Режими гальмування асинхронного двигуна
Асинхронний двигун забезпечує наступні режими гальмування:
1) Рекуперативне (генераторне) гальмування;
2) Гальмування противмиканням;
3) Динамічне гальмування;
4) Гальмування із самозбудженням.
1) Ознакою переходу в режим рекуперативного гальмування є більша за синхронну швидкість двигуна. Цей режим можна реалізувати в статичному режимі чи в перехідному процесі. У статичному режимі за допомогою зовнішнього активного моменту Мс робоча точка переміщується в II чи IV квадранти, рис.2.105.
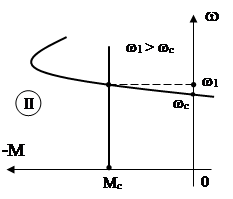 |
Рис.2.105.
У перехідному процесі двигун переходить у режим рекуперативного гальмування при зменшенні стрибком частоти живлення двигуна або при переключенні числа пар полюсів із більшої на меншу швидкість, рис.2.106.
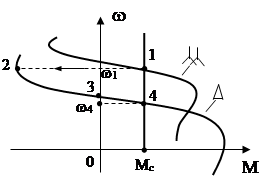 |
Рис.2.106.
В режимі рекуперативного гальмування двигун виробляє та повертає в мережу активну потужність, але при цьому продовжує споживати з мережі реактивну потужність. При частотному керуванні перетворювач повинен забезпечувати роботу в першому та другому квадрантах для нереверсивного ЕП та у всіх чотирьох для реверсивного.
3) Гальмування противмиканням у статичному режимі можна отримати тільки при активному статичному моменті для двигуна з фазним ротором. Для цього достатньо увімкнути в коло ротора додатковий резистор Rд із таким опором, щоб робоча точка перемістилася з першого в четвертий квадрант. Величина опору визначає швидкість w2 , з якою буде обертатися двигун в режимі гальмування противмиканням, рис.2.107.
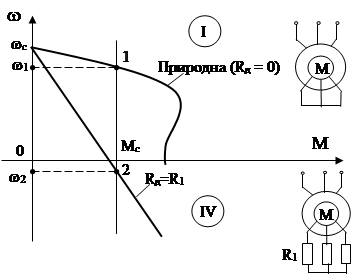 |
Рис.2.107.
При реактивному статичному моменті цей режим можна отримати тільки в перехідному процесі. Для гальмування механізму здійснюється реверс двигуна. Для обмеження при гальмуванні струму статора двигуна з короткозамкненим ротором у його коло можуть бути увімкнені додаткові резистори. Якщо двигун із фазним ротором, то на хід перехідного процесу та завдання початкового гальмівного моменту можна вплинути зміною додаткового опору Rд у колі ротора, рис.2.108.
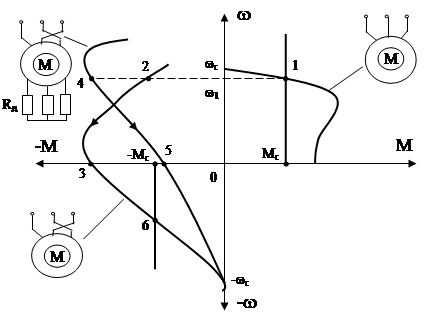 |
Рис.2.108.
На ділянці 2-3 механічної характеристики двигун буде сповільнюватися в режимі гальмування противмиканням. В точці 3 двигун потрібно відключити від мережі інакше він почне розганятись у зворотному напрямку, прямуючи до усталеної точки 6. Введення додаткового опору Rд у коло ротора дозволяє створювати умову, коли момент короткого замикання при зупинці в точці 5 буде меншим за статичний момент Мс, тому двигун не зможе розігнатися у зворотному напрямку й буде стояти під струмом. Його також потрібно відключити від живлення.
Перевагою гальмування противмиканням є створення значних моментів гальмування при низьких швидкостях. Недолік полягає у низькій енергетичній ефективності, так як двигун споживає електричну енергію з мережі та механічну від механізму й усю перетворює в тепло.
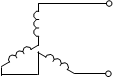
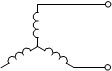
3) Для організації режиму динамічного гальмування потрібно джерело постійного струму. Обмотка статора працюючого двигуна відключається від мережі змінного струму і переключається на джерело постійного струму, рис.2.109.
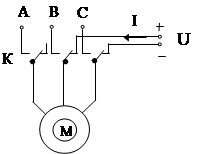 |
Рис.2.109.
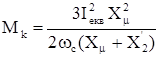
При обертанні ротора двигуна в постійному магнітному полі, яке створює обмотка статора, виникає гальмівний момент. Так як обмотка статора трифазна, то при підключенні до джерела постійного струму використовуються різні схеми з’єднання фаз обмотки, табл.2.3. При цьому постійний струм І, який протікає через обмотку статора, в залежності від схеми з’єднання відповідає еквівалентному змінному струмові, створюючи однакову за величиною магніторушійну силу. Цей еквівалентний струм визначає характерні точки механічної характеристики в режимі динамічного гальмування, а саме, критичний момент
 (2.118)
(2.118)
та критичне ковзання
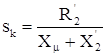 , (2.119)
, (2.119)
де Хm - індуктивний опір взаємоіндукції.
Таблиця 2.3.
| №, п/п | Схема | Струм Іекв | |||
| 
| ||||
| 
| ||||
| 
| ||||
| 
| ||||
| 
|


