действия. В технологических производствах применяют, как правило, телеизмерительные устройства ближнего действия, иначе называемые устройствами дистанционных передач. С помощью этих устройств осуществляется передача измерительной информации на расстояния от нескольких десятков метров до 10—20 км.
Устройства передач измерительных сигналов в соответствии со структурной схемой рис. 2-1 содержат передающее устройство, линию связи индивидуальной передачи сигналов и приемное устройство.
Измерительный сигнал, получаемый на выходе первичного измерительного преобразователя, может быть достаточно унифицированным и удобным для передачи его на некоторое расстояние. Примером может служить передача от датчиков термометров электрического сопротивления и термоэлектрических термометров к соответствующим измерительным приборам. Однако в большинстве случаев первичные измерительные преобразователи имеют на выходе измерительные сигналы, которые нуждаются в дополнительном преобразовании с целью получения удобных унифицированных сигналов для передачи их по линиям связи к приемным устройствам — показывающим и самопишущим приборам. В этом случае после первичных измерительных преобразователей применяют унифицирующие преобразователи, которые преобразуют выходные измерительные сигналы в унифицированные сигналы для конкретных систем дистанционных передач (дифференциально-трансформаторной, ферродинамиче-ской) или в стандартный сигнал ГСП с целью передачи их по
линиям связи. Унифицирующие преобразователи могут быть конструктивно оформлены в единое целое с первичными преобразователями, составляя датчики, или в виде отдельных блоков— вторичных унифицированных измерительных преобразователей.
В комплектах устройств при передаче показаний на расстояния могут применяться унифицированные преобразователи для перехода от одной системы сигналов к другой, например от одной ветви ГСП, электрической, к другой, пневматической.
Большое количество общих технологических и теплоэнергетических величин, а именно: давление, перепад давлений (расход), плотность, уровень, вязкость, температура, скорость вращения и др., легко преобразуются в силу, линейное или угловое перемещение. В системе ГСП для измерения этих величин построены датчики с механической компенсацией измеряемой величины. Датчики состоят из первичного измерительного преобразователя измеряемой величины в силу, угловое или линейное перемещение и унифицированного измерительного преобразователя силы или перемещения для преобразования последних в стандартный пневматический или электрический сигнал. Устройство и характеристики первичных измерительных преобразователей технологических величин в силу или перемещение рассмотрены в соответствующих главах.
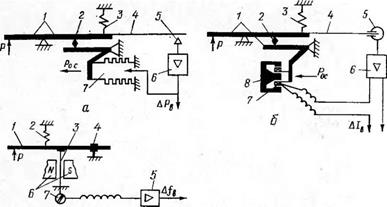
Унифицированные преобразователи силы или перемещения в стандартные сигналы ГСП могут быть построены по трем структурным схемам, которые представлены на рис. 9-1.
Схема (рис. 9-1,а), известная под названием компенсации перемещения, имеет на входе первичный измерительный преобразователь ПИП с выходной величиной в виде перемещения. В ПИП технологическая величина X преобразуется в силу Fx, а затем в перемещение 1Х или угол поворота ц>х. Преобразователь перемещения с обратной связью ИП имеет унифицированный сигнал давления Рв или тока /в.
В статической схеме (рис. 9-1,6) с силовой компенсацией измеряемую величину X, преобразованную в силу Fx (или момент Мх) первичным преобразователем, компенсируют усилием Foc (или моментом Мос), развиваемым в ИП цепью обратной связи. Вследствие статизма системы полное равенство Fx и Foc недостижимо, поскольку измеряемое усилие Fx частично тратится на преодоление сил трения и жесткости в системе.
Астатическая схема (рис. 9-1, б) с полной силовой компенсацией содержит интегрирующее звено #774 в прямой цепи преобразования ИП (примером такого звена может служить электродвигатель). При этом уравновешивание Fx усилием обратного преобразователя ОИП Foc происходит до порога чувствительности индикатора рассогласования ИП2.
В первой структурной схеме первичный измерительный преобразователь не охвачен обратной связью и все его погрешносТИ (нелинейности, гистерезиса, температурная) непосредственно войдут в погрешность датчика. В схеме с силовой компенсацией перемещения чувствительных упругих элементов, как правило, малы (что определяется статизмом системы), поэтому погрешности элементов не оказывают заметного влияния на погрешность датчика в целом. В астатической структурной схеме используется ряд дополнительных преобразователей, что усложняет конструкцию датчиков.
