Електромеханічні властивості двигунів змінного струму
2.2.1. Електромеханічні властивості асинхронного двигуна
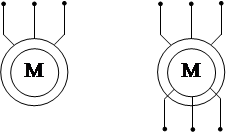 |
Асинхронний двигун (АД) є найпоширенішим двигуном серед усіх типів двигунів. Він має високу надійність, невисокі масу, габарити, вартість. Недоліком двигуна є невеликий пусковий момент, споживання реактивної потужності, складні математичні залежності між його параметрами, тому якісна система керування реалізується за допомогою відносно складних алгоритмів. Переважна більшість АД використовується у нерегульованих електроприводах. Конструктивно двигун складається з нерухомого статора, в пазах якого знаходиться трифазна обмотка статора. Кінці обмотки для комутації виводяться до клемної коробки. Виводи початків обмоток фаз позначаються символами С1, С2, С3, а кінці - С4, С5, С6 . За допомогою підшипникових щитів усередині статора встановлюється рухомий ротор з обмоткою ротора. В залежності від виду обмотки ротора АД розділяються на найбільш поширені двигуни з короткозамкненим та на менш поширені з фазним ротором, умовне графічне позначення яких відповідно представлено на рис.2.70,а та рис.2.70,б.
а) б)
Рис.2.70.
Короткозамкнена обмотка найчастіше виконується у вигляді білячої клітки. Три кінці обмотки фазного ротора за допомогою трьох мідних кілець та трьох електричних щіток виводяться до клемної коробки ротора. Виводи трифазної обмотки статора підключаються до мережі за схемою “зірка” (рис.2.71, а) або “трикутник” (рис.2.71, б) .
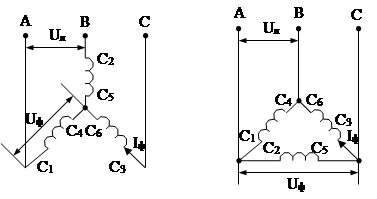 |
а) Рис.2.71. б)
Як видно з рис.2.71 для “зірки” лінійний струм дорівнює фазному Іл=Іф, а лінійна напруга Uл =Uф. Відповідно для схеми “трикутник” струм Іл=Іф, а напруга Uл =Uф, тому обмотку за схемою “зірка” можна вмикати на більшу в напругу, чим за “трикутником”, наприклад, на 380 та 220 В відповідно при забезпеченні незмінної потужності двигуна. Випускаються двигуни або тільки з однією схемою увімкнення “зірка” чи “трикутник”, чи двигуни, які дозволяють робити перемикання з однієї схеми на іншу. В останньому випадку комутація здійснюється в клемній коробці за допомогою перемичок між шпильками С1-С6, рис.2.72.
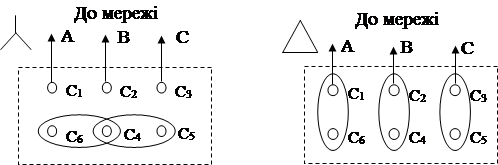 |
Рис.2.72.
При підключенні обмотки статора до мережі створюється магнітне поле, яке обертається із синхронною швидкістю
 , [рад/с] (2.72)
, [рад/с] (2.72)
маючи синхронну частоту обертання
 , [об/хв] (2.73)
, [об/хв] (2.73)
де f1 – частота напруги живлення статора, Гц;
р – число пар полюсів двигуна.
Для стандартної мережі з частотою напруги f1=50 Гц існує відповідний ряд синхронних швидкостей у залежності від числа пар полюсів двигуна, табл.2.1. Тому при проектуванні ЕП та механізму потрібно заздалегідь спиратися на вказаний ряд швидкостей. Із збільшенням числа пар полюсів збільшуються й габарити двигунів.
Таблиця 2.1.
| Число пар полюсів | Синхронна частота обертання, об/хв |
Створене магнітне поле індукує ЕРС взаємоіндукції в обмотці статора Е1 та ротора Е2s
 (2.74)
(2.74)
 (2.75)
(2.75)
де  – ЕРС нерухомого ротора;
– ЕРС нерухомого ротора;
W1, W2 – кількість витків обмоток статора та ротора;
Kw1, Kw2 – коефіцієнти намотування обмоток статора та ротора;
s – ковзання двигуна.
