Керування швидкості за рахунок зміни числа пар полюсів.
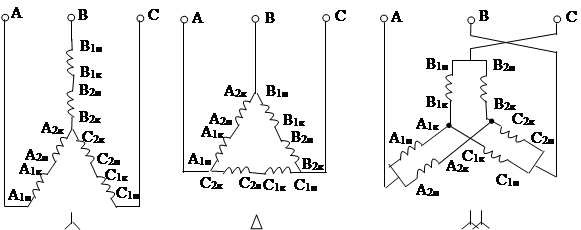
Для зміни швидкості застосовуються спеціальні асинхронні двигуни з короткозамкненим ротором, які дозволяють змінювати число пар полюсів pшляхом перемикання обмотки статора. Чим менше число пар полюсів, тим вища синхронна швидкість wс (2.72). Так як число пар полюсів може бути тільки цілим: 1, 2, 3 і т.д., то швидкість змінюється ступінчато. Максимальна частота обертання, на яку випускаються двигуни широкого призначення, становить 3000 об/хв, а мінімальна – 500 об/хв. Найбільш поширені двошвидкістні двигуни, які мають одну обмотку статора розділену на дві частини. Виводи кожної частини позначені, як початок та кінець, наприклад, А1п та А1к. Серед багатьох схем з’єднання обмоток найчастіше використовуються схеми “зірка”, “трикутник” та “подвійна зірка”, рис.2.92, а,б,в.
 |
а) б) в)
Рис.2.92.
Схема “подвійна зірка” забезпечує вдвічі менше пар полюсів, тому перемикання з неї здійснюється на схеми “ зірка” чи “трикутник”.
 |
а) б)
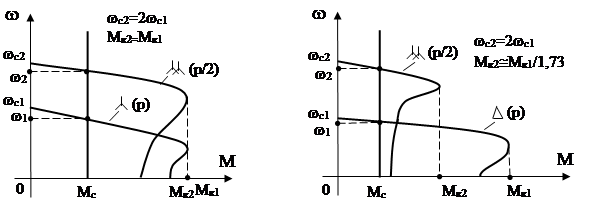
Рис.2.93.
В першому випадку критичні моменти рівні, тому схема переключення “зірка/подвійна зірка” називається схемою з постійним моментом, рис.2.93,а. В другому випадку критичні моменти відрізняються майже вдвічі в 1,73 раза, тому схема “трикутник/подвійна зірка” називається схемою з постійною потужністю, рис.2.93,б. Для збереження напрямку обертання двигуна необхідно при перемиканні на “подвійну зірку” поміняти місцями будь-які два виводи обмотки статора.
Крім двошвидкістних застосовуються також три- та чотиришвидкістні двигуни. Тришвидкістні двигуни мають дві обмотки статора, одна з них постійно увімкнена у мережу, а друга перемикається, як у розглянутих двошвидкістних.
Перевагою способу є простота реалізації, незмінна та висока жорсткість механічних характеристик, висока економічність та надійність. Недоліком є зміна швидкості тільки ступінчато та невеликий діапазон керування швидкістю 2-6, який визначається кількістю перемикаємих полюсів. Двигуни мають підвищені габарити та вартість. Завдяки своїм перевагам двигуни застосовуються в ЕП вентиляторів, насосів, елеваторів, ліфтів, верстатів, в цементній та нафтовій галузях.
5) Каскадні схеми керування швидкістю двигуна.
