Качество регулирования САУ
Качество работы САУ оценивают по величинам статической и динамической ошибок. По этим характеристикам автоматические системы бывают статические и астатические.
Статическая ошибка - это разность величин регулируемого параметра в исходном и конечном (после окончания регулирования) состояниях равновесия системы.
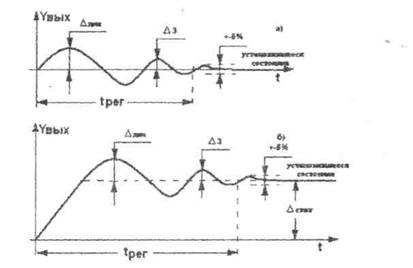
Рисунок 6.17-График регулирования астатической (а) и статической (б) САУ.
В астатической системе статическая ошибка равна нулю, т.е. система после процесса регулирования возвращается в исходное состояние равновесия. В астатических САУ конечное и исходное равновесие совпадает с заданием. Поэтому в этих САУ динамическая ошибка равна максимальному отклонению параметра в процессе регулирования (рис. 6.17а).
В статической системе в установившемся состоянии - через достаточно долгое время после начала регулирования т, всегда имеется статическая ошибка регулирования (рис.6.17б).
Динамическая ошибка - это максимальное в процессе регулирования отклонение регулируемого параметра от конечного состояния равновесия

Время регулирования - это отрезок времени ∆τс момента нанесения на замкнутую САУ возмущающего воздействия, по истечении которого отличие регулируемого параметра от конечного состояния равновесия становится равным и меньше ± 5% от заданной величины. Если заданная величина равна нулю, то ± 5% берут от величины динамической ошибки.
Перерегулирование - это динамическая ошибка, отнесённая к номинальной величине регулируемого параметра в процентах. Перерегулирование вычисляют по формуле:

Степень затухания - это показатель качества, который характеризует, насколько процентов уменьшается амплитуда колебаний выходного сигнала системы за один период колебаний. Степень затухания ψопределяется по формуле:

где: ∆3 - амплитуда колебаний третьего периода. Если ∆3 =0, то ψ= 100%.
Обобщённый показатель качества. Для определения величины этого показателя вычисляют интеграл (площадь подынтегральной фигуры) изменения в процессе регулирования выходного сигнала системы за период времени регулирования:

∆- амплитуду колебании берут в квадрате, чтобы просуммировать как положительные, так и отрицательные отклонения выходного сигнала. Естественно, чем меньше динамическая, статическая ошибки и время регулирования, тем меньше величина интеграла J и выше качество работы САУ.
Оптимальные процессы регулирования.
На практике часто требования к качеству работы проектируемой САУ задаются не в виде величины отдельных показателей качества, а в виде требования реализации одного из трёх оптимальных процессов регулирования.
Первый из них - апериодический процесс регулирования показан на рис. 6.18а.
Регулируемый параметр после отклонения плавно возвращается к заданной величине. В этом процессе по сравнению с двумя последующими будет минимально время регулирования, но максимальна динамическая ошибка. Второй - процесс регулирования с 20% перерегулированием условно дан на рис. 6.18б. В этом процессе по сравнению с апериодическим меньше динамическая ошибка, но больше время регулирования. Для этого процесса перерегулирование не должно превышать 20%.
Третий- процесс регулирования с минимальным интегральным показателем качества (рис. 6.18в). В этом процессе регулирования интегральный показатель качества сведён к минимуму, а из трёх рассмотренных оптимальных процессов регулирования