Так як опір Хm>>X1, то критичне ковзання (2.119) в режимі динамічного гальмування менше, чим в рушійному режимі (2.85), і відповідно жорсткість механічних характеристик буде більшою при однакових критичних моментах. Величину гальмівного моменту дуже просто задавати величиною постійного струму, так як критичний момент (2.118) пропорційний квадрату струму. При цьому критичне ковзання залишається незмінним (2.119). Якщо двигун із фазним ротором, то додатково на величину гальмівного моменту можна впливати введенням резистора Rд у коло ротора. Критичний момент залишиться незмінним, а збільшується критичне ковзання і відповідно зменшується жорсткість штучних механічних характеристик, які всі проходять через початок координат, рис.2.110. Після вмикання режиму гальмування з робочої точки 1двигун сповільнюється до зупинки при реактивному статичному моменті на ділянках характеристик 2-0, 3-0 чи 4-0 у залежності від величини струму чи додаткового опору в роторі. Якщо ж статичний момент активний, то після зупинки двигун почне розганятися в протилежному напрямку до нової робочої точки в четвертому квадранті.
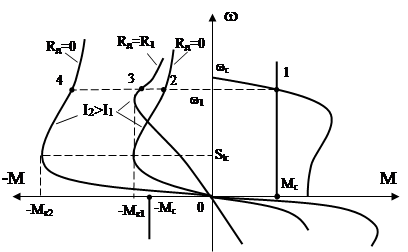 |
Рис.2.110.
Перевагою способу є простота керування гальмівним моментом, а недоліком – незначна величина гальмівного моменту при низьких швидкостях.
4) Гальмування із самозбудженням застосовується достатньо рідко. Воно основується на тому, що після відмикання двигуна від мережі магнітне поле в ньому затухає не миттєво. Це й використовується для створення гальмувального моменту. На практиці знайшли застосування конденсаторне та магнітне гальмування. При конденсаторному гальмуванні до обмотки статора підключаються конденсатори, з’єднанні в схему “зірка” чи “трикутник”, рис.2.111,а.
 |
а) Рис.2.111. б)
Конденсатори можуть бути увімкнуті постійно чи підключатися тільки на час гальмування. Із збільшенням ємності конденсаторів збільшується гальмівний момент, а штучні механічні характеристики зміщуються в область низьких швидкостей, рис.2.111,б.
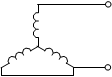
При магнітному гальмуванні виводи обмотки статора зразу закорочуються після відключення від мережі, рис.2.112. При цьому створюється дуже короткочасний гальмівний момент.
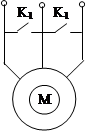 |
Рис.2.112.
При використанні регульованого електропривода з перетворювачем частоти чи регулятором напруги з’являються додаткові можливості для організації ефективного гальмування за рахунок комбінації різних способів та підтримки заданого моменту гальмування.
2.2.1.4. Динамічні властивості асинхронного двигуна
Асинхронний двигун є суттєво нелінійною ланкою. Для повного аналізу використовуються складні математичні моделі та ЕОМ. За умови не насичення магнітного кола двигуна, симетричності фаз найчастіше використовуються еквівалентна двофазна модель двигуна у векторному вигляді. Найбільш спрощена модель може бути отримана при лінеаризації робочої ділянки механічної характеристики двигуна прямою. Цьому відповідає робота двигуна при збільшенні та зменшенні навантаження, а також пуск двигуна з фазним ротором при додатковому опорі в колі ротора, тобто коли робоча точка не виходить за межі робочої ділянки характеристики. Ця модель не адекватно описує процес пуску та реверсу двигуна двигуна з короткозамкненим ротором. Живлення обмотки статора може здійснюватися від джерела напруги чи струму:
1) При живленні від джерела напруги процес в електромеханічному перетворювачі описується наступним рівнянням
 , (2.120)
, (2.120)
де  - електромагнітна стала часу;
- електромагнітна стала часу;
де  - модуль жорсткості робочої ділянки механічної характеристики.
- модуль жорсткості робочої ділянки механічної характеристики.
Для стандартної частоти f1=50 Гц електромагнітна стала часу лежить в межах Те=0,006¸0,06 с. Менші значення відповідають двигунам меншої потужності. Як видно, електромагнітна стала асинхронного двигуна менша за електромагнітну сталу двигуна постійного струму, тому електромагнітні процеси в АД протікають швидше. На основі рівняння (2.120) складається передаточна функція електромеханічного перетворювача асинхронного двигуна, яка представляє собою аперіодичну ланку