В роторі двигуна виділяються втрати, які можна використати для керування швидкістю. Втрати пропорційні ковзанню (2.100)  і в потужних двигунах, для яких застосовується цей спосіб, досягають значних величин. Керування швидкістю здійснюється введенням у коло ротора додаткової ЕРС, тому для реалізації способу керування застосовуються двигуни з фазним ротором. В залежності від використання енергії ковзання розрізняються електричні та електромеханічні каскадні електроприводи. В електричних каскадах енергія ковзання повертається в мережу, а в електромеханічних на вал асинхронного двигуна. За типом пристроїв перетворення енергії ковзання каскади розділяються на електромашинні, вентильно-машинні та вентильні. Електромашинні каскади в теперішній час не використовуються. Функціональна схема вентильно-машинного електромеханічного каскаду представлена на рис.2.94. Каскад складається з основного асинхронного двигуна М1, обмотку статора якого увімкнено у мережу. В колі ротора знаходиться трифазний діодний міст ДМ, послідовно увімкнений з обмоткою якоря двигуна постійного струму з незалежним збудженням М2. Керування швидкістю здійснюється зміною ЕРС двигуна постійного струму шляхом зміни його струму збудження Із. Обидва двигуни зв’язані механічним валом, тому електромагнітний момент каскаду дорівнює сумі їх моментів
і в потужних двигунах, для яких застосовується цей спосіб, досягають значних величин. Керування швидкістю здійснюється введенням у коло ротора додаткової ЕРС, тому для реалізації способу керування застосовуються двигуни з фазним ротором. В залежності від використання енергії ковзання розрізняються електричні та електромеханічні каскадні електроприводи. В електричних каскадах енергія ковзання повертається в мережу, а в електромеханічних на вал асинхронного двигуна. За типом пристроїв перетворення енергії ковзання каскади розділяються на електромашинні, вентильно-машинні та вентильні. Електромашинні каскади в теперішній час не використовуються. Функціональна схема вентильно-машинного електромеханічного каскаду представлена на рис.2.94. Каскад складається з основного асинхронного двигуна М1, обмотку статора якого увімкнено у мережу. В колі ротора знаходиться трифазний діодний міст ДМ, послідовно увімкнений з обмоткою якоря двигуна постійного струму з незалежним збудженням М2. Керування швидкістю здійснюється зміною ЕРС двигуна постійного струму шляхом зміни його струму збудження Із. Обидва двигуни зв’язані механічним валом, тому електромагнітний момент каскаду дорівнює сумі їх моментів
 , (2.108)
, (2.108)
де Ed0 – ЕРС діодного мосту при ковзанні s=1;
Id – випрямлений струм у колі ротора;
Хд – приведений до ротора індуктивний опір фази двигуна.
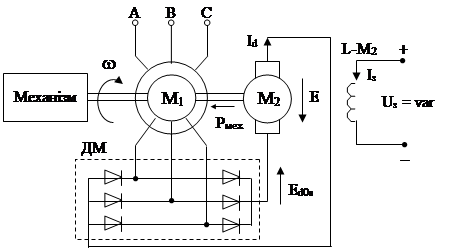 |
Рис.2.94.
Рівняння Кірхгофа для кола ротора має вигляд
 , (2.109)
, (2.109)
де  - ЕРС двигуна М2; (2.110)
- ЕРС двигуна М2; (2.110)
R – активний опір кола ротора;
2DU – падіння напруги на вентилях ДМ.
Після підстановки у (2.108) значення струму з (2.109) з урахуванням ЕРС (2.110) знаходиться остаточне рівняння моменту каскаду
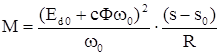 , (2.111)
, (2.111)
де s0 – ковзання каскаду при Іd=0.
Згідно до (2.111) момент каскаду збільшується із збільшенням магнітного потоку Ф, а швидкість зменшується, рис.2.95. В області невеликих навантажень може виникнути режим переривистих струмів, що зумовлює підйом механічних характеристик. При відсутності струму збудження Із механічна характеристика каскаду наближається до природної характеристики асинхронного двигуна, проте зі збільшеним електричним опором кола ротора на величину опору якоря ДПС та внутрішнього опору діодного мосту. Двигун постійного струму повертає на вал механічну потужність Рмех, яка дорівнює майже всій потужності ковзання DР2=P1s (2.100) за винятком втрат в роторі, діодному мості та двигуні постійного струму. Асинхронний же двигун створює на валі потужність
 , (2.112)
, (2.112)
яка з урахуванням поверненої потужності залишається незмінною, якщо знехтувати втратами. Таким чином, сумарна потужність підтримується незмінною незалежно від ковзання, тому вентильно-машинний електромеханічний каскад називається каскадом із постійною потужністю.
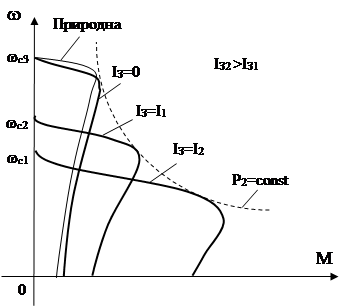 |
Рис.2.95.
