Особливості конструкції, вимоги, загальні співвідношення.
Асинхронні двигуни - найбільш поширений вигляд електричних машин, споживаючих в даний час близько 40% всієї електроенергії, що виробляється. Їх встановлена потужність постійно зростає.
Асинхронний двигуни широко застосовуються в приводах металообробних, деревообробних і інших видів верстатів, ковальсько-пресових, ткацьких, швацьких, вантажопідйомних, землерийних машин, вентиляторів, насосів, компресорів, центрифуг, в ліфтах, в ручному електроінструменті, в побутових приладах і так далі. Практично немає галузі техніки і побуту, де не використовувалися б асинхронні двигуни.
Низьковольтні асинхронні електродвигуни загального призначення потужністю 0,25...400 кВт, іменовані у всьому світі стандартні асинхронні двигуни, складають основу силового електроприводу, вживаного у всіх областях людської діяльності. Їх вдосконаленню в промислово розвинених країнах надають велике значення.
Провідні фірми-виробники випускають енергозбережні стандартні асинхронні двигуни потужністю 15-30 кВт і більше. У цих двигунах втрати електроенергії понижені не менше ніж на 10 % в порівнянні з раніше вироблюваними двигунами з "нормальним" ККД. Результати розрахунків показують, що додаткові витрати, пов'язані з придбанням енергозбережних електродвигунів, окупаються за рахунок економії електроенергії за 2-3 роки залежно від потужності двигуна. При цьому термін окупності потужніших двигунів менший, оскільки ці двигуни мають велике річне напрацювання і вищий коефіцієнт завантаження.
З енергозбереженням - зменшенням втрат в асинхронному двигуні - нерозривно зв'язано підвищення його ресурсу унаслідок зниження температури його обмоток. При використанні системи ізоляції класу нагрівостійкості F теоретичний ресурс системи ізоляції обмотки збільшується в 4 рази.
Питання електромагнітної сумісності (ЕМС) в даний час набувають все більшого значення при освоєнні і сертифікації нових серій електродвигунів. ЕМС електродвигуна визначається його здатністю в реальних умовах експлуатації функціонувати при дії випадкових електричних перешкод і при цьому не створювати недопустимих радіоперешкод іншим засобам.
В наш час в якості виконавчих двигунів змінного струму використовують переважно асинхронні двигуни.
Рис.10.1. Схема асинхронного виконавчого двигуна
За конструкцією асинхронні виконавчі двигуни являються двофазними (рис.10.1). Двигуни мають на статорі дві обмотки, зсунуті в просторі на 90 ел. град, одна з яких при роботі двигуна постійно знаходиться під напругою і називається обмоткою збудження ОЗ; на другу — обмотку керування ОК — напруга (сигнал) подається тоді коли необхідне обертання ротора. Від величини (або фази) напруги керування залежить обертовий момент, що розвивається ротором, частота обертання, а отже, і потужність на валу.
Для роботи асинхронних виконавчих двигунів необхідне обертове магнітне поле, яке створюється при зсуві струмів (напруг) обмоток збудження по фазі в часі. Найкращі енергетичні показники двигуни мають при круговому обертовому полі, яке отримується при зсуві струмів в обмотках на чверть періода (900) і рівності МРС обмоток.
Зсув струмів (напруг) в обмотках досягається: за рахунок спеціальних схем управління, використання фазообертачів і різноманітних перетворювачів або включення конденсаторів.
Регулювання частот обертання асинхронних виконавчих двигунів — керування двигунами — на практиці відбувається одним з трьох способів:
1) зміною величини (амплітуди) напруги керування при незмінній його фазі — амплітудне керування;
2) зміною фази напруги керування при незмінній його величині — фазове керування;
3) одночасною зміною амплітуди напруги керування і кута зсуву між векторами напруг керування і збудження — амплітудно-фазове керування.
Кожному способу керування відповідає своя схема ввімкнення виконавчого двигуна.
При амплітудному керуванні (рис.10.2, а) обмотка збудження ОЗ підключається до мережі з незмінною за величиною напругою  На обмотку керування ОК подається сигнал — напруга керування
На обмотку керування ОК подається сигнал — напруга керування  , зсунута схемою керування на 1/4 періода (900) відносно напруги збудження
, зсунута схемою керування на 1/4 періода (900) відносно напруги збудження  . Величину напруги керування
. Величину напруги керування  , яка в процесі регулювання змінюється за амплітудою, як правило, оцінюють ефективним коефіцієнтом сигналу aе, рівним відношенню напруги керування Uк до приведеної (до кількості витків обмотки керування) напруги збудження
, яка в процесі регулювання змінюється за амплітудою, як правило, оцінюють ефективним коефіцієнтом сигналу aе, рівним відношенню напруги керування Uк до приведеної (до кількості витків обмотки керування) напруги збудження 
 (32)
(32)
де k=wзkз/(wкkк) — коефіцієнт трансформації — відношення ефективного числа витків обмоток збудження і керування (як правило, kз=kк).
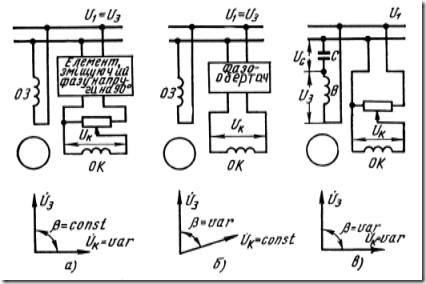
Рис.10.2. Схема керування асинхронними виконавчими двигунами
Кругове обертове поле при амплітудному керуванні має місце при aе=1, тобто коли приведені до однієї кількості витків напруги керування і збудження рівні за величиною. Напруга керування, яка відповідає цьому випадку, вважається номінальною. При всіх інших напругах керування поле двигуна еліптичне.