(2.121)
Після доповнення моделі (2.121) відомою передачною функцією механічної частини у вигляді одномасової схеми отримується структурна схема асинхронного двигуна, рис.2.113.

Рис.2.113.
2) Живлення асинхронного двигуна від джерела струму найчастіше здійснюється від перетворювача частоти з інвертором струму, який формує
струм у фазах двигуна відповідно до сигналу завдання. Згідно до схеми заміщення фази двигуна на рис.2.73 на холостому ході весь струм статора І1 іде на створення струму намагнічування Іm. При збільшенні навантаження починає зростати струм ротора І2’, тому струм намагнічування зменшується. Таким чином струм ротора розмагнічує магнітне коло двигуна і магнітний потік змінюється в широких межах в залежності від ковзання. Це суттєво відрізняється від живлення джерелом напруги, коли магнітний потік залишається практично постійним. Критичне ковзання при живленні від джерела струму визначається наступною формулою
 . (2.122)
. (2.122)
Так як індуктивний опір взаємоіндукції набагато більший за індуктивний опір обмотки статора  , то критичне ковзання (2.122) при номінальному струмі статора І1н менше за критичне ковзання (2.85) при живленні від джерела напруги, і тому механічна характеристика в даному випадку жорсткіша за природну. Проте з цієї ж причини критичний момент двигуна
, то критичне ковзання (2.122) при номінальному струмі статора І1н менше за критичне ковзання (2.85) при живленні від джерела напруги, і тому механічна характеристика в даному випадку жорсткіша за природну. Проте з цієї ж причини критичний момент двигуна
 (2.123)
(2.123)
при номінальному струмі статора І1н менше критичного моменту на природній характеристиці, рис.2.114.

Рис.2.114.
Із збільшенням вище номінального струму статора і відповідно струму намагнічування Іm збільшується насичення магнітного кола двигуна та зменшується індуктивний опір взаємоіндукції хm , рис.2.115.

Рис.2.115.
При глибокому насиченні магнітний потік залишається незмінним та рівним потоку насиченню Ф=Фнас, що обумовлює критичний момент МкІнас>Мк
 (2.124)
(2.124)
та критичне ковзання skIнас>sk
 , (2.125)
, (2.125)
які більші, чим на природній характеристиці, рис.2.114. Таким чином із збільшенням насичення збільшується критичне ковзання на критичний момент двигуна. Для підтримки заданого магнітного потоку потрібно змінювати струм статора в залежності від ковзання двигуна.
Передаточна функція та структурна схема двигуна при живленні від джерела струму в загальному вигляді співпадають з аналогічними для випадку живлення від джерела напруги (рис.2.113), проте жорсткість характеристки b та електромагнітна стала часу Те мають більші значення при ненасиченому магнітному колі двигуна.
2.2.1.5. Керування асинхронним двигуном за мінімумом втрат електроенергії
Асинхронний двигун є основним споживачем електроенергії у світі, тому її раціональне використання є важливою задачею енергозбереження. Недоліком асинхронного двигуна є значне споживання реактивного струму при його не завантаженні, так на холостому ходу цей струм може складати 25-50% від номінального. Для зменшення втрат у простішому випадку необхідно змінювати напругу статора в залежності від навантаження, рис.2.116.

Рис.2.116.
Для кожної величинистатичного моменту існує точка, в якій струм статора є мінімальним. Пунктирна лінія з’єднує точки з мінімальним струмом Іmin при різних статичних моментах. Для керування за мінімумом струму двигун живиться від силового регулятора напруги, сигнал завдання якого формується за сигналами датчика струму та напруги обмотки статора. При частотному керуванні додатково можна впливати, змінюючи частоту напруги живлення. Існує багато алгоритмів, які підтримують максимальний ККД чи коефіцієнт потужності, мінімальний струм статора тощо у всьому діапазоні керування швидкістю чи в межах зміни навантаження. Найчастіше вказані алгоритми реалізуються за допомогою замкнених систем керування.
2.2.2. Електромеханічні властивості синхронного двигуна
Статор синхронного двигуна (СД) конструктивно аналогічний статору трифазного асинхронного двигуна. На роторі СД знаходиться обмотка збудження, яка живеться постійним струмом, рис.2.117. Потужність системи збудження складає 0,2-2 % потужності двигуна.