Перевагою цього каскаду є висока економічність при ККД 0,82-0,85 й коефіцієнті потужності 0,75-0,8, висока плавність керування та жорсткість характеристик, яка поступається тільки частотному керуванню. Недолік полягає у великій установленій потужності двигуна постійного струму, яка залежить від діапазону керування швидкістю
 . (2.113)
. (2.113)
Так при ковзанні s=0,5 потужність ДПС дорівнює потужності АД, тобто ДПС може самостійно здійснити привод механізму, тому практичний діапазон керування швидкістю не перевершує 2.
У вентильно-машинних електричних каскадах ДПС не зв’язаний з АД, а приводить у рух синхронний генератор, який повертає електричну енергію у мережу. Каскад забезпечує штучні механічні характеристики з постійним моментом та незмінною високою жорсткістю характеристик, яка поступається тільки характеристикам при частотному керуванні швидкості. ККД складає 0,82-0,85, а коефіцієнт потужності 0,7-0,75 й може бути збільшений шляхом перезбудження синхронного генератора. З розвитком напівпровідникової техніки машинні елементи каскаду замінилися на електронні. Найпоширенішою є схема асинхронно-вентильного електричного каскаду (АВК), рис.2.96.
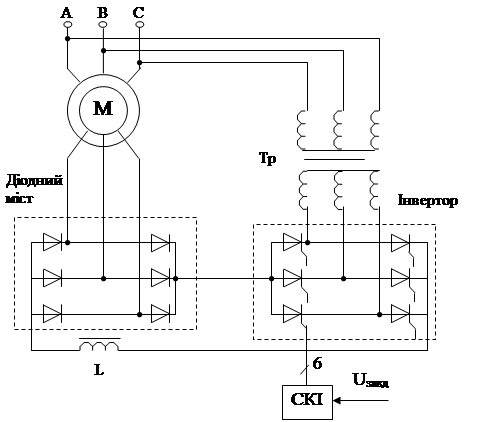 |
Рис.2.96.
Послідовно з діодним мостом увімкнено інвертор, який через узгоджувальний трансформатор підключено до мережі. Інвертор створює ЕРС, за допомогою якої здійснюється керування швидкістю двигуна, та повертає енергію ковзання у мережу. Задана швидкість встановлюється сигналом завдання Uзавд системи керування інвертором (СКІ). Механічні характеристики АВК приведено на рис.2.97.
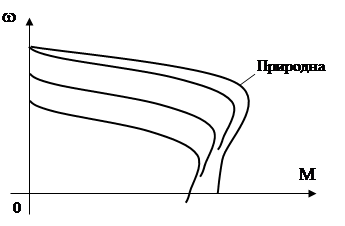 |
Рис.2.97.
Керування швидкістю здійснюється при постійному моменті, проте при зменшенні швидкості перевантажувальна здатність двигуна дещо зменшується на 10-15%. ККД цього каскаду більший, ніж у вентильно-машинних каскадах й складає 0,82-0,9, проте коефіцієнт потужності значно менший. Установлена потужність при діапазоні керування швидкістю рівному 2 складає 250%, із них 100% - АД і по 50% - діодний міст, інвертор, трансформатор. Розглянуті каскадні схеми забезпечують однозонне керування вниз від номінальної швидкості .
6) Керування швидкістю подвійним живленням двигуна.
Достатньо ефективні закони керування швидкістю можна отримати у двигуні подвійного живлення (ДПЖ), який також відноситься до каскадних систем електропривода. На відміну від розглянутих схем, ДПЖ дозволяє змінювати напрямок потоку енергії у колі ротора, тобто не тільки перетворювати енергію ковзання від ротора, а й направляти в ротор додаткову електричну енергію. Це забезпечує двозонне керування швидкістю, тобто як нижче так і вище номінальної. Для реалізації способу в коло ротора двигуна підключається перетворювач частоти, рис.2.98.
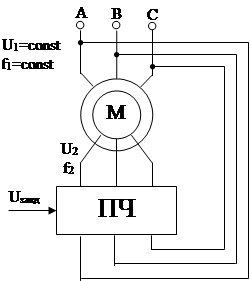 |
Рис.2.98.