Під дією ЕРС Е2s в обмотці ротора протікає струм ротора І2, який, взаємодіючи з магнітним потоком Ф, створює момент двигуна М. Цей момент обумовлює обертання ротора із швидкістю wвідносно швидкості магнітного поля wc (2.72) та визначає ковзання двигуна
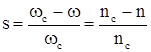 . (2.76)
. (2.76)
В залежності від швидкості двигуна ковзання приймає значення відповідно до табл. 2.2.
Таблиця 2.2.
| Швидкість | Ковзання |
| w = wc | s = 0 |
| w = 0 | s = 1 |
| w = - wc | s = 2 |
| w > wc | s < 0 |
| w < 0 | s > 1 |
| w = wн | s = sн |
Часто ковзання представляється у відсотках
 .
.
Двигуни звичайного виконання мають номінальне ковзання в межах 1,5-6%. Для металургійних, кранових та інших механізмів випускаються двигуни з підвищеним ковзанням 8-12%. Так як ковзання однозначно зв’язане із швидкістю формулою (2.76), із якої
 , (2.77)
, (2.77)
то механічна характеристика АД представляється також залежністю ковзання від моменту s=f(M). Згідно до (2.75) ЕРС ротора Е2s залежить від ковзання і при синхронній швидкості двигуна w=wc дорівнює нулю Е2s=0, що є ознакою роботи двигуна в точці ідеального холостого ходу. Частота ЕРС ротора Е2s та струму ротора І2 також залежить від ковзання
 , (2.78)
, (2.78)
тобто із зменшенням ковзання частота в роторі зменшується і при наближенні швидкості двигуна до синхронної швидкості wc струм та ЕРС ротора наближаються за формою до постійного струму.
Відношення ЕРС статора до ЕРС нерухомого ротора називається коефіцієнтом трансформації і використовується для приведення параметрів ротора до статора
 , (2.79)
, (2.79)
де U1л н – номінальна лінійна напруга статора;
Е2н – номінальна ЕРС ротора.
На основі Г-подібної схеми заміщення фази двигуна з теорії електричних машин виводиться залежність для моменту двигуна, рис.2.73.
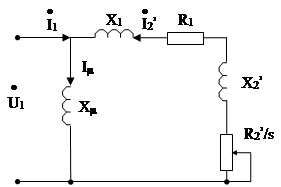 |
Рис.2.73.
де U1 – фазна напруга обмотки статора;
І1 – струм обмотки статора;
 – приведений струм обмотки ротора;
– приведений струм обмотки ротора;
Іm – струм намагнічування, який створює магнітний потік Ф;
Хm – індуктивний опір взаємоіндукції;
R1, Х1– активний та індуктивний опори обмотки статора;
 – приведений активний опір обмотки ротора;
– приведений активний опір обмотки ротора;
 – приведений індуктивний обмотки ротора;
– приведений індуктивний обмотки ротора;
m1, m2 – кількість фаз обмоток статора та ротора.
Для трифазного двигуна з фазним ротором m1=m2=3, а для двигуна з короткозамкненим ротором m2=Z2, W2=0,5, Kw2=1. Згідно рис.2.73 струм ротора визначається залежністю
 , (2.80)
, (2.80)
де Xk =X1 +X2’ – сумарний індуктивний опір.
Активна електромагнітна потужність трифазного АД, яка передається до ротора через повітряний зазор, з однієї сторони дорівнює
 , (2.81)
, (2.81)
а з іншої
 . (2.82)
. (2.82)
Після порівняння потужностей (2.81) та (2.82) отримується рівняння електромагнітного моменту асинхронного двигуна
 . (2.83)
. (2.83)
Як видно з (2.83), момент двигуна залежить від квадрата напруги статора, тому АД дуже чутливий до зниження напруги живлення. Вираз для пускового моменту двигуна отримується з (2.83) при ковзанні s=1
 . (2.84)
. (2.84)
Функція (2.83) має точки екстремуму за ковзанням, які знаходяться з рівняння
 .
.
Це критичне ковзання
 . (2.85)
. (2.85)
Критичному ковзанню відповідає критичний момент
 . (2.86)
. (2.86)
В рівняннях (2.85) та (2.86) знак “– “ береться, якщо швидкість двигуна більша за синхронну w > wc.
