Систем управления. Существует чрезвычайно большое разнообразие систем, выполняющих те или иные функции по управлению самыми различными процессами во всех областях деятельности
Существует чрезвычайно большое разнообразие систем, выполняющих те или иные функции по управлению самыми различными процессами во всех областях деятельности человека. Однако принципы построения систем управления, принципы управления как и законы носят всеобщий характер. На сегодня различают четыре принципа управления:
1. Принцип разомкнутого цикла
2. Принцип замкнутого цикла или принцип обратной связи.
3. Комбинированный принцип.
4. Принцип адаптации.
Принцип разомкнутого цикла заключается в том, что требуемый закон управления формируется только на основе цели управления в соответствии с задающим воздействием. Управление, реализующее данный принцип, называется управлением по задающему воздействию. Система, построенная по этому принципу, является разомкнутой или незамкнутой.
Функциональная схема разомкнутой системы изображена на рис.1.1.
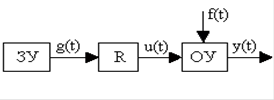
Рис. 1.1. Функциональная схема разомкнутой системы
Элементы системы:
ОУ – объект управления;
ЗУ – задающее устройство;
R – регулятор.
Координаты (переменные) системы:
g(t) – задающее воздействие;
y(t) – управляемая (регулируемая) величина;
f(t) – возмущающее воздействие;
u(t) – управляющее воздействие.
Объект управления - это техническое устройство или технологический процесс, некоторые физические величины которого поддерживаются неизменными или подлежат целенаправленным изменениям. Задающее устройство предназначено для формирования цели управления путем выработки задающего воздействия. Регулятор служит для формирования закона управления, в соответствии с которым выдает управляющее воздействие, прикладываемое к объекту управления для перевода последнего в требуемое состояние.
Входными величинами системы являются соответственно задающее и возмущающее воздействия. Задающее воздействие - это воздействие, определяемое целью управления, в соответствии с которым должна изменяться управляемая величина. Возмущающее воздействие представляет собой воздействие внешней среды на объект управления и, как правило, оказывает на него негативное влияние. Оно бывает объективно существующим и случайным. Выходной координатой системы является управляемая или регулируемая величина. Эта величина характеризует состояние объекта управления и подлежит стабилизации или изменению заданным образом в соответствии с целью управления. Для того чтобы управляемая величина принимала требуемые значения, необходимо к объекту управления приложить воздействие u(t) – управляющее воздействие. Управляющее воздействие формируется регулятором и прикладывается к объекту управления для того, чтобы последний перешел в нужное состояние. Следовательно, задача управления и состоит в формировании управляющего воздействия.
В разомкнутой системе, как следует из принципа разомкнутого цикла и функциональной схемы (рис.1.1), регулятор формирует управляющее воздействие только на основе задающего воздействия, т.е.
u(t) = F[g(t)]. (1.1)
Выражение (1.1) представляет собой закон управления разомкнутой системы.
Закон управления - это алгоритм или функциональная зависимость, в соответствии с которой регулятор формирует управляющее воздействие.
Характерным для разомкнутой системы является то, что процесс работы системы не зависит непосредственно от результата ее воздействия на управляемый объект. Отсюда главный недостаток разомкнутой системы - низкая точность работы.
По разомкнутому принципу работают многие известные всем автоматы, например, часы, банкомат, автомат, выбрасывающий какие-либо определенные предметы (билеты, шоколад) при опускании в него определенной комбинации монет и т.д. Примером такой системы может служить системы управления стрельбой из ружья или артиллерийского орудия.
Принцип замкнутого цикла (принцип обратной связи) заключается в том, что закон управления формируется на основе отклонения управляемой величины от задающего воздействия. Такое управление называется управлением по отклонению, при котором управляемая величина оказывает влияние на управляющее воздействие. Система, реализующая этот принцип, называется замкнутой или системой управления с обратной связью.
Функциональная схема замкнутой системы изображена на рис. 1.2.
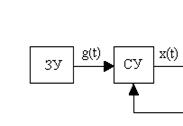
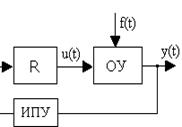
Рис. 1.2. Функциональная схема замкнутой системы
Элементы системы:
ОУ – объект управления;
ЗУ – задающее устройство;
ИПУ - измерительно-преобразовательное устройство;
СУ - сравнивающее устройство;
R – регулятор.