Проте основний недолік каскадних схем залишається, а саме, збільшення потужності перетворювача пропорційно діапазону керування швидкістю. При широкому діапазоні керування, коли потужності перетворювача й двигуна зрівнюються, раціональніше застосовувати розглянуте частотне керування швидкістю, яке забезпечує кращу якість керування з використанням більш простішого двигуна з короткозамкненим ротором.
В усталеному режимі роботи швидкість двигуна визначається синхронними швидкостями магнітних полів статора та ротора
 , (2.114)
, (2.114)
де “–” – відповідає обертанню полів в одному напрямку;
“+” – відповідає обертанню полів у протилежних напрямках.
Зміна напрямку обертання полів здійснюється зміною чергування фаз напруги живлення ротора. Згідно (2.114) можливі два способи керування швидкістю при незмінних напрузі U1 та частоті f1 статора:
1) Незалежне завдання частоти ротора f2;
2) Незалежне завдання безпосередньо швидкості w.
1) В першому випадку величина швидкості двигуна визначається частотою ротора f2 і залишається незмінною
 ,
,
як і ковзання на конкретній характеристиці s=s0=const, тобто швидкість двигуна не залежить від навантаження, тому механічні характеристики абсолютно жорсткі. Такий режим роботи МПЖ називається синхронним режимом. Момент двигуна при цьому складається з асинхронного (2.83) та синхронного моментів при нехтуванні електричним опором ротора R1
 , (2.115)
, (2.115)
де L1 – індуктивність обмотки статора;
L12 – взаємоіндуктивність обмоток статора та ротора;
Q – кут зсуву між осями полів статора та ротора.
Таким чином при незмінній напрузі ротора U2 результуючий момент двигуна залежить від синхронного ковзання s0
 . (2.116)
. (2.116)
Найбільше значення моменту двигуна Мmax відповідає кутам  . Асинхронний момент, найбільший синхронний момент та максимальний момент двигуна показані пунктирними лініями на штучних механічних характеристиках, рис.2.99. Так як асинхронний момент змінює знак при зміні знаку s0, то перевантажувальна здатність двигуна в першій зоні керування (підсинхронні швидкості) суттєво відрізняється від другої зони (надсинхронні швидкості).
. Асинхронний момент, найбільший синхронний момент та максимальний момент двигуна показані пунктирними лініями на штучних механічних характеристиках, рис.2.99. Так як асинхронний момент змінює знак при зміні знаку s0, то перевантажувальна здатність двигуна в першій зоні керування (підсинхронні швидкості) суттєво відрізняється від другої зони (надсинхронні швидкості).
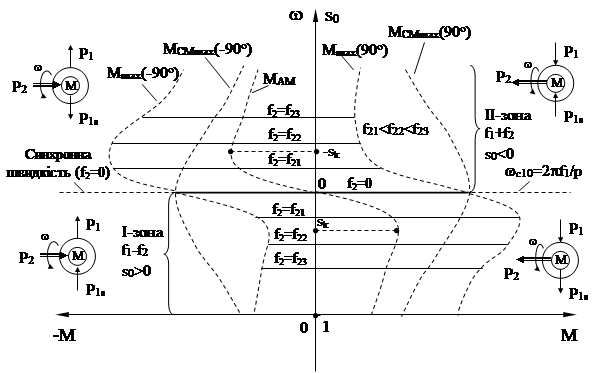 |
Рис.2.99.
Напрямки потоків механічної енергії на валі Р2, енергії ковзання в роторі Р1s та енергії статора Р1 представлено на рис.2.99 для роботи в рушійному режимі й режимі рекуперативного гальмування зі швидкостями в першій та другій зонах. Для їх забезпечення перетворювач частоти повинен мати двосторонню провідність та безконтактну зміну чергування фаз. При раціональному для МПЖ діапазоні керування швидкістю 2-3 частоту ротора необхідно змінювати в межах (0,2-0,3)f1н=10-15 Гц. Указані вимоги найкраще задовольняє перетворювач частоти з безпосереднім зв’язком. На розширення діапазону керування швидкості накладає обмеження також умова стійкої роботи МПЖ у межах критичних ковзань -sk<s0<sk , коли асинхронна складова моменту демпфірує коливання, які обумовлені синхронною складовою моменту. При ковзаннях більше критичних асинхронний момент навпаки розкачує ротор, що призводить до нестійкої роботи двигуна.
