Регульовані об'єкти й автоматичні регулятори. Типи автоматичних систем. Вимоги, що ставляться до системи автоматичного регулювання.
1. Регульовані об'єкти й автоматичні регулятори.
У CAP під регульованим об'єктом розуміють елемент, який на вході обмежений точками прикладання вхідних діянь, а на виході - місцем установлення вимірника регульованої величини. До складу регульованого об'єкта іноді вводять регулювальні органи і засоби вимірювання регульованої величини (датчики). У таких випадках його називають узагальненим регульованим об'єктом. Решта елементів системи належить до автоматичного регулятора.
Властивості системи визначаються динамічними і статичними характеристиками як об'єкта, так і елементів регулятора. При аналізі об'єктів виділяють такі властивості: ємність, самовирівнювання, запізнювання і детектуючу здатність. Регульовані об'єкти бувають двох тинів - із зосередженими і розподіленими параметрами.
В об'єктах із зосередженими параметрами регульовані величини в усталеному режимі мають однакові значення і не залежать від точки вимірювання. Характер зміни регульованої величини в усіх трчках об'єкта у перехідному процесі однаковий. Більшість регульованих об'єктів належать до цього типу.
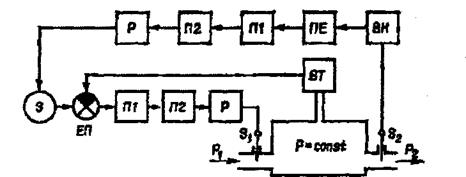
Рис, 2.7. Функціональне схемакомбінованої системи автоматичного регулювання.
Об'єкти з розподіленими параметрами характеризуються тим, що в них значення регульованих величин у довільних точках різні і в усталеному, і в перехідному режимах. Прикладами об'єктів з розподіленими параметрами є довгі трубопроводи з рухомою рідиною або газом, змійовики для нагрівання або охолодження рідини, електричні лінії тощо. У цих об'єктах регульована величина (тиск, температура, напруга) в перехідному процесі залежать як від часу, так і від довжини.
Під ємністю (акумулюючою властивістю) об'єкта розуміють здатність нагромаджувати речовину або енергію. У резервуарі з регульованим рівнем води, у паровому котлі ємність залежить від об'єму рідини. При обробці заготовки на металорізальному верстаті ємність визначатиметься масою заготовки і обертових елементів. Чим більша ємність, тим повільніше змінюватиметься регульована величина при порушенні балансу в об'єкті. Через ємність при появі різниці між припливом і витратою речовини або енергії регульована величина змінюється в часі. Від величини ємності залежить значення сталої часу об'єкта Т. Коли б регульована величина змінювалась з максимальною швидкістю, перехідний процес
закінчився б за час Т. Ємність об'єкта впливає на результати регулювання. У більшості випадків ємність полегшує завдання регулювання тим, що вихідна величина об'єкта не дуже швидко змінюється при порушенні балансу між припливом і витратою речовини або енергії. Однак при автоматичній зміні швидкості обертання оброблюваної деталі для забезпечення сталості швидкості різання на ділянках з різними діаметрами велика ємність об'єкта погіршує регулювання. Чим більша маса обертових елементів, тим довше триватиме перехідний Процес і процес різання з неоптимальною швидкістю.
Складні регульовані об'єкти можна зобразити з'єднанням певних фізичних ємностей і опорів (електричних, гідравлічних, теплових, магнітних). Поряд з одноємнісними, є й багатоємнісні регульовані об'єкти. Кількість ємностей визначається кількістю пар ємність - опір.
Самовирівнювання — це властивість регульованого об'єкта самостійно плавно змінювати регульовану величину до нового усталеного значення, якщо на вході прикладене ступінчасте діяння, і полегшувати роботу регулятора. Іноді воно буває таким, що регулятор практично не потрібний.
Регульований об'єкт із самовимірюванням показаний на рис. 2.8. Коли приплив рідини  дорівнює витраті
дорівнює витраті  регульована величина набирає значення Ні (рис. 2.8, а). Якщо збільшити приплив рідини на
регульована величина набирає значення Ні (рис. 2.8, а). Якщо збільшити приплив рідини на  рівень внаслідок
рівень внаслідок
нагромадження зростатиме, що супроводитиметься збільшенням витрати. Перехідний процес триватиме до вирівнювання припливу і витрати рідини. Після перехідного процесу самостійно (без регулятора) встановиться нове значення рівня Н2, яке трохи відрізняється від  (рис. 2,8, б). Такі регульовані об'єкти називають статичними, або стійкими.
(рис. 2,8, б). Такі регульовані об'єкти називають статичними, або стійкими.