Реверс двигуна при амплітудному керуванні досягається шляхом зміни фази напруги керування на півперіода (1800).
При фазному керуванні (рис.10.2, б) на обмотку збудження, так як і при амплітудному керуванні, подається незмінна за величиною напруга мережі На обмотку керування подається постійна за величиною (амплітудою), але змінна за фазою напруга  , рівна приведеній напрузі збудження
, рівна приведеній напрузі збудження  .
.
Керування двигуном відбувається шляхом зміни фази напруги керування — зміною кута bміж векторами  і
і  . Величина сигналу керування, як правило, оцінюється коефіцієнтом сигналу, за який в цьому випадку приймається sinb.
. Величина сигналу керування, як правило, оцінюється коефіцієнтом сигналу, за який в цьому випадку приймається sinb.
При зсуві і по фазі на 900 (sinb=1) в двигуні, незалежно від режиму роботи, має місце кругове обертове поле. При коефіцієнтах сигналу sinb, більших нуля, але менших одиниці (1>sinb>0), поле двигуна стає еліптичним: при sinb=0 — пульсуючим; при sinb<0 ротор двигуна змінює напрямок обертання.
Амплітудно-фазове керування асинхронними виконавчими двигунами в схемах автоматики може бути здійснене двома шляхами:
1) в схемах, де напруга на обмотці збудження постійна (Uз=U1), — шляхом одночасної зміни як за величиною, так і за фазою напруги на обмотці керування Uк;
2) в конденсаторних виконавчих двигунах — шляхом зміни за величиною (амплітудою) напруги керування Uк.
Розглянемо детально другий випадок, який отримав найбільше розповсюдження.
В схемах автоматики, де напруга керування співпадає по фазі з напругою мережі
 , в яку ввімкнена обмотка збудження, для зсуву струмів в обмотках в часі послідовно з обмоткою збудження ОЗ, як правило, вмикають конденсатор С (рис.10.2, в).
, в яку ввімкнена обмотка збудження, для зсуву струмів в обмотках в часі послідовно з обмоткою збудження ОЗ, як правило, вмикають конденсатор С (рис.10.2, в).
В цьому випадку керування двигуном відбувається шляхом зміни за амплітудою напруги керування . З зміною напруги керування по величині як по величині, так і по фазі змінюється напруга безпосередньо на обмотці збудження. Напруга відрізняється від постійної за величиною і фазою напруги мережі на величину напруги на конденсаторі  . Останнє рівне добутку струму кола збудження
. Останнє рівне добутку струму кола збудження  , що змінюється при регулюванні , на реактивний опір конденсатора:
, що змінюється при регулюванні , на реактивний опір конденсатора:
 (33)
(33)
Конденсаторні виконавчі двигуни, як правило, розраховують так, щоб при номінальній напрузі керування Uк.ном і номінальній ємності конденсатора С в них мало місце кругове обертове поле в режимі пуску (при n2=0). В цьому випадку напруга Uк рівна приведеній до кількості витків обмотки керування напрузі  і зсунута за фазою відносно неї на 900. При цьому коефіцієнт сигналу керування вважається номінальним:
і зсунута за фазою відносно неї на 900. При цьому коефіцієнт сигналу керування вважається номінальним:
aе = Uк.ном/U1. (34)
Особливістю конденсаторного виконавчого двигуна являється те, що кругове обертове поле отримується тут лише в одному режимі роботи (режимі пуску) при визначеній напрузі керування (Uк.ном). В усіх інших режимах і при всіх інших значеннях Uк (крім Uк=0) поле еліптичне. При Uк=0 поле пульсуюче.
При всіх способах керування частота обертання асинхронних виконавчих двигунів змінюється за рахунок зміни (деформації) обертового магнітного поля. Якщо необхідно зменшити частоту обертання, змінюють коефіцієнт сигналу і магнітне поле з кругового перетворюється в еліптичне. При цьому відбувається зменшення прямого поля — прямого обертового моменту — і збільшення зворотного поля — зворотного (гальмівного) моменту, що приводить до зменшення частоти обертання.
Зміна характера магнітного поля шляхом зміни величини (або фази) напруги на обмотці керування дозволяє регулювати частоту обертання як в режимі холостого ходу, так і в режимі навантаження, чого не можна отримати при одночасній зміні напруг на обох обмотках, так як в цьому випадку при відсутності навантаження частота обертання n2=n1=const.
Недолік використовуваного в асинхронних виконавчих двигунах метода регулювання частоти обертання — його мала економність, що пояснюється великими електричними втратами в статорі і роторі через наявність зворотного поля.
В залежності від конструкції ротора асинхронні виконавчі двигуни можна поділити на двигуни:
1) з порожнистим немагнітним ротором;
2) з порожнистим феромагнітним ротором;
3) з звичайним ротором і короткозамкненою обмоткою, виконаною у вигляді білчиної клітки.
До асинхронних виконавчих двигунів пред’являються приблизно такі ж вимоги, як і до виконавчих двигунів постійного струму: у них повинен бути відсутній самохід, вони повинні мати широкий діапазон регулювання частоти обертання, малу інерційність і лінійність характеристик.
Дата добавления: 2015-06-17; просмотров: 1238;