Рис.2.117.
Часто на валі синхронного двигуна встановлюється невеликий генератор постійного струму, який називається збуджувачем й призначений для живлення обмотки збудження. Майже завжди керування струмом збудження здійснюється за допомогою системи автоматичного керування так, як від його величини залежить коефіцієнт потужності та стійка робота двигуна. Додатково ротор має короткозамкнену обмотку, як в асинхронного двигуна, яка призначена для пуску та забезпечення стійкості двигуна. Ротор може виконуватися з явними чи неявними магнітними полюсами. В першому випадку двигун крім синхронного моменту додатково створює реактивний момент.
Синхронний момент двигуна дорівнює
 , (2.126)
, (2.126)
де хd – індуктивний електричний опір за повздовжньою віссю;
qел – електричний кут між векторами напруги та ЕРС.
Реактивний момент двигуна визначається формулою
 , (2.127)
, (2.127)
де хq – індуктивний електричний опір за поперечною віссю.
Формули (2.126) та (2.127) називаються кутовими характеристиками і є важливими залежностями синхронного двигуна. При збільшенні навантаження двигуна електричний кут між векторами напруги та ЕРС збільшується. При цьому вісь ротора відстає від осі магнітного поля статора на фактичний кут
 . (2.128)
. (2.128)
Якщо до двигуна прикладено зовнішній рушійний момент, то вісь ротора випередить магнітне коло на кут  і двигун перейде в режим синхронного генератора. Сумарна кутова характеристика двигуна з явними полюсами показана на рис.2.118.
і двигун перейде в режим синхронного генератора. Сумарна кутова характеристика двигуна з явними полюсами показана на рис.2.118.

Рис.2.118.
При проектуванні двигуна номінальний електричний кут, якому відповідає номінальний момент, задається в межах 
 , що забезпечує перевантажувальну здатність двигуна рівну
, що забезпечує перевантажувальну здатність двигуна рівну
 . (2.129)
. (2.129)
Синхронні двигуни спеціального виконання можуть мати перевантажувальну здатність у межах 3,5-4.
При роботі в усталеному режимі ротор двигуна обертається зі швидкістю магнітного поля
 , (2.130)
, (2.130)
тому механічна характеристика СД є абсолютно жорсткою, рис.2.119.

Рис.2.119.
Проте вона має місце, якщо момент двигуна не перевищує максимального Мmax, інакше наступає аварійний режим - випадання із синхронізму, який характеризується великими струмами.
Для керування швидкості синхронного двигуна є згідно до (2.130) практично один спосіб – зміна частоти напруги живлення f1. Двигун забезпечує двозонне керування швидкості. В першій зоні керування здійснюється при постійному моменті за рахунок пропорційної зміни напруги й частоти відповідно до закону (2.103)
 .
.
Діапазон керування в середньому складає 50-100. У другій зоні при керуванні з постійною потужністю підвищується тільки частота, а напруга залишається незмінною та номінальною. Максимальна швидкість обмежується при цьому механічною міцністю ротора.
Синхронний двигун підтримує всі режими гальмування. Проте найчастіше використовується динамічне гальмування. Для його організації обмотка статора відключається від мережі і замикається на трифазний реостат. Механічні характеристики мають вигляд, як в асинхронного двигуна. Гальмування противмиканням практично не застосовується, так як супроводжується великими стрибками струму при складній схемі керування.
Динамічні властивості двигуна визначаються на основі лінеаризації кутової характеристики на робочій ділянці, де синусоїду можна замінити прямою, проведеною через початок координат та номінальною точкою. Момент двигуна визначається на основі відношення з номінальною точкою
 , (2.131)
, (2.131)
де  – коефіцієнт жорсткості пружного
– коефіцієнт жорсткості пружного
електромагнітного зв’язку між ротором та статором;
jс – кут повороту вектора магнітного поля статора;
j – кут повороту ротора.
Після диференціювання залежності (2.131) отримується рівняння, яке описує електромеханічне перетворення в синхронному двигуні без врахування додаткової короткозамкненої обмотки ротора
 . (2.132)
. (2.132)
На основі цього рівняння будується структурна схема електромеханічного перетворювача, рис.2.120.

Рис.2.120.
Для врахування додаткової короткозамкненої обмотки ротора рівняння синхронного моменту (2.131) доповнюється відомим рівнянням моменту асинхронного двигуна на робочій ділянці механічної характеристики
 , (2.133)
, (2.133)
яке в операторній формі приймає вигляд
 . (2.134)
. (2.134)
Після доповнення моделі (2.134) відомою передаточною функцією механічної частини у вигляді одномасової схеми отримується структурна схема синхронного двигуна, рис.2.121.