Координаты (переменные) системы:
g(t) – задающее воздействие;
y(t) – управляемая (регулируемая) величина;
f(t) – возмущающее воздействие;
x(t) - рассогласование (ошибка);
u(t) – управляющее воздействие.
Для получения замкнутой системы требуется разомкнутую систему “замкнуть” путем введения в нее дополнительных устройств: измерительно-преобразовательного и сравнивающего. Измерительно-преоб-разовательное устройство служит для измерения (наблюдения) управляемой величины и преобразования к виду, удобному для обработки и передачи. ИПУ реализует обратную связь, то есть связь причины и следствия, которая позволяет формировать управляющее воздействие с учетом результата управления. Сравнивающее устройство предназначено для сравнения управляемой величины с задающим воздействием и выдачи результата сравнения в виде сигнала рассогласования
x(t) = g(t) - y(t). (1.2)
Рассогласование представляет собой отклонение управляемой величины от задающего воздействия, т.е. является ошибкой системы, и служит источником формирования регулятором управляющего воздействия. Следовательно, закон управления в замкнутой системе является функцией рассогласования
u(t) = F[x(t)]. (1.3)
Управляющее воздействие прикладывается к объекту управления до тех пор пока x(t)®0.
Таким образом, замкнутая система работает так, чтобы все время сводить к нулю рассогласование x(t).
Принцип замкнутого цикла (обратной связи) – основной принцип управления. Он лежит в основе подавляющего большинства систем управления, так как решающую роль при управлении играет информация о результатах управления.
Основным достоинством замкнутых систем является их высокая точность, однако быстродействие их ниже, чем у разомкнутых систем.
Примерами замкнутых систем могут служить: система стабилизации температуры в холодильнике, автопилот, система самонаведения снаряда на цель, система обучения в высшей школе и т.д.
Комбинированный принцип заключается в сочетании принципов разомкнутого и замкнутого циклов в одной системе. Такое управление, сочетающее в себе управление по задающему воздействию и отклонению, называется комбинированным управлением. Оно обеспечивает высокую точность и высокое быстродействие. Система, реализующая комбинированный принцип, называется комбинированной.
Функциональная схема комбинированной системы представлена на рис. 1.3.
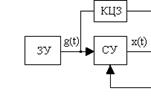
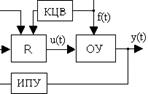
Рис. 1.3. Функциональная схема комбинированной системы
Для реализации комбинированной системы в замкнутую систему требуется включить дополнительные функциональные элементы: КЦЗ и КЦВ.
КЦЗ – компенсирующая цепь по задающему воздействию, позволяет скомпенсировать ошибку работы системы от задающего воздействия.
КЦВ – компенсирующая цепь по возмущающему воздействию, позволяет скомпенсировать негативное влияние возмущающего воздействия на работу системы.
Компенсирующие цепи представляют собой дифференцирующие устройства и служат для прогнозирования входных воздействий системы, что позволяет системе работать с предвидением. Благодаря этому, комбинированные системы обладают повышенной точностью и быстродействием.
Из функциональной схемы следует, что закон управления комбинированной системы имеет вид:
u(t) = F[x(t),g(t),f(t)]. (1.4)
В общем случае управляющее воздействие в комбинированной системе является функцией рассогласования, задающего и возмущающего воздействий. Кроме того, можно сделать комбинированную систему только по задающему воздействию, если
u(t) = F[x(t),g(t)], (1.5)
и только по возмущающему воздействию, если
u(t) = F[x(t),f(t)]. (1.6)
Комбинированное управление позволяет реализовывать инвариантные к внешним воздействиям системы управления.
Принцип адаптациизаключается в том, что системы, реализующие этот принцип, в процессе работы приспосабливаются, адаптируются к изменяющимся внешним условиям. Такое управление называется адаптивным, а системы, работающие в соответствии с данным принципом, называется адаптивными и являются самыми совершенными. Адаптивные системы имеют в своем составе, как правило, дополнительные блоки и контуры для анализа показателей качества процесса управления или внешних условий, по которым необходима адаптация.