З урахуванням формул для критичного ковзання та моменту (2.85) та (2.86) рівняння моменту (2.83) перетворюється у формулу Клосса, яка використовується для аналітичної побудови механічних характеристик АД
 , (2.87)
, (2.87)
Двигуни середньої та великої потужності мають значення опору R1 значно менше, чим інші електричні опори (рис.2.73), тому часто воно нехтується R1=0 і формули критичного ковзання, моменту та Клосса значно спрощуються
 . (2.88)
. (2.88)
 . (2.89)
. (2.89)
 . (2.90)
. (2.90)
З формули (2.90) знаходиться простий вираз для знаходження критичного ковзання двигуна
 (2.91)
(2.91)
де lм=Мk/Мн – відношення критичного та номінального моментів.
Як видно з (2.87) чи (2.90), механічна характеристика s=f(M) при малих ковзаннях s<<sk наближається до прямолінійної залежності
 , (2.92)
, (2.92)
а при великих s>>sk - до гіперболічного характеру
 . (2.93)
. (2.93)
Відповідно до наведеного, механічна характеристика асинхронного двигуна представлена на рис.2.74.
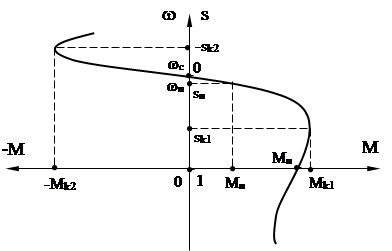 |
Рис.2.74.
Характерними точками механічної характеристики є:
1) Точка ідеального холостого ходу: М=0, w=wс, s=0;
2) Номінальна точка: М=Мн, w=wн, s=sн;
3) Пускова точка (точка короткого замикання): М=Мп, w=0, s=1;
4) Точка критичного (максимального) моменту: М=Мk, s=sk.
Робочою ділянкою стійкої роботи двигуна в усталеному режимі є частина механічної характеристики між критичними ковзаннями sk1 та sk2. 
Синхронна швидкість поля wс є швидкістю ідеального холостого ходу двигуна. Критичний момент Мк – це максимальний момент двигуна, який визначає його перевантажувальну здатність lм=Мк/Мн=1,7¸3,4. Більші значення мають двигуни спеціального виконання, наприклад, для кранових механізмів. Згідно до (2.86) критичний момент у II квадранті більший, ніж у I квадранті Мк2>Мк1. Величина пускового моменту Мп (2.84) залежить від величини активного електричного опору ротора R2’, тому випускаються двигуни з різною конструкцією короткозамкнених роторів, наприклад, із круглими та глибокими пазами, подвійною кліткою тощо, які забезпечують кратність пускового моменту lп=Мп/Мн=1¸1,8. В порівнянні з двигунами постійного струму асинхронні двигуни мають невеликий пусковий момент, що є недоліком. Природна механічна характеристика двигуна відповідає його увімкненню на номінальні напругу U1 і частоту f1 статора при відсутності додаткових електричних опорів у колі ротора чи статора.
Електромеханічна характеристика двигуна представляється залежностямиw=f(I1), s=f(I1), а також w=f(I’2), s=f(I’2), рис.2.75.
 |
Рис.2.75.
Характеристика s=f(I’2) будується на основі формули (2.80). При синхронній швидкості wс (s=0) струм ротора дорівнює нулю, а при w=0 (s=1) – пусковому I’2п. Максимальному струмові ротора
 (2.94)
(2.94)
відповідає ковзання
 , (2.95)
, (2.95)
яке лежить в області від’ємних значень. При збільшенні абсолютних значень ковзання та швидкості струм ротора асимптотично наближається до усталеного значення
 . (2.96)
. (2.96)
Так як струм статора згідно рис.2.73 дорівнює  , то за формою він повторює струм ротора, але зміщується по осі абсцис на величину струму намагнічування Im.
, то за формою він повторює струм ротора, але зміщується по осі абсцис на величину струму намагнічування Im.
В точці ідеального холостого ходу s=0 двигун споживає з мережі реактивний струм намагнічування I1=Im,який у залежності від типу двигуна може складати 25¸50 % номінального струму статора, що є недоліком двигуна з енергетичної точки зору.