№
I
| ип |
| \jrn_ |
| PiJz 1 ИП |
life. а
| м,. |
| ИП |
| 'ос |
| Л- |
.л
ПИП
в
Рис. 9-1
В связи с этим в датчиках ГСП с силовой компенсацией применяется схема, изображенная на рис. 9-1,6. Другими словами, все датчики ГСП имеют конструктивно встроенный уравновешивающий преобразователь силы в стандартный электрический или пневматический сигнал. Эти преобразователи выпускаются отдельными блоками и могут быть использованы для перехода от одних физических величин к другим (из одной ветви ГСП в другую) с помощью дополнительных измерительных преобразователей. Рассмотрим устройство этих преобразователей.
Унифицированный пневмосиловой преобразователь. На рис. 9-2, а представлена принципиальная схема устройства пнев-мосилового преобразователя ГСП. Преобразователь имеет рычажную систему /, на которую действует усилие Р, пропорциональное измеряемой величине. Это усилие уравновешивается через корректор 2 усилием сильфона Рос, реализующего обратную связь. При измерении Р незначительное перемещение рычага 1 вызывает изменение положения заслонки 4. Последняя входит в систему сопло — заслонка 5, являющуюся индикатором рассогласования в этом уравновешенном преобразователе. При перемещении заслонки 4 изменяется давление сжатого воздуха, поступающего в пневматический усилитель 6. После усилителя воздух поступает в сильфон обратной связи 7 и одновременно в линию дистанционной передачи. Усилие обратной связи Рос уравновешивает входное усилие Р до тех пор, пока не наступит равновесие сил, действующих на рычаг /.
д Рис. 9-2
Унифицированный электросиловой преобразователь. Этот преобразователь (рис. 9-2, б) устроен аналогично пневматическому. Флажок 4, связанный с рычажной системой /, входит в дифференциально-трансформаторный преобразователь 5, используемый в качестве индикатора рассогласования. При изменении силы Р на выходе индикатора появляется напряжение переменного тока. Напряжение подается на вход электронного усилителя 6. Выходной сигнал постоянного тока после усилителя поступает в линию дистанционной передачи и в последовательно соединенную обмотку рамки 7 магнитоэлектрического преобразователя 8, который развивает усилие обратной связи Poc = kl (или для ферродинамического преобразователя P0C = kIz), действующее на рычажную систему 1 до тех пор, пока флажок 4 не примет первоначального положения.
Настройка чувствительности пневмосилового и электросилового преобразователей производится перемещением корректора 2, что изменяет передаточное отношение рычажной системы, а установка нуля при помощи пружины корректора нуля 3, определяющей начальное усилие.
Унифицированный частотно-силовой преобразователь (рис. 9-2,в)- Он имеет рычаг 1, на который воздействует измеряемое усилие Р. Перемещаясь, рычаг натягивает струну 3, являющуюся измерительным преобразователем силы (перемещения) в частоту.
Струнный преобразователь представляет собой немагнитную плоскую струну 3, помещенную в поле постоянного магнита 6. Один конец струны укреплен на подвижном рычаге 1, а другой в специальном устройстве 7, которое предназначено для регулирования первоначального натяга струны, но длина струны / остается постоянной. Струна изготавливается из кобальто-вольфрамовых сплавов с плоским сечением (отношение толщины к ширине принимается равным 1 : 10), и с длиной, в 800— J000 раз превышающей исходный диаметр провода. В качестве струны часто используют растяжки для электроизмерительных механизмов. Частота собственных поперечных колебаний струны
' 2 V ml 21 V Р 2 V Pls '
где F, с, Д I — сила натяга, механическая напряженность, удлинение струны соответственно; m, I, р, Е — масса, длина, плотность и модуль упругости материала струны соответственно.
Для возбуждения механических колебаний струны и преобразования их в частоту переменного электрического тока используется магнитоэлектрический обратимый преобразователь, состоящий из струны и постоянного магнита 6. Струна включена в цепь обратной положительной связи, охватывающей электронный усилитель 5. Ток от усилителя, проходя по струне, взаимодействует с полем постоянного магнита и развивает усилие, перемещающее струну. Струна начинает двигаться и в ней наводится ЭДС пропорциональная активной длине струны (длине магнита), скорости ее движения в магнитном поле и магнитной индукции поля. ЭДС струны является входным сигналом усилителя 5. Частота переменного электрического тока в контуре этой замкнутой системы, называемой струнным генератором, .определяется собственной резонансной частотой струны, которая пропорциональна УР. Пределы изменения выходного сигнала 1500—2500 Гц. Начальное значение частоты (1500 Гц) устанавливается натяжением струны с помощью пружин 2 и устройства 7, а изменение чувствительности достигается установкой определенного отношения плеч рычага 1 путем изменения его длины в опоре 4. Усилитель смонтирован под общим кожухом с преобразователем. Выходной сигнал может передаваться на расстояние до 10 км и более с помощью двухжильного кабеля.