Адаптивные системы разделяются на экстремальные, самонастраивающиеся и самоорганизующиеся.
Экстремальные системы или системы с самонастройкой программы.Это системы, которые сами ищут наивыгоднейшую программу, т.е. то значение управляемой величины, которое нужно в данный момент выдерживать, чтобы режим работы объекта управления был наилучшим по какому-либо параметру. При этом имеется в виду не выбор закона управления, а автоматическая установка задающего воздействия, такого, при котором обеспечивается наивыгоднейшее значение управляемой величины при изменяющихся внешних условиях работы системы. Таким образом, на экстремальную систему накладывается дополнительная задача автоматического поиска наивыгоднейшего значения требуемой управляемой величины, т.е. самой программы управления.
На рис. 1.4 приведена функциональная схема экстремальной системы.
Для получения экстремальной системы в замкнутую систему дополнительно включают УАПЭ - устройство автоматического поиска экстремума, которое анализирует параметр объекта управления r, определяющий его режим работы, и воздействует на задающее устройство с целью изменения задающего воздействия g(t) для обеспечения наивыгоднейшего режима работы объекта управления. Анализ параметра r и изменение задающего воздействия g(t) осуществляется до тех пор, пока r (параметр объекта управления, который оптимизируется) не примет экстремальное значение.
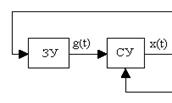
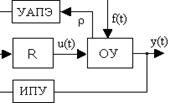
Рис. 1.4. Функциональная схема экстремальной системы
Примерами экстремальных систем могут служить: система автоматического поддержания максимальной скорости проходки скважины турбобуром при меняющихся свойствах грунта; автоматические системы управления различными производственными процессами, поддерживающие наивыгоднейший режим работы станков; система поддержания наивыгоднейшей скорости движения автомобиля, соответствующей минимуму расхода горючего на единицу длины пути и т.д.
Самонастраивающиеся системы с самонастройкой параметров.Это такие системы, в которых автоматически, не заданным заранее образом, в процессе работы в соответствии с изменением внешних условий изменяются какие-нибудь параметры регулятора таким образом, чтобы заданное качество работы системы сохранялось или обеспечивалось максимальное качество, возможное в данных реальных условиях. Эти системы работают по принципу самообучения. В процессе работы они изучают объект управления и обучаются управлять им наилучшим образом.
Простейшими самонастраивающимися системами являются системы ссамонастройкой параметров регулятора по задающему и возмущающему воздействиям (рис.1.5). Эти системы содержат в своем составе анализатор А для анализа задающего и возмущающего воздействий и контур настройки регулятора КН для настройки параметров регулятора в соответствии с заданным критерием.
Примерами самонастраивающихся систем могут служить радиотехнические системы с контурами автоматических регулировок усиления (АРУ) и подстроек частоты (АПЧ).
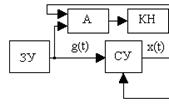
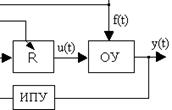
Рис. 1.5. Функциональная схема самонастраивающейся системы
Самоорганизующиеся системы или системы с самонастройкой структуры.Это системы, которые наилучших режимов работы достигают не изменением параметров регулятора, а путем изменения самой структуры регулятора не заданным заранее образом. В самоорганизующуюся систему закладывается лишь тот или иной определенный критерий качества работы системы или комбинация критериев для различных внешних условий работы системы. Система сама путем автоматического поиска выбирает такую структуру (из возможных, имеющихся в ее распоряжении), при которой удовлетворяется заданный критерий качества работы всей системы.
Примером систем с самонастройкой структурыявляютсядвухотсчетные системы, получившие широкое распространение. Эти системы имеют в своем составе два измерительных канала: грубого и точного отсчетов. Нужный измерительный канал выбирается системой в зависимости от величины рассогласования.
Кроме чисто технических автоматических систем аналогичные принципы действия заложены и в биологических системах, экономических системах и т.п., что изучается соответствующими направлениями кибернетики и общей теории систем управления.
Дата добавления: 2015-06-01; просмотров: 1565;