Асинхронний двигун із короткозамкненим ротором характеризується наступними паспортними даними, які знаходяться на його табличці:
1) Рн, кВт – номінальна потужність, це - механічна потужність на валі двигуна, на яку може розраховувати користувач;
2) U1н, В – номінальна лінійна напруга статора;
3) I1н, А – номінальний лінійний струм статора;
4) nн, об/хв – номінальна частота обертання;
5) cosjн – номінальний коефіцієнт потужності;
6) hн – номінальний ККД;
7) схема з’єднання обмотки статора (зірка/трикутник).
Для двигуна з фазним ротором додатково вказується:
8) Е2н, В – номінальна ЕРС ротора;
9) I2н, А – номінальний струм ротора.
За цими паспортними даними можна знайти:
1)  - номінальну кутову швидкість, [рад/с];
- номінальну кутову швидкість, [рад/с];
2)  - номінальний механічний момент двигуна, [Нм];
- номінальний механічний момент двигуна, [Нм];
3)  - номінальну електричну потужність,
- номінальну електричну потужність,
яку споживає двигун,[ВA];
4)  - номінальну активну електричну потужність,
- номінальну активну електричну потужність,
яку споживає двигун, [Вт];
5)  - номінальний електричний опір двигуна, [Ом];
- номінальний електричний опір двигуна, [Ом];
6)  - номінальний ККД, якщо його не вказано;
- номінальний ККД, якщо його не вказано;
7)  - номінальне ковзання;
- номінальне ковзання;
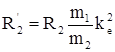
8)  - активний електричний опір обмотки ротора.
- активний електричний опір обмотки ротора.
2.2.1.1. Способи керування швидкістю асинхронного двигуна та штучні механічні характеристики
Для зміни моменту двигуна згідно до формули (2.83) і відповідно для керування швидкістю існують наступні способи:
1) Зміна напруги статора U1;
2) Зміна частоти напруги статора f1, в тому числі одночасно зі зміною напруги статора U1;
3) Зміна активного електричного опору кола ротора R’2 (тільки для двигунів із фазним ротором);
4) Зміна числа пар полюсів p (тільки для спеціальних полюсоперемикаємих двигунів);
5) Використання енергії ковзання за допомогою спеціальних каскадних схем (тільки для двигунів із фазним ротором);
6) Подвійне живлення двигуна (тільки для двигунів із фазним ротором);
7) Зміна електричного опору кола статора R1 (тільки для двигунів із короткозамкненим ротором).
1) Керування швидкістю за рахунок зміни напруги статора.
Для реалізації способу керування двигун живиться від силового регулятора напруги (РН), який виготовляється на основі транзисторів чи тиристорів, рис.2.76.
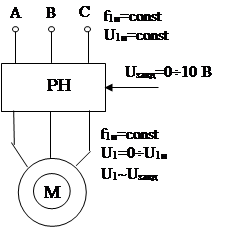 |
Рис.2.76.
Напруга статора врівноважується ЕРС статора та падінням напруги в колі статора
 . (2.97)
. (2.97)
Якщо знехтувати незначним значенням падіння напруги в статорі, то згідно до (2.97) приблизно можна прийняти
 . (2.98)
. (2.98)
З формули (2.74) знаходиться магнітний потік двигуна
 . (2.99)
. (2.99)
Як видно з (2.99), для запобігання насичення магнітної системи двигуна напругу статора можна тільки зменшувати відносно номінальної U1н, бо номінальний магнітний потік Фн лежить близько до потоку насичення Фнас рис.2.77.
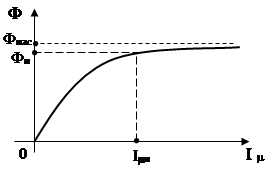 |
Рис.2.77.
