Динамическое торможение асинхронного двигателя.
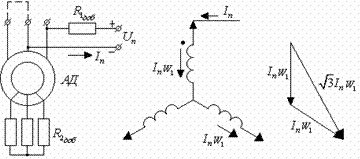
В современном асинхронном электродвигателе для осуществления динамического торможения двигатель отключается от сети переменного тока и включается по схеме рис.1:
a) б) в)
Рис. 1. К анализу режима динамического торможения.
Так как постоянный ток не зависит от тока ротора в статике, а при достаточно большом  и в динамике, то режим динамического торможения двигателя является частным случаем питания машины от источника тока при
и в динамике, то режим динамического торможения двигателя является частным случаем питания машины от источника тока при  и
и  (механическая характеристика рис.1а, пересекающая начало системы координат).
(механическая характеристика рис.1а, пересекающая начало системы координат).
Установим связь между током Iп и трёхфазным током I1, для которого было получено выражение механической характеристики. Условием эквивалентности является равенство МДС, создаваемых постоянным током Iп при данной схеме соединений и переменным током I1.
Из теории электрических машин согласно принципу образования кругового вращающегося магнитного поля в трёхфазной системе результирующая величина магнитной индукции в асинхронной машине определяется МДС, определяемой выражением 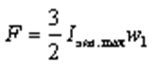 .
.
Поэтому можно написать (рис. 1. б и в):
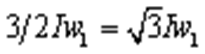 .
.
Отсюда:
Подставим равенства  в выражения для
в выражения для  и
и 

Статическая жёсткость механической характеристики:

Так как наклон механической характеристики с введением добавочных резисторов в цепь ротора увеличивается, то, в соответствии с выражением для жёсткости, её значение уменьшается.
Преимущества режима динамического торможения:
- Относительная простота осуществления способа;
- Возможность торможения до полной остановки вала ротора;
- Высокая эффективность торможения, особенно при использовании комбинированного метода.
Основным недостатком является необходимость наличия источника постоянного тока.
Дата добавления: 2015-06-10; просмотров: 1638;