Унифицированные преобразователи для датчиков с выходным сигналом в виде ЭДС или сопротивления. Для наиболее распространенных датчиков разработан ряд унифицированных измерительных преобразователей, осуществляющих преобразования выходных сигналов датчиков в унифицированные или стандартные сигналы.
Такими унифицированными преобразователями для термоэлектрических термометров и датчиков с выходным сигналом в виде напряжения являются преобразователи типа ПТ-ТП-68 и НП-ТЛ1. Они основаны на статической компенсации входного сигнала суммой напряжений: напряжения разбаланса измерительной мостовой цепи и напряжения цепи обратной связи. He-скомпенсированная часть входного напряжения усиливается усилителем постоянного тока по схеме модулятор — усилитель переменного тока — демодулятор. Выходной ток усилителя используется для выходного сигнала и реализации глубокой отрицательной обратной связи по току с целью стабилизации функции преобразования входного напряжения в выходной ток. При помощи кусочно-линейной аппроксимации обеспечивается линейная зависимость между измеряемой температурой и выходным токовым сигналом 0—5 мА (см. гл. 10, рис. 10-8).
Выход и вход гальванически разделены, поэтому в этих преобразователях допускается одновременное заземление электрода термопары и выходной цепи. Преобразователи надежно работают при наличии наводок переменного тока во входной цепи, что позволяет не экранировать линию связи между термопарой и преобразователем.
Кроме того, промышленностью стали выпускаться преобразователи ТЭДС и ЭДС в частоту электрических импульсов типа ПНС-Т. Они отличаются от описанных выше тем, что не-скомпенсированная часть входного напряжения постоянного тока усиливается, преобразуется в переменное напряжение и подается на управляемый генератор. Выходная частота генератора поступает на преобразователь обратной связи для компенсации выходным сигналом обратной цепи входного переменного напряжения и одновременно на выходное устройство. Последнее представляет собой импульсный трансформатор, выдающий два гальванически развязанных выходных сигнала переменной частоты. Диапазон изменения частот от 4 до 8 кГц, а амплитуда напряжения составляет 1,2±0,36 В. Частотный выходной сигнал связан с температурой линейной зависимостью.
Для термометров электрического сопротивления используются унифицированные преобразователи типа ПТ-ТС-68 и НП-СЛ1, также работающие на основе метода уравновешивающего преобразования (см. гл. 10, рис. 10-8 и 10-9). Термометр сопротивления включается в одно из плеч неравновесной равноплечей измерительной мостовой цепи, выходное напряжение разбаланса которой уравновешивается напряжением цепи обратной связи. Неуравновешенная часть напряжения усиливается усилителем постоянного тока с токовым выходом от 0—5 мА, Одновременно усиленный сигнал поступает на обратный преобразователь для компенсации входного напряжения разбаланса моста. Эти измерительные преобразователи осуществляют линейное преобразование изменения сопротивления в выходной сигнал.
Подключение термометров сопротивления к преобразователям типа ПТ-ТС-68 и НП-СЛ1 осуществляется по трехпровод-* ной схеме (см. 9.2). Экранирование линий связи датчика с преобразователем не требуется.
Преобразователи электрического сопротивления в частоту электрических импульсов типа ПНС-Р аналогичны по устройству и характеристикам преобразователям ПНС-Т. Ими осуществляются линейные преобразования значений температуры, измеренной термометром электрического сопротивления, в частотный сигнал от 4 до 8 кГц. На вход этих преобразователей подключаются термометры сопротивления по трехпроводной схеме. На выходе имеются по две раздельные выходные цепи для получения частотных сигналов.
