Способ задания движения.
Задать движение точки по отношению к избранной системе отсчета – это значит указать способ, при помощи которого можно определить положение точки в любой момент времени.
Существуют три способа задания движения:
1. Векторный способ.
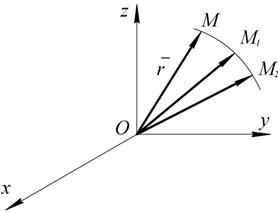 Положение точки в пространстве однозначно определенном заданием радиуса – вектора
Положение точки в пространстве однозначно определенном заданием радиуса – вектора  , проведенного из некоторого неподвижного центра О в данную точку М.
, проведенного из некоторого неподвижного центра О в данную точку М.
Для определения движения точки нужно знать, как изменяется с течением времени , то есть должна быть известна функция
Рис. 2.1
 . (1)
. (1)
Годографом какого-либо вектора называют кривую, которую вычерчивает конец этого вектора при изменении его аргумента (предполагается, что начало вектора, находится в одной и той же точке).
Таким образом, годографом радиус – вектора является траектория точки.
2. Координатный способ.
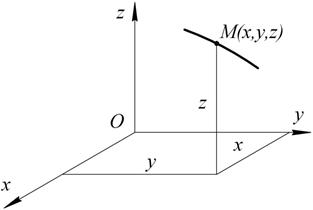 Положение точки М в системе координат ОХУ определяется координатами х, y, z.
Положение точки М в системе координат ОХУ определяется координатами х, y, z.
При движении точки М ее координаты изменяются с течением времени. Следовательно, координаты х, y, z движущейся точки, являются функциями времени
Рис. 2.2
 (2)
(2)
Эти уравнения называются уравнениями движения точки в декартовых координатах.
Пусть движение точки М в плоскости задано уравнениями:

Из первого уравнения выразим время  и подставим во второе:
и подставим во второе:  – полученная зависимость есть уравнение траектории точки.
– полученная зависимость есть уравнение траектории точки.
3. Естественный способ задания движения.
Этот способ применяется в том случае, если траектория точки заранее известна.
Выберем на траектории неподвижную точку О, которую назовем началом отсчета дуговой координаты. 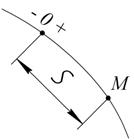 Положение точки М на траектории будем определять дуговой координатой S, отложенной на траектории от начала отсчета О. Расстояния, отложенные в одну сторону от точки О, будем считать положительными, в другую – отрицательными, то есть установим
Положение точки М на траектории будем определять дуговой координатой S, отложенной на траектории от начала отсчета О. Расстояния, отложенные в одну сторону от точки О, будем считать положительными, в другую – отрицательными, то есть установим
Рис. 2.3 направление отсчета дуговой координаты. При движении
точки М расстояние S от этой точки до неподвижной
точки О изменяется с течением времени:
 – уравнение движения т. М (3)
– уравнение движения т. М (3)
2.2. Скорость точки.
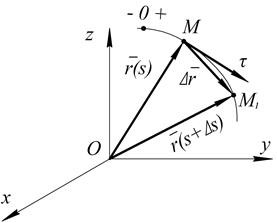
1. Векторный способ задания движения.
Пусть в момент времени  положение точки М определяется
положение точки М определяется  , а в момент
, а в момент  .
.
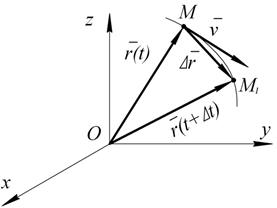
Рис. 2.4
Вектор  будем называть вектором перемещения точки за время
будем называть вектором перемещения точки за время  . Отношение
. Отношение  к ,называется средней скоростью за промежуток времени
к ,называется средней скоростью за промежуток времени
 (4)
(4)
Скоростью точки в данный момент времени называется предел отношения вектора перемещения точки к промежутку времени, за которое произошло это перемещение, при стремлении этого промежутка времени к нулю
 (5)
(5)

Скорость точки – это вектор, направленный по касательной к траектории в сторону движения.
2. Координатный способ задания движения.
Пусть движение точки задано

Тогда для радиуса – вектора точки М можно записать
 , (*)
, (*)
где  – единицы орты осей х, y, z.
– единицы орты осей х, y, z.
Согласно (5)  .
.
Дифференцируем (*)
 . (**)
. (**)
С другой стороны для вектора  справедливо соотношение
справедливо соотношение
 , (***)
, (***)
где  – проекции на оси х, y, z.
– проекции на оси х, y, z.
Сравнивая (**) и (***), получим
 (6)
(6)
Модуль скорости точки
 (7)
(7)
Направление скорости определяется направляющими косинусами:
3. Естественный способ задания движения.
Пусть в момент времени t положение точки М определяется координатой S, в момент  –
– 
Согласно (5)
 (*)
(*)
Вычислим модуль и определим направление  :
:


Вектор  направлен так же, как
направлен так же, как  .
.
Рис. 2.5
При направлении этого вектора стремится к направлению касательной к траектории в точке М.
Обозначим единичный орт касательной через 
 ,
,
Таким образом  , следовательно
, следовательно  , так как
, так как  .
.
Равенство (*) примет вид:
 (8)
(8)
Модуль  , направление совпадает с
, направление совпадает с  .
.
2.3. Ускорение точки.
1. При векторном способе задания движения.
Предположим, что в момент времени скорость точки  , а в момент
, а в момент  .
.
Предел приращения скорости к приращению времени за которое произошло это приращение, при условии, что , называется ускорением точки в данный момент времени.
 (9)
(9)
2. При координатном способе задания движения.
Вектор скорости точки
 .
.
С учетом (9)
 (*)
(*)
Но для вектора ускорения точки имеем
 (**)
(**)
Сравнивая (*) и (**), получим 
 (10)
(10)

Модуль ускорения точки
 . (11)
. (11)
Направление вектора ускорения определяется направляющими косинусами:
3. При естественном способе задания движения.
Пусть известна траектория точки.
Возьмем две близкие на траектории точки М и М1 –  .
.
Вектор  перенесем в точку М и проведем плоскость через . Эта плоскость, называется соприкасающейся плоскостью.
перенесем в точку М и проведем плоскость через . Эта плоскость, называется соприкасающейся плоскостью.
Плоскость перпендикулярная соприкасающейся, называется нормальной плоскостью. Плоскость перпендикулярная нормальной и соприкасающейся плоскостям называется спрямляющей плоскостью.
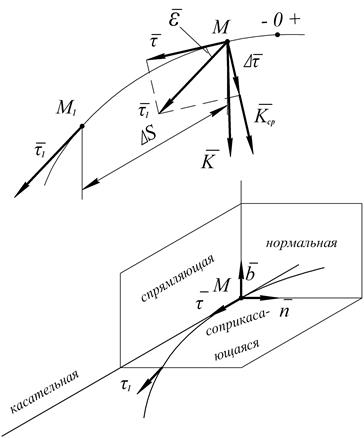
Рис.2.6
Три взаимно перпендикулярные плоскости:
нормальная, соприкасающая и спрямляющая образуют естественный трехгранник.
Линия пересечения нормальной и соприкасающейся плоскостей называется главной нормалью. Орт главной нормали –  . Линия пересечения нормальной и спрямляющей плоскостей называется бинормалью траектории. Ось бинормали
. Линия пересечения нормальной и спрямляющей плоскостей называется бинормалью траектории. Ось бинормали  .
.
Три взаимно перпендикулярные оси: касательная, направленная в сторону возрастания дуговой координаты; главная нормаль, направленная в сторону вогнутости траектории; бинормаль, направленная по отношению к  также, как ось z по отношению к осям х, y, называются естественными осями.
также, как ось z по отношению к осям х, y, называются естественными осями.
Угол между касательными в двух ближайших точках траектории называется углом смежности  .
.
Кривизной кривой в точке М называется предел отношения угла смежности к абсолютному значению длины дуги ММ, между ближайшими точками траектории
 (12)
(12)

Радиусом кривизны в точке М называется величина, обратная кривизне:
 . (13)
. (13)
Получим формулу для вычисления ускорения точки М. Согласно выражению (8) имеем:
 .
.
Продифференцируем по времени обе части этого равенства
 (*)
(*)
Вычислим  .
. 
Так как направление по главной нормали, то  .
.
Подставим в (*)
 ,
,
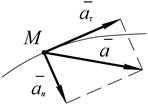
Ускорение точки лежит в соприкасающейся плоскости и определяется как векторная сумма касательного и нормального ускорений точки:
 . (14)
. (14)
Проекция ускорения на касательную определяется формулой:
 . (15)
. (15)
Касательное ускорение характеризует изменение скорости по величине. Оно равно нулю, когда величина скорости остается неизменной. Кроме того, оно обращается в нуль в те моменты времени, когда скорость достигает экстремальных значений.
Величина нормального ускорения определяется формулой:
 , (16)
, (16)
где  – радиус кривизны.
– радиус кривизны.
Нормальное ускорение характеризует изменение скорости по направлению. Оно равно нулю при прямолинейном движении точки, а также в точках перегиба траектории, так как в обоих случаях радиус кривизны обращается в бесконечность. Кроме того,  в точках где V=0.
в точках где V=0.
 Модуль ускорения вычисляется по формуле:
Модуль ускорения вычисляется по формуле:
 . (16)
. (16)
Рис. 2.7
Направление ускорения: 
Некоторые частные случаи движения точки.
1. Прямолинейное движение
 .
.
Так как при прямолинейном движении скорость изменяется только численно, то делаем вывод, что касательное ускорение характеризует изменение скорости по численной величине.
2. Равномерное криволинейное движение
Равномерным называется такое движение, в котором численная величина скорости остается все время постоянной (  ):
):
Так как ускорение при равномерном движении появляется в результате изменения направления скорости, то нормальное ускорение характеризует изменение скорости по направлению. Получим закон движения.
Отсюда:  .
.
Проинтегрируем: 
Подставим пределы интегрирования: 
В результате получим закон равномерного криволинейного движения:

3. Равномерное прямолинейное движение


следовательно, 
4. Равнопеременное криволинейное движение
Равнопеременным называется такое криволинейное движение, при котором касательное ускорение остается величиной постоянной:

 , проинтегрируем
, проинтегрируем

но  проинтегрируем
проинтегрируем
 – закон равнопеременного криволинейного движения.
– закон равнопеременного криволинейного движения.
Дата добавления: 2015-06-17; просмотров: 1107;