Струм намагнічування Im відповідно до схеми заміщення на рис.2.73 пропорційно залежить від напруги статора U1. Зниження напруги статора не впливає на швидкість ідеального холостого ходу wс(2.72) та на критичне ковзання Sk(2.85), а тільки зменшує пропорційно квадрата напруги критичний момент Мк (2.86), тому всі штучні характеристики проходять через одну точкуwс та мають однакове критичне ковзання Sk, рис.2.78. Перевагою даного способу керування є можливість плавної зміни швидкості. Недоліком є суттєве зменшення перевантажувальної здатності двигуна пропорційно квадрата напруги та зниження жорсткості механічної характеристики, тобто збільшення ковзання двигуна. Це призводить до підвищення втрат у колі ротора пропорційно ковзанню
 , (2.100)
, (2.100)
тому цей спосіб використовується при невеликому діапазоні керування швидкості в межах 2-4, а також для запуску механізмів та короткочасному зниженню швидкості.
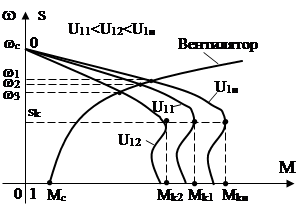 |
Рис.2.78.
Cпосіб якнайкраще підходить для струминних механізмів (вентиляторів, насосів тощо), момент опору яких залежить від квадрата швидкості. Розширення діапазону керування до 5-10 та підвищення жорсткості характеристик здійснюється за рахунок замкненої системи керування зі зворотним зв’язком за швидкістю.
2) Керування швидкістю за рахунок зміни частоти та амплітуди напруги живлення.
В цьому випадку обмотка статора двигуна живиться від силового перетворювача частоти, який реалізується на транзисторах чи тиристорах, рис.2.78. Якщо керування швидкістю здійснюється тільки зміною частоти f1, то її згідно до (2.99) можна тільки збільшувати відносно номінальної f1н для запобігання насичення магнітного кола двигуна.
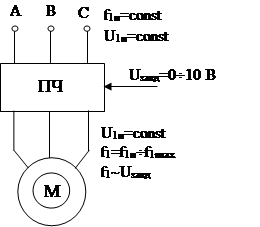 |
Рис.2.79.
Збільшення частоти призводить до пропорційного збільшення синхронної швидкості wс(2.72) та до зменшення пропорційно квадрата частоти критичного моменту Мк (2.86), так як і синхронна швидкість і індуктивний опір обмоток статора та ротора залежать від частоти
 (2.101)
(2.101)
Жорсткість механічних характеристик на робочій ділянці не змінюється, бо пропорційному збільшенню синхронної швидкості відповідає пропорційне зменшення критичного ковзання (2.85). Сімейство штучних механічних характеристик представлено на рис.2.80.
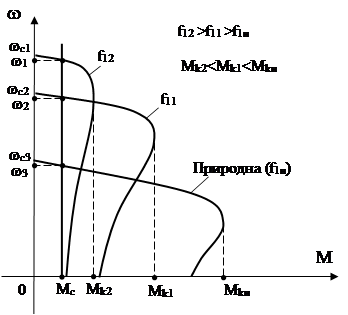 |
Рис.2.80.
Робочі точки визначаються перетином механічних характеристик двигуна та механізму, який створює статичний момент Мс. Перевагою способу є плавна зміна швидкості при незмінній жорсткості характеристик. Недолік полягає в зменшенні перевантажувальної здатності двигуна та можливості керування швидкістю тільки вище номінальної.
Якщо знехтувати активним електричним опором статора R1, то критичний момент двигуна (2.89) стає залежним у квадраті від напруги та частоти статора
 , (2.102)
, (2.102)
де К – коефіцієнт пропорційності.
Звідсіля випливає основний закон частотного керування швидкістю асинхронного двигуна, який ще називається законом Костенка
 . (2.103)
. (2.103)
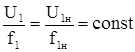
Згідно до нього частота змінюється пропорційно зміні напруги. Це забезпечує незмінне значення критичного моменту (2.102) та незмінний номінальний магнітний потік (2.99) при широкому діапазоні керування швидкістю від нулю і до максимальної. Найчастіше в якості максимальної виступає номінальна швидкість, якій відповідає номінальна напруга статора. Підвищення напруги вище номінальної обмежується електричною стійкістю ізоляції обмотки. Сімейство штучних механічних характеристик, які мають паралельні робочі ділянки, представлено на рис.2.81.
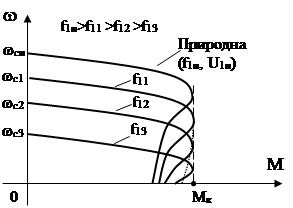 |
Рис.2.81.