Для комбинированных систем передача измерений на расстояния и преобразования измерительной информации ведутся устройствами с различными физическими измерительными сигналами и источниками питания. При переходе от одного измерительного сигнала к другому для унифицированных или стандартных сигналов необходимы различного рода смешанные преобразователи. Электропневматические аналоговые, пневмо-электрические аналоговые и т. д. преобразователи позволяют перейти от одного стандартного сигнала к другому, т. е. связать между собой стандартные ветви ГСП. Рассмотрим смешанные преобразователи, нашедшие наиболее широкое применение в системах измерения и автоматического управления для целлюлозно-бумажного производства.
Электропневматический преобразователь. На рис. 9-3 изображен преобразователь типа ЭПП-63, предназначенный для преобразования сигнала постоянного тока 0—5 мА в стандартный пневматический сигнал 0,02—0,1 МПа. Постоянный ток, проходя по катушке 1, укрепленной на основном рычаге 5, и взаимодействуя с магнитным полем магнита 2, создает усилие, перемещающее систему рычагов 5 и 7, соединенных гибкой тягой 8. При этом изменяется зазор между соплом 4, укрепленным на рычаге 5, и заслонкой 3, что вызывает изменение давления в камере А. Нарушается равновесие дифференциальной мембраны 9 и положение штоков, жестко связанных с мембраной, что изменяет степень открытия клапана 11. Давление в камере Б и в сильфоне обратной связи 6 изменяется до тех пор, пока система рычагов не придет в первоначальное положение, что будет соответствовать новым значениям перепада давлений на постоянных дросселях 10 и 12. Выходной сигнал передается на расстояние до 300 м, основная допускаемая погрешность не превышает у = ± 1 ,%.
В качестве аналоговых электропневматических преобразователей могут быть использованы также ферродинамические функциональные преобразователи (типа ПФФ) или дифференциально-трансформаторные устройства с преобразованием в пневматический стандартный сигнал. При этом датчик воздействует на изменение взаимоиндуктивности ферродинамичес-
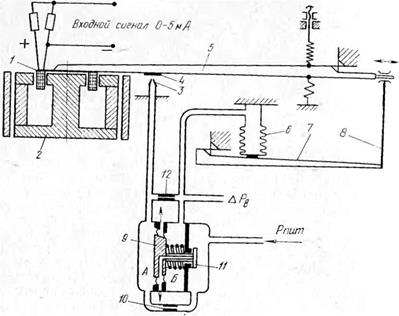
Рис. 9-3
ких или дифференциально-трансформаторных преобразователей, а функциональная зависимость определяется профилем кулачка [1].
Дискретный электропневматический преобразователь. Предназначен он для преобразования восьмиразрядного двоичного кода (поступающего от ЭВМ) в пневматический стандартный сигнал 0,02—0,1 МПа. Управление преобразователем осуществляется от вычислительной машины. Принцип действия преобразователя основан на суммировании расходов воздуха, проходящего через параллельно включенные дроссели с различными условными проходными сечениями при постоянном перепаде давления на них. При этом предусматривается автоматический сдвиг начальной точки диапазона преобразования. Преобразователь состоит из семи регулируемых дросселей, настроенных
ак, что их условные проходные сечения относятся, как 1:2:4: I g ; 16:32 :64, электропневмопреобразователей, отключающих или подключающих разрядные дроссели, следящей системы ну-евого опорного давления и схем автоматического сдвига начала преобразования. Пневматическая часть преобразователя выполнена на базе УСЭППА. Основная погрешность у= ± 1,5 ,%.
| 77777т№ |
 |
Пневмоэлектрический преобразователь. Схема устройства такого преобразователя типа ПЭ-55М приведена на рис. 9-4. Он служит для преобразования стандартного пневматического сигнала в электрический сигнал постоянного тока.
Рис. 9-4
Манометрическая трубчатая одновитковая пружина / преобразует стандартное давление в усилие, воздействующее на рычаг 2, на котором с другой стороны укреплен медный диск 3. Этот диск находится в высокочастотном поле плоской катушки 4 и, перемещаясь, изменяет ее индуктивность, а также постоянную составляющую выходного тока LC-генератора 5. Выходной ток протекает по катушке 7 обратного магнитоэлектрического преобразователя и, взаимодействуя с постоянным магнитом 8, развивает в катушке усилие, воздействующее на рычаг До тех пор пока не наступит равновесия сил. В блоке 6 расположены электрические цепи для питания генератора, фильтрации и смещения выходного тока, а также для проверки исправности элементов преобразователя. Для передачи измерительных сигналов на расстояние необходима линия связи.
Дата добавления: 2015-06-22; просмотров: 1466;