Рис.2.121.
Як видно з рис.2.121, додаткова обмотка виконує функцію демпфера з коефіцієнтом b, який гасить коливання моменту, що обумовлені пружним електромагнітним зв’язком з коефіцієнтом сем.
Перевагою синхронного двигуна в порівнянні з асинхронним двигуном є більш високий коефіцієнт корисної дії, можливість рекуперації реактивної енергії, менша залежність від падіння напруги мережі, абсолютно жорсткі механічні характеристики, більша надійність, обумовлена великим повітряним зазором.
Ще однією важливою особливістю синхронного двигуна є можливість фіксації положення ротора без механічного гальма, якщо на обмотку статора подати постійний струм. Крім того, в явнополюсних двигунах можна організувати кроковий рух ротора шляхом послідовного перемикання обмоток фаз статора на постійний струм.
Недолік полягає в наявності пружного електромагнітного зв’язку, що обумовлює коливання моменту, достатньо висока складність системи керування швидкістю, невисокий пусковий момент.
2.3. Електромеханічні властивості інших типів двигунів
2.3.1. Дугостаторні та лінійні асинхронні двигуни
Якщо статор асинхронного двигуна умовно розрізати в одному місці вздовж осі та розгорнути в задану дугу, то отримується дугостаторний двигун, рис.2.122.

Рис.2.122.
Він використовується для безпосереднього приводу механізмів із маховиками, повороту платформ тощо, рис.2.123.

Рис.2.123.
В якості ротора виступають найчастіше елементи механізму, наприклад, масивний залізний маховик. Можливо також нанесення на його поверхню шару металу з високою провідністю, наприклад, міді чи алюмінію, в якому створюються основні зусилля. Залізо маховика в цьому випадку служить в основному для замикання магнітного потоку полюсів двигуна.
Якщо дугостаторний двигун умовно розгорнути у площину, то виходить індуктор лінійного асинхронного двигуна (ЛАД), який створює зусилля у вторинному елементі (роторі). Вторинним елементом може бути елемент механізму, смуга металу чи спеціально створена структура з електропровідного матеріалу. ЛАД може виконуватися одноіндукторним із пасивним зворотнім магнітопроводом чи без нього, а також двоіндукторним, рис.2.124,а та б.

а) б)
Рис.2.124.
Якщо індуктор плоского ЛАД умовно згорнути в трубку за поперечною віссю, то отримується циліндричний ЛАД, рис.2.125.

Рис.2.125.
Вторинний елемент виконується у вигляді штоку, а для підвищення енергетичних характеристик двигуна він складається з послідовно розташованих залізних та мідних чи алюмінієвих, латунних шайб. Індуктор циліндричного ЛАД може використовуватися також в якості насосу небезпечних рідких металів у трубопроводах.
Якщо індуктор плоского ЛАД умовно згорнути в тор в активній площині двигуна, то виходить торцевий ЛАД, який застосовується для обертання маховиків, млинів тощо.
Характерною особливістю розглянутих двигунів є залежність синхронної швидкості не від числа пар полюсів, як в обертального асинхронного двигуна, а від величини полюсного ділення
 , (2.135)
, (2.135)
де t - полюсне ділення, [м].
Механічна характеристика – залежність лінійної швидкості V від зусилля F, має вид як і у асинхронного двигуна, проте з більшим критичним ковзанням та меншим критичним зусиллям, обумовлених більшими електричним опором вторинного елементу та повітряним зазором, рис.2.126. Для керування швидкістю та гальмування використовуються всі способи як для асинхронного двигуна з короткозамкненим ротором.