2) У другому випадку частота ротора залежить від швидкості двигуна, яка може змінюватися під дією навантаження. Цьому відповідає асинхронний режим роботи МПЖ. Для реалізації закону керування встановлюється датчик швидкості двигуна, наприклад, тахогенератор, за допомогою якого визначається частота ковзання. Для керування швидкості одночасно змінюється амплітуда та фаза напруги ротора за допомогою замкненої системи керування ЕП. Механічні характеристики в межах допустимого моменту представляють собою прямі із заданим статизмом.
Недоліком каскаду з ДПЖ є також необхідність перед початком керування здійснювати пуск двигуна до найменшої швидкості. Цей недолік не має суттєвого значення для механізмів, які рідко запускаються.
7) Керування швидкістю увімкненням додаткового резистора в коло статора.
Цей спосіб керування застосовується дуже рідко для двигунів із короткозамкненим ротором при відсутності інших засобів зменшити швидкість. Спосіб дуже неекономічний, тому використовується для короткочасної зміни швидкості. На рис.2.100 показано симетричне увімкнення додаткових резисторів у всі фази статора. Зміна опору здійснюється закорочуванням секцій реостата контакторами. Інколи для зменшення кількості елементів резистор вмикається тільки в одну чи дві фази статора.

Рис.2.100.
Збільшення електричного опору кола статора R1S=R1+Rд1 призводить до зменшення критичного ковзання (2.85), критичного та пускового моментів (2.86) та (2.84) при незмінній синхронній швидкості, рис.2.101.
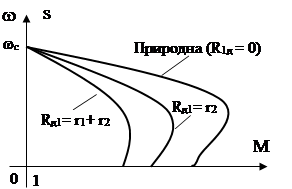 |
Рис.2.101.
2.2.1.2. Зміна напрямку руху (реверс) та пуск асинхронного двигуна
Для зміни напрямку руху трифазного асинхронного двигуна потрібно змінити напрямок обертання магнітного поля статора. Для цього достатньо поміняти місцями будь-які два виводи обмотки статора, рис.2.102.
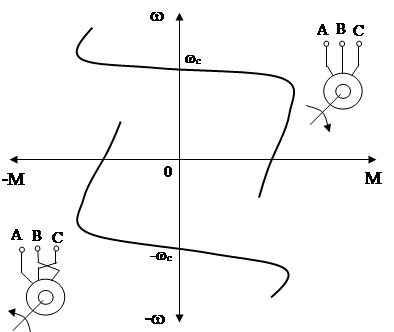 |
Рис.2.102.
Пуск двигуна з короткозамкненим ротором здійснюється прямим увімкненням у мережу (прямий пуск). При цьому пусковий струм статора може досягати I1п=(5¸7)I1н, що збільшує навантаження на мережу. Пуск декількох потужних двигунів найчастіше розноситься в часі за допомогою схем керування. Для обмеження пускового струму на час пуску в коло статора можуть підключатися струмообмежуючі реактори або в простішому випадку резистори Rco, рис.2.103.
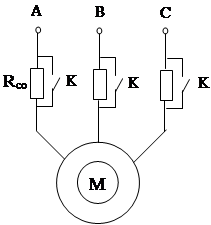 |
Рис.2.103.
Пуск двигунів із фазним ротором здійснюється за допомогою пускового реостата, який включається в коло ротора, рис.2.104. Кількість ступенів реостата визначається технологічними умовами і може досягати від 1 до 12.
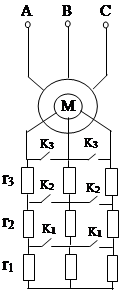 |
Рис.2.104.
Розрахунок опорів ступенів здійснюється за методикою, розглянутою в пункті 2.1.1.4 для двигунів постійного струму з незалежним збудженням, але замість відносного падіння швидкості Dw* у формули підставляється номінальне ковзання двигуна sн, а замість електричного опору якоря Rя підставляється опір ротору Rр, який може бути визначено за відомою формулою
 . (2.117)
. (2.117)
Найчастіше пуск здійснюється у функції часу за допомогою реле часу, за командами яких у заданій послідовності замикаються контактори К1-К3. Попередньо розраховується час роботи двигуна на кожній штучній характеристиці та встановлюються витримки реле часу.
Дата добавления: 2015-06-01; просмотров: 2986;