При низьких швидкостях падіння напруги в колі статора, яке нехтується при виводі закону керування, стає співрозмірним із напругою живлення статора, що призводить до зменшення критичного моменту (крива лінія з точок на рис.2.81). Для виправлення недоліку на низьких швидкостях напругу потрібно зменшувати в меншій мірі, чим за законом (2.103) або за допомогою замкненої системи керування підтримувати незмінним співвідношення ЕРС статора до частоти, щоб згідно (2.99) не змінювався магнітний потік. Крім того, при пуску двигуна, тобто при частоті близької до нульової, потрібне початкове значення напруги U1o для створення магнітного потоку і відповідно моменту двигуна. Для цього пуск починається з початкової частоти f1o=3-5 Гц та відповідного значення напруги або пропорція (2.103) дещо порушується, рис.2.82. В останньому випадку значення U1o може встановлюватися вручну чи автоматично, в тому числі з урахуванням величини динамічного моменту для створення заданого прискорення ЕП.
 |
Рис.2.82.
Для реалізації способу керування (2.103) найчастіше використовуються перетворювачі частоти з ланкою постійного струму, які складаються з керованого випрямляча (КВ), фільтра (Ф), автономного інвертора (АІ) та систем керування випрямлячем (СКВ), інвертором (СКІ) і електроприводом у цілому (СК), рис.2.83. Величина напруги статора U1 змінюється КВ, а частоти f1 – АІ. Для невеликих потужностей замість керованого випрямляча використовується некерований, а за допомогою АІ із системою широтно-імпульсної модуляції (ШІМ) одночасно регулюється і напруга й частота. АІ може бути джерелом напруги чи струму і в залежності від цього існують різні види замкнених систем керування швидкістю асинхронного двигуна.
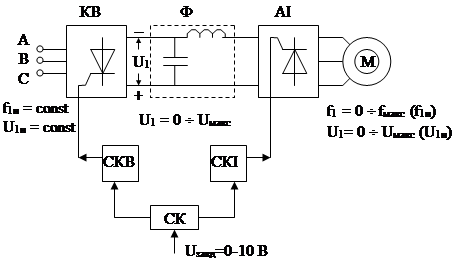 |
Рис.2.83.
Цей спосіб частотного керування швидкості асинхронного двигуна є основним. Його перевагою є плавна зміна швидкості від нуля і до максимальної (номінальної) при незмінній жорсткості механічних характеристик та перевантажувальної здатності двигуна. Діапазон керування складає 5-10 для розімкнутих систем та 1000 і більше для замкнених. Він називається “керування в першій зоні з постійним моментом двигуна”. Недолік полягає у відносній складності та підвищеній вартості перетворювача частоти.
Для струминних механізмів (вентилятори, насоси тощо), статичний момент яких пропорційний квадрату швидкості  , найбільш економічним є закон керування
, найбільш економічним є закон керування
 , (2.104)
, (2.104)
при якому критичний момент двигуна зменшується пропорційно квадрата швидкості  , відтворюючи характер статичного моменту та зменшуючи магнітний потік і споживання реактивної енергії, рис.2.84.
, відтворюючи характер статичного моменту та зменшуючи магнітний потік і споживання реактивної енергії, рис.2.84.
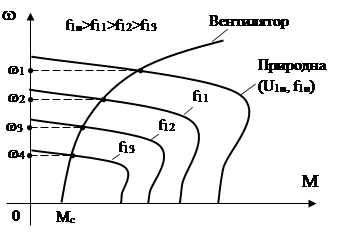 |
Рис.2.84.
Для керування швидкістю із забезпеченням повної потужності двигуна, але з послабленням магнітного потоку і відповідно зменшенням критичного моменту двигуна застосовується закон керування
 . (2.105)
. (2.105)
При цьому момент двигуна (2.89) змінюється обернено пропорційно, а синхронна швидкість (2.72) пропорційно частоті, тому потужність (2.82), як їх добуток залишається незмінною. Сімейство штучних механічних характеристик показано на рис.2.85. Напруга вище номінальної не піднімається і при подальшому збільшенні частоти вона залишається незмінною.
