ДИНАМИЧЕСКАЯ МОДЕЛЬ МАШИНЫ
Механизм машины обычно является многозвенной системой, нагруженной силами и моментами, приложенными к различным ее звеньям. Определение закона движения такой сложной многозвенной системы представляет собой трудную задачу.
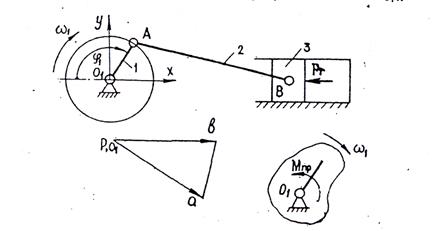
Рисунок 4.1. – Кинематическая схема механизма ДВС,
его план скоростей и динамическая модель
Рассмотрим в качестве примера кинематическую схему механизма ДВС (рисунок 4.1). К поршню 3 приложена движущая сила РГ, ко всем звеньям приложены силы тяжести. Также во всех кинематических парах действуют силы трения. Такой механизм имеет одну степень подвижности (W=1). Это значит что, прежде всего, необходимо определить закон движения только одного из звеньев, которое и будет являться начальным. Поэтому нужно лишь заменить весь сложный механизм одним условным звеном. При этом необходимо чтобы момент инерции Iпр и момент Мпр, которыми оно нагружено, были такими, что закон движения условного звена полностью совпадал с законом движения начального звена. Это значит, что условное звено окажется своеобразной динамической моделью механизма. Тогда будет справедливо уравнение для любого момента времени
ω1 = ωм, (4.1)
где ω1 – угловая скорость начального звена, ωм – угловая скорость модели.
Из сказанного следует, что при построении модели механизма все силы и моменты, приложенные к нему, оказываются приведенными к одному звену и замененными приведенным моментом Мпр. Также массы всех звеньев (точнее моменты инерции) оказываются также приведенными к одному звену и замененными приведенным моментом инерции Iпр. Сам же рассмотренный многозвенный механизм заменен простой динамической моделью (рисунок 4.1).
Дата добавления: 2015-06-01; просмотров: 2013;