Рис.2.126.
Перевагою двигунів цього типу є висока надійність, простота конструкції, можливість безпосереднього приводу робочих органів механізмів. Недолік полягає у зменшених енергетичних показниках, обумовлених розімкутим магнітопроводом та підвищеним повітряним зазором, відсутності серійного випуску.
Крім лінійних асинхронних двигунів існують також лінійні синхронні двигуни та лінійні двигуни постійного струму.
2.3.2. Вентильний двигун
Основним недоліком двигунів постійного струму при таких важливих перевагах, як висока здатність керування, високий пусковий момент, прямолінійність механічних характеристик, є наявність колектора, який виконує функцію механічного комутатора струму якоря. З розвитком силової напівпровідникової техніки з’явилася можливість замінити колектор на електронний комутатор на основі транзисторів чи тиристорів. Так як у звичайних двигунів колектор обертається, то для реалізації електронного комутатора двигун виготовляється у інверсному варіанті, тобто з обмоткою якоря на нерухомому статорі та системою збудження на роторі. Збудження двигунів потужністю приблизно до 30 кВт виконується за допомогою постійних магнітів. Найменша кількість секцій обмотки якоря для стійкої роботи двигуна повинна дорівнювати трьом, тому схема вентильного двигуна може реалізуватися на основі серійних синхронних двигунів. Для визначення моменту часу перемикання секцій обмотки якоря обов’язково потрібно мати датчик положення ротора. У звичайних двигунів постійного струму перемикання проходить автоматично шляхом переходу електричних щіток на наступні пластини колектора при повороті ротора. Таким чином, вентильний двигун – це система, яка складається з електронного комутатора, датчика положення ротора ДПР та безпосередньо інверсного двигуна постійного струму чи еквівалентного синхронного двигуна. Для вмикання трьох секцій обмотки якоря з нульовою точкою необхідно мати три електронні ключі комутатора, проте найчастіше застосовується схема із шістьма ключами для обмотки без нульової точки, рис.2.127.

Рис.2.127.
В кожен момент часу увімкнуто три ключі в залежності від положення ротора, які забезпечують протікання струмів у секціях обмотки якоря відповідно до рис.2.127 (увімкнуті ключі позначено символом *). Перемикання ключів відбувається при повороті ротора на кут
 , (2.136)
, (2.136)
де m=3 – кількість секцій (фаз) обмотки якоря;
р – число пар полюсів ротора.
Рівняння механічної характеристики вентильного двигуна має вигляд
 , (2.137)
, (2.137)
де  - конструктивна стала двигуна;
- конструктивна стала двигуна;
Ф – магнітний потік двигуна;
Х1, R1 – індуктивний та активний опір обмотки якоря;
Кw1, W1 – коефіцієнт намотування та кількість витків обмотки;
U – напруга живлення обмотки якоря.
При невеликих частотах обертання двигуна індуктивний опір обмотки набагато менший за активний опір Х1<<R1, тому жорсткість механічної характеристики вентильного двигуна незмінна і за аналітичним виглядом співпадає з виразом для звичайного двигуна постійного струму
 . (2.138)
. (2.138)
Таким чином, при невеликих швидкостях механічні характеристики мають прямолінійний вид. Із збільшенням швидкості, тобто частоти комутації струму, зростає індуктивний опір обмотки, що призводить до невеликого зменшення жорсткості характеристик та втратою ними прямолінійного вигляду.
Керування швидкістю відповідно до (2.137) здійснюється зміною напруги обмотки якоря шляхом широтно-імпульсної модуляції напруги мережі за допомогою електронних ключів комутатора та схеми керування СК. Діапазон керування швидкості для замкнених систем керування може досягати 10000. Штучні механічні характеристики у першому квадранті мають вигляд, як і для звичайного двигуна постійного струму з незалежним збудженням, проте з урахуванням зміни жорсткості характеристик від швидкості, рис.2.128.

Рис.2.128.
Вентильні двигуни застосовуються для приводу механізмів із високими вимогами до якості керування, при підвищених вимогах до умов експлуатації (вибухонебезпечне чи космічне середовище тощо), надійності, відсутності радіоперешкод. Вказані переваги обумовили також широке використання вентильних мікродвигунів у побутовій та комп’ютерній техніці для приводу дисків, стрічок, вентиляторів тощо.
2.3.3. Кроковий двигун
Кроковий двигун за принципом роботи схожий на синхронний двигун. Проте магнітне поле в ньому переміщується дискретно, тобто кроками, шляхом послідовної комутації фаз обмотки статора із заданою частотою. Максимальна частота комутації, при якій здійснюється рух ротора без пропуску кроків, називається частотою прийнятності. Вона визначається індуктивністю обмотки статора та моментом інерції ротора. Кроковий двигун може виконуватися з активним чи пасивним ротором та з одно-, дво- чи багатофазною обмоткою статора.
1) Активний ротор найчастіше виготовляється з постійними магнітами, хоча можливе виконання з електричною обмоткою збудження. Технологічно важко розмістити на роторі багато полюсів, тому активний ротор має достатньо великий крок ротора в межах (15-90)0. Для зменшення кроку повороту ротора використовується багатофазна обмотка статора, а також двостаторна та двороторна конструкція двигуна. Максимальна швидкість активного ротора складає 208-314 рад/с при максимальній частоті прийнятності 70-500 Гц. Принцип роботи крокового двигуна з активним ротором розглядається на двофазному двигуні з однією парою полюсів ротора на основі постійного магніту, рис.2.129.