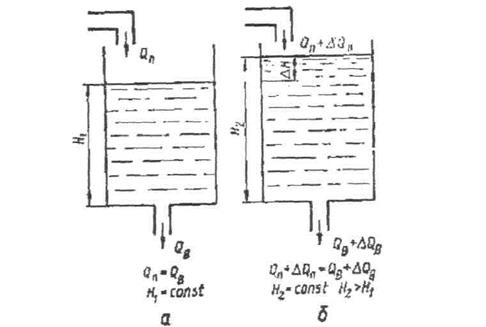
Рис.2.8. Регульований об'єкт, якому пластове самовквіанюиішня: а — при рівні Н1 : б — при рівні Н2,
Такий саме регульований об'єкт, що не має властивості самовирівнювання, показаний на рис. 2.9, Відмінністю тут є тільки те, що  Тільки в одному
Тільки в одному
випадку, коли  на виході об'єкта встановиться задане значення регульованої
на виході об'єкта встановиться задане значення регульованої
величини  Зміна припливу рідини на
Зміна припливу рідини на  спричинюється до того, що рівень Н
спричинюється до того, що рівень Н
стає функцією часу (рис. 2.9, б), збільшуючись до переливання або зменшуючись до повного звільнення резервуара. Нове значення регульованої величини самостійно ніколи не встановиться. Тільки автоматичний регулятор, змінюючи режим роботи насоса, може забезпечити задане значення Н. Об'єкти, яким не властиве самовирівнювання, називають астатичними, або нейтральними.
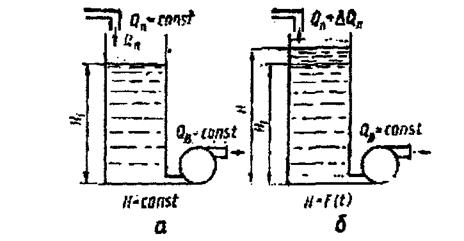
Рис. 2.9. Регулымммин уб'ек* без лшшиїрів* а— при рівні В— constt; б - при рівні Н - F(t)
Властивість регульованих об'єктів передавати діяння в одному напрямі називають детектуючою. Для нормальної роботи CAP потрібний хоча б один елемент, що має здатність направленої дії. Ним завжди буде регульований об'єкт, однак низка елементів автоматики також передає сигнали тільки зі входу на вихід.
Багато об'єктів мають чисте запізнювання, і діяння від входу до виходу передають з певним сталим, відставанням у часі, що характеризує переміщення середовища (енергії) від регулювального органа до датчика. Розрізняють також ємнісне запізнювання, зумовлене ємністю об'єкта. Повне запізнення регульованого об'єкта зображують сумою двох складових. Процесами керувати тим складніше, чим більше запізнення.
Пристрої, з яких складається автоматичний регулятор, без участі людини змінюють у регульованих об'єктах за заданим законом одну або кілька величин з певною точністю. Регулятори дуже різноманітні. До складу автоматичного регулятора входять датчик, елемент порівнювання, задавач, підсилювач, привод, регулювальний орган і джерело живлення. Можуть також входити стабілізуючі пристрої, показуючий або записуючий прилад. Мінімальна кількість елементів - це вимірювальний і регулювальний пристрої.
Конструктивно регулятори звичайно виконують з окремих уніфікованих елементів, які розосереджують по технологічних агрегатах і з'єднують між собою лініями зв'язку, У ряді випадків регулятори мають спеціальну конструкцію, їх виконують як невід'ємну частину машини або установки. Найпростіші регулятори прямої дії, в яких переставляння регулювального органа здійснюється енергією датчика. Для реалізації регулятора прямої дії треба, щоб датчик розвивав досить велику потужність. При недодержанні цієї умови застосовують регулятори непрямої дії з переставлянням регулювального органа виконавчим приводом, який споживає енергію від стороннього джерела. Розрізняють електричні, пневматичні, гідравлічні і комбіновані регулятори непрямої дії. Починають впроваджувати в промисловість мікропроцесорні регулятори.
Регулятор має реверсивність дії - здатність зменшувати або збільшувати
потік речовини чи енергії. Стійкості і потрібної якості системи досягають за
допомогою різних законів регулювання, за якими також класифікують регулятори.
Широко застосовують інтегральні (І-регулятори), пропорційні (П-регулятори),
пропорційно-інтегральні (ГП-регулятори), пропорційно-інтегральні з
випередженням (ПІД-регулятори). Більшість законів керування реалізовуються релейними, імпульсними, екстремальними та іншими регуляторами.
2. Типи автоматичних систем.
CAP складаються з регульованого об'єкта й автоматичного регулятора. Тому вони за класифікацією близькі до автоматичних регуляторів. Системи автоматичного регулювання класифікують за принципом дії (рис. 2.10), видом використовуваної енергії, характером сигналів, видом статичної характеристики та іншими ознаками.
