Схема замещения асинхронной машины, векторная диаграмма, параметры схемы замещения
Схема замещения позволяет определить токи, потери мощности и падения напряжения в асинхронной машине. При этом нужно учитывать, что в обмотке вращающегося ротора проходит ток, действующее значение и частота которого зависят от частоты вращения. Из электрической схемы замещения ротора при его вращении (рис. 4.14, а) следует, что ток ротора
(4.30)
I2 = E2s /Z2 = E2s /√R22 + X22s.
При вращении ротора [см. (4.13а) и (4.12a)] ЭДС E2s в обмотке ротора и ее частота пропорциональны скольжению s. Следовательно, и индуктивное сопротивление обмотки ротора зависит от скольжения:
(4.31)
Х2s = 2πf2 L2 = 2πf1 L2 s = X2 s ,
где Х2 — индуктивное сопротивление обмотки заторможенного ротора.
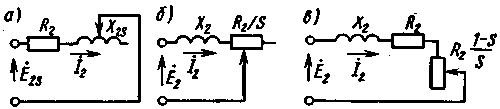
| Рис. 4.14. Схемы замещения ротора асинхронной машины |
Подставляя значения Е2s и Х2s в (4.30), получаем
(4.32a)
I2 = sE2 /√R22 + (sX2)2 .
В числителе и знаменателе (4.32а) есть переменная величина s, поэтому преобразуем его к виду
(4.32б)
I2 = E2 /√(R2 /s)2 + X22 .
Уравнению (4.326) соответствует электрическая схема замещения, показанная на рис. 4.14,6. Здесь ЭДС Е2 и индуктивное сопротивление Х2 неизменны, а активное сопротивление R2/s изменяется в зависимости от скольжения.
Схемы, представленные на рис. 4.14, а и б, с энергетической точки зрения не эквивалентны. Так, в схеме, приведенной на рис. 4.14, а, электрическая мощность ротора Рр равна электрическим потерям
(4.33a)
Рр = ΔРэл2 = m2 I22 R2 ,
а мощность, потребляемая в схеме, приведенной на рис. 4.14,6,
(4.33б)
Р'р = m2 I22 R2 /s.
Отношение этих мощностей
Рр /Р'р = ΔРэл2 /Р'р = m2 I22 R2 /(m2 I22 R2 /s ) = s .
Однако, поскольку s = ΔРэл2 /Рэм, получим, что Р'р = Рэм . Следовательно, электрическая мощность Р'р в схеме, представленной на рис. 4.14,6, равна всей электромагнитной мощности, подводимой от статора к ротору.
По известным величинам ΔРэл2 и Рэм можно определить и механическую мощность ротора:
(4.34)
Рмех = Рэм - ΔРэл2 = m2 I22 R2 /s - m2 I22 R2 = m2 I22 R2 (1 - s)/s.
Полученный результат наглядно представлен электрической схемой (рис. 4.14, в), в которой активное сопротивление обмотки ротора состоит из двух частей: R2 и R2(1 - s)/s. Первое сопротивление не зависит от режима работы, и потери в нем равны электрическим потерям реального ротора. Второе сопротивление зависит от скольжения, и мощность, выделяющаяся в нем, численно равна механической мощности двигателя. Таким образом, рассматриваемая схема замещения позволяет заменить реальный вращающийся ротор неподвижным, в цепь обмотки которого включено активное сопротивление, зависящее от частоты вращения ротора.
Полная схема замещения асинхронной машины при вращающемся роторе отличается от схемы замещения асинхронной машины с заторможенным ротором только наличием в цепи ротора активного сопротивления, зависящего от нагрузки (рис. 4.15, а). Эту схему замещения называют Т-образной. Следовательно, и в этом случае удается свести теорию асинхронной машины к теории трансформатора. Векторная диаграмма для Т-образной схемы замещения приведена на рис. 4.15,6.
Сопротивления Rm и Хт намагничивающего контура значительно меньше соответствующих значений для схемы замещения трансформатора, так как ток холостого хода асинхронного двигателя гораздо больше, чем у трансформатора. Если при рассмотрении работы трансформатора часто можно Пренебречь намагничивающим контуром, то при рассмотрении работы асинхронного двигателя этого сделать нельзя, так как ошибка может получиться значительной.
Можно упростить вычисления, преобразовав Т-образную схему замещения в Г-образную, как это показано на рис. 4.16, а. Подобные преобразования изучаются в курсе ТОЭ, поэтому математические выкладки здесь не приводятся.
Для Г-образной схемы замещения (рис. 4.16, а) имеем
Í1 = Í'0 + ( -Í''2 ); Í''2 = Í'2 /Ć1 ,
где Í'2 и Í''2 - токи рабочих контуров для Т-образной и Г-образной схем замещения.
| 
|
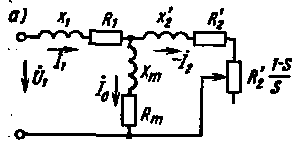

| Рис. 4.16. Схемы замещения асинхронной машины |
Появившийся в этой схеме замещения комплекс Ć1 == 1 + (R1 + jX1)/(Rm + jXm) практически всегда можно заменить модулем С1, который для асинхронных двигателей мощностью 10 кВт и выше равен 1,02 - 1,05. При анализе электромагнитных процессов в машинах общего применения часто полагают C1 ≈ 1, что существенно облегчает расчеты и мало влияет, на точность полученных результатов. Г-образную схему замещения при C1 = 1 называют упрощенной схемой замещениям вынесенным намагничивающим контуром (рис. 4.16,6). В этой схеме ток I''0 без большой погрешности можно приравнять току I0.
Параметры схемы замещения.
механическая мощность
линейное или фазное напряжение питания
линейный или фазный ток
скорость вращенияили скольжение
номинальный момент нагрузки
коэффициент мощности
коэффициент полезного действия
кратность максимального момента
кратность пускового момента
кратность пускового тока
Дата добавления: 2015-06-10; просмотров: 2543;