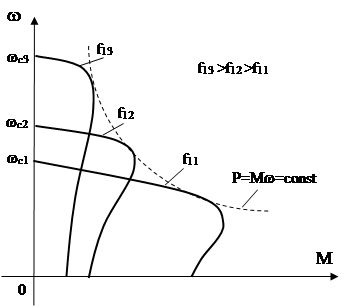
Рис.2.85.
Розглянуті частотні способи керування швидкістю асинхронного двигуна є найбільш поширеними. Розвиток елементної бази силової промелектроніки та впровадження мікропроцесорних систем керування електроприводом суттєво зменшили вартість та габарити перетворювачів частоти, а також забезпечили високу якість керування, що обумовлює заміну нерегульованих асинхронних ЕП на регульовані та витіснення з окремих галузей ЕП постійного струму.
3) Керування швидкості за рахунок увімкнення додаткового електричного резистора в коло ротора.
Для керування швидкості використовуються двигуни з фазним ротором, в коло ротора яких підключається трифазний реостат. Електричний опір реостата Rд за умовами комутації змінюється ступінчато шляхом закорочування секцій силовими контактами, рис.2.86.
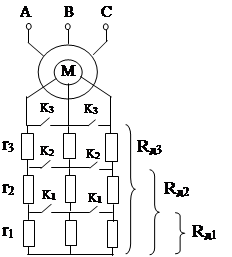 |
Рис.2.86
Сумарний приведений активний електричний опір кола ротора дорівнює
 .
.
Синхронна швидкість wс (2.72) та критичний момент Мк (2.86) не залежать від R’2, тому всі штучні механічні характеристики проходять через одну точку ідеального холостого ходу. Критичне ковзання Sk (2.85) збільшується із збільшенням R’2, що призводить до зменшення жорсткості штучних характеристик, рис.2.87.
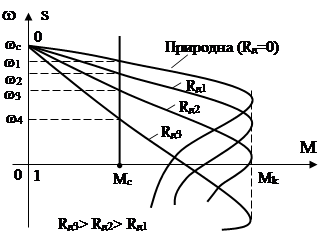 |
Рис.2.87.
На основі відношення критичних ковзань на штучній та природній характеристиках знаходиться критичне ковзання на штучній характеристиці
 (2.106)
(2.106)
чи величина додаткового опору, яка забезпечує потрібне критичне ковзання
 . (2.107)
. (2.107)
Формула (2.107) справедлива також для відношення ковзань при будь-якому статичному моменту.
Перевагою способу є простота його реалізації та підвищення пускового моменту двигуна, який приймає максимальне значення при критичному ковзанні sк =1. Недоліки полягають у керуванні швидкістю спупінчато, зменшенні жорсткості механічних характеристик, що призводить до різкого збільшення втрат у колі ротора пропорційно ковзанню (2.100) та до чутливості зміни навантаження. Це обмежує діапазон керування на рівні 1,5-2 для незмінного статичного моменту та 3-5 для моменту вентиляторного типу.
 |
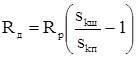
а) б)
Рис.2.88.
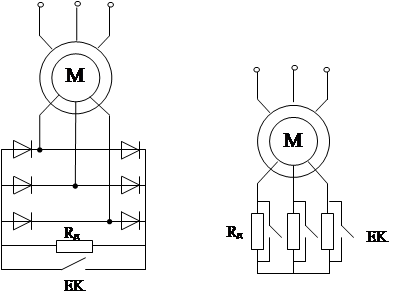
Увімкнення додаткового резистора в коло ротора застосовується при керуванні швидкістю двигуна за рахунок зміни напруги статора для збільшення пускового моменту. Використовуються також схеми з імпульсним регулюванням еквівалентного опору в колі ротора за допомогою широтно-імпульсної модуляції електронних ключів ЕК на тиристорах чи транзисторах, рис.2.88,а та б. Керування здійснюється зміною шпаруватості імпульсів у межах g=0-1. Це дозволяє плавно змінювати швидкість, рис.2.89, проте додатковим недоліком є погіршення енергетичних показників ЕП через несинусоїдальність струмів двигуна.
 |
Рис.2.89.
Дата добавления: 2015-06-01; просмотров: 5255;