Кожна з чотирьох груп CAP поділяється на підгрупи. Розімкнуті CAP представлені системами з жорсткою і гнучкою програмами, а також з діянням за збуренням. Системи автоматичного регулювання, в яких задавальним діянням є жорстка програма, мають сигнали, що формуються різними програмоносіями -кулачками, упорами, лінійними вимикачами, реле часу тощо. До цього класу CAP відносять дуже поширені в машинобудуванні системи циклового керування. До CAP з гнучкою програмою входять передусім металорізальні верстати з числовим програмним керуванням та інші подібні засоби. Характерною особливістю їх є гнучкість програми, що виконується звичайно на перфострічці. Перепрограмуванням можна легко переходити від випуску однієї деталі до іншої. Системи з діянням за збуренням зменшують вплив головних збурюючих діянь на процес регулювання. Звичайно компенсується вплив збурюючого діяння на об'єкт і не допускається великого відхилення регульованої величини від заданого значення.
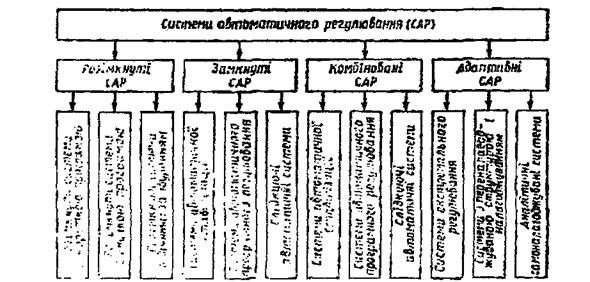
Рис. 2.1(1. Класифікацій снсгем автоматичного регулювання.
Замкнуті CAP охоплюють системи автоматичної стабілізації, системи автоматичного програмного регулювання та слідкуючі автоматичні системи. CAP автоматичної стабілізації мають стале задавальне діяння. У системах програмного регулювання задавальне діяння змінне і є відомою функцією часу, у слідкуючих CAP - функцією часу, але заздалегідь невідомою. Окремим випадком слідкуючих
систем є CAP, які підтримують потрібне співвідношення між двома або більшою кількістю величин.
Комбіновані CAP складаються з тих самих трьох підгруп систем. Вони мають додатково один або два розімкнутих контури керування, які компенсують вплив збурюючих діянь. Такі CAP забезпечують високу точність і швидкодію.
Самоналагоджувані (адаптивні) CAP охоплюють системи екстремального регулювання, системи з переналагоджуваною структурою і налагоджуванням, аналітичні Самоналагоджувані системи. Екстремальні системи подачею пошукового сигналу автоматично знаходять і підтримують максимальне або мінімальне значення регульованої величини (екстремум). Системи з переналагоджуваною структурою і налагоджуванням автоматично змінюють або структуру, або значення параметрів окремих елементів залежно від стану об'єкта або величини діянь. Властивості самоналагоджуваних систем змінюють на основі аналітичного визначення динамічних характеристик у процесі керування за допомогою засобів обчислювальної техніки.
За характером сигналів CAP поділяють на неперервні і дискретні (переривчастої дії). В усіх елементах першої групи систем сигнали є неперервною функцією часу. Дискретні системи регулювання неперервні величини перетворюють на переривчасті. Квантування здійснюють за рівнем сигналу, за часом, за рівнем і часом разом.
За видом характеристик елементів, що входять до CAP, розрізняють лінійні і нелінійні системи. Лінійною система буде в тому разі, коли вона охоплює тільки лінійні елементи. Включення до CAP хоча б одного нелінійного елемента перетворює систему на нелінійну.
За особливостями реакції CAP на сталі збурюючі діяння розрізняють статичні й астатичні системи. Статичні системи усталене значення регульованої величини змінюють залежно від рівня керуючого або збурюючого діянь. Виникаюча статична похибка визначається величиною незмінного в часі діяння. Астатичні CAP не мають статичної похибки. У них регульована величина в усталеному режимі не залежить від прикладених діянь.
Системи автоматичного регулювання поділяють на одноконтурні і багатоконтурні. Одноконтурні CAP мають тільки один головний зворотний зв'язок, а багато контурні - додаткові зворотні або місцеві зворотні зв'язки.
За кількістю регульованих величин CAP поділяють на одно-, дво- і багатовимірні. Багатовимірні CAP можуть бути системами незв'язаного і зв'язаного регулювання. Системи незв'язаного регулювання характеризуються тим, що регулятори різних величин не зв'язані один з одним і взаємодіють тільки через спільний регульований об'єкт. Такі системи можуть бути залежними або незалежними. У залежних CAP незв'язаного регулювання зміна однієї з регульованих величин впливає на значення інших. Регулювання різних величин в об'єкті у таких системах не можна розглядати ізольовано одне від одного. У незалежних системах незв'язаного регулювання вихідні величини не впливають одна на одну. Процеси регулювання різних величин у цих системах незалежні.
Системи зв'язаного регулювання мають кілька регуляторів, що зчленовані один з одним і взаємодіють між собою під час роботи поза об'єктом. Якщо в результаті взаємодії між регуляторами зміна однієї регульованої величини не спричинює зміни решти, систему зв'язаного регулювання називають автономною.
Дата добавления: 2015-05-16; просмотров: 3905;