а) б) в)
Рис.2.129.
Живлення обмоток статора здійснюється від комутатора, як правило імпульсами напруги за сигналом завдання частотно-імпульсного вигляду. В початковий момент напруга подається на першу фазу, яка створює вертикальне магнітне поле статора з полюсами N-S. При взаємодії полів статора та ротора, останній займає стійке положення, вказане на рис.2.129,а. Після увімкнення другої та відключення першої фази створюється магнітне поле статора з горизонтальними полюсами, тобто магнітне поле здійснює поворот за годинниковою стрілкою на 900, рис.2.129,б, що обумовлює виникнення кута непогодження між осями магнітних полів статора та ротора рівного 900. На ротор починає діяти момент
 , (2.139)
, (2.139)
де a – кут непогодження;
який повертає ротор слідом за полем статора. Якщо тепер відключити другу фазу та знову увімкнути першу, але з протилежною до початкової полярністю напруги, то ротор знову повернеться на кут 900, рис.2.129, в. Реверс двигуна легко здійснюється зміною полярності імпульсу поточного кроку. Розглянуте увімкнення фаз статора по черзі називається симетричною комутацією. Існує також несиметрична комутація, яка дозволяє зменшити крок повороту ротора вдвоє. Для цього друга фаза для вихідного положення схеми на рис.2.129,а вмикається при увімкненій першій фазі, що формує вісь магнітного поля статора, повернену на кут 450 і обумовлює відповідний поворот ротора. Потім перша фаза відключається і ротор повертається ще на 450. Далі знову вмикається перша фаза, але з протилежною полярністю напруги і т.д. Кут повороту активного ротора дорівнює
 , (2.140)
, (2.140)
де р – число пар полюсів ротора;
n – число перемикань за цикл.
Число перемикань при симетричній комутації дорівнює кількості фаз обмотки статора n=m, а при несиметричній - удвоє більше, тобто n=2m.
2) Крокові двигуни з пасивним ротором розділяються на реактивні та індукторні. Реактивний ротор не має систему збудження, а виготовляється з феромагнітного матеріалу і має явновиражені зубці. Статор також має зубці, проте з меншою кількістю. Кут повороту пасивного ротора визначається різницею чисел зубців на роторі Zр та статорі Zс
 . (2.141)
. (2.141)
Це дозволяє виготовляти двигуни з малим кутом повороту в межах (1-9)0 та великими частотами прийнятності 250-1500 Гц, проте недоліком є невеликий момент. Цей недолік відсутній у двигунів з індукторним ротором, в яких здійснюється підмагнічування пасивного ротора зі сторони статора за допомогою постійних магнітів чи обмотки збудження.
Таким чином, неперервний рух ротора крокового двигуна складається з кроків, рис.2.130.

Рис.2.130.
Так як рух ротора здійснюється кроками, то розглядаються середні значення швидкості та моменту двигуна. Середня швидкість обертання визначається частотою fкомутації фаз
 . (2.142)
. (2.142)
Кроковий двигун має абсолютно жорсткі механічні характеристики як синхронний двигун. Із збільшенням частоти комутації та відповідно швидкості двигуна струм у фазах не встигає досягнути усталеного значення, тому максимальний середній момент зменшується, рис.2.131.

Рис.2.131.
Кроковий двигун дуже легко стикується з ЕОМ за допомогою блоку перетворення двійкового коду у відповідну частоту, тому він широко застосовується для приводів подачі верстатів із числовим програмним керуванням, позиціювання робочих органів роботів та маніпуляторів тощо. Перевагою також є висока надійність та забезпечення заданої швидкості та положення без використання замкненої системи керування. Недолік полягає у коливаннях моменту при відпрацюванні кроків, збільшених габаритах двигуна, так як у конкретний момент часу працюють не всі обмотки статора. Випускаються також лінійні та багатокоординатні крокові двигуни.
2.4. Взаємозв’язані електроприводи
Взаємозв’язаними електроприводами називаються два чи декілька електроприводів, які зв’язані між собою механічно чи електрично для приводу механізму. Ці електроприводи використовуються в металургійній та паперовій промисловості, підйомних та шлюзових механізмах, установках великої потужності. Важливою задачею взаємозв’язаних електроприводів є заданий розподіл навантаження між електроприводами в статичному та динамічному режимах. В перехідних процесах розподіл навантаження може ще погіршуватися із-за наявності пружних механічних зв’язків чи механічних зазорів.
2.4.1. Електропривод із механічним з’єднанням валів
Механічне з’єднання валів двигунів застосовується для зменшення сумарного моменту інерції електропривода, спрощення кінематики, забезпечення заданих режимів роботи шляхом переведення тільки одного двигуна в режим гальмування, при відсутності двигуна великої потужності. При з’єднанні валів двох двигунів їх швидкість буде однакова w=w1=w2, а сумарний момент електропривода в статичному режимі дорівнює сумі моментів цих двигунів
 , (2.143)
, (2.143)
де b1, b2 - жорсткості механічних характеристик двигунів;
w01, w02 - швидкості ідеального холостого ходу двигунів.
З виразу (2.143) знаходиться рівняння механічної характеристики взаємозв’язаного електропривода
 , (2.144)
, (2.144)
де b - жорсткість механічної характеристики електроприводу;
w0 - швидкість ідеального холостого ходу електроприводу.
Як видно з (2.144), сумарна жорсткість електроприводу більша за жорсткості окремих двигунів. В статичному режимі момент електропривода дорівнює статичному моменту М=Мс. Після підстановки статичної швидкості з (2.144) у вирази для моментів окремих двигунів (2.143) знаходиться величина навантаження кожного двигуна електропривода окремо
 (2.145)
(2.145)
Взаємозв’язаний електропривод може бути як регульованим так і нерегульованим. В першому випадку значення швидкостей ідеального холостого ходу та жорсткості двигунів змінюється в широких межах. У другому випадку також існує невелика розбіжність вказаних величин навіть у двигунів одного типу внаслідок технологічних варіацій параметрів матеріалів, різних умов охолодження тощо. Це призводить до нерівномірного розподілу навантаження між двигунами. Наприклад, якщо два двигуни постійного струму з незалежним збудженням мають різне значення електричних опорів якірних кіл Rя1>Rя2, то жорсткості їх механічних характеристик будуть різними b1<b2 і двигун з більшою жорсткістю характеристики буде навантажено більше, рис.2.132.

Рис.2.132.
Якщо вказані двигуни матимуть різні магнітні потоки Ф1>Ф2, то їх механічні характеристики відрізнятимуться різними жорсткостями та швидкостями ідеального холостого ходу w02>w01, рис.2.133. В цьому випадку двигун із меншою швидкістю ідеального холостого ходу може працювати в режимі рекуперативного гальмування, створюючи гальмівний момент Мс1, тому другий двигун для забезпечення необхідного статичного моменту електропривода повинен додатково долати його моментом Мс2=Мс+Мс1.

Рис.2.133.
Рівномірний розподіл моментів достатньо легко отримується в електроприводі з двигунами постійного струму з незалежним збудженням при послідовному з’єднанні обмоток якоря. Цим забезпечується однакові струми якорів двигунів і відповідно їх моментів. Корекція здійснюється зміною струму збудження окремого двигуна.
2.4.2. Електропривод з електричним валом
Інколи необхідно забезпечити узгоджений рух механізмів однієї установки, які розташовані на значній відстані один від одного, наприклад, затворів шлюзів, розвідних мостів, великих токарних верстатів тощо. В цих випадках застосовуються різні схеми електричного валу при відсутності механічного зв’язку між валами декількох двигунів електропривода. Для реалізації електричного валу найчастіше використовуються асинхронні двигуни з фазними роторами:
1) В схемі зі зрівнювальними машинами електропривод кожного механізму складається з основних двигунів М1 та М2 будь-якого типу та зрівнювальних машин ЗМ1 та ЗМ2 у вигляді асинхронних двигунів одного типу, рис.2.134. Вали основного двигуна та зрівнювальної машини з’єднані між собою. Обмотки роторів зрівнювальних машин двох механізмів установки з’єднані між собою зустрічно. Якщо основні двигуни обертаються з однаковою швидкістю, то ЕРС роторів (2.75) зрівнювальних машин також однакові. Так як обмотки ротора увімкнені зустрічно, то струм у них не протікає і зрівнювальні машини не створюють моментів. При зміні швидкості одного з основних двигунів під дією навантаження, наприклад, при збільшенні швидкості двигуна М1, виникає різниця ЕРС роторів зрівнювальних машин, що обумовлює протікання однакового за величиною струму роторних кіл.

Рис.2.134.
Зрівнювальна машина ЗМ1 створює момент гальмування, а ЗМ2 - рушійний момент, під дією яких швидкості основних двигунів зрівнюються.
2) В схемі із загальними резисторами окремі зрівнювальні машини відсутні, а їх функції виконує одночасно основний асинхронний двигун із фазним ротором, рис.2.135.

Рис.2.135.
Якщо електричний опір додаткового резистора дорівнює нулю Rд=0, то електричний вал перетворюється у два, незалежно працюючи двигуни. Ця схема електричного валу використовується при зміні статичного моменту в невеликих межах. Недоліком є погіршення ККД із-за втрат у додатковому резисторі.
Дата добавления: 2015-06-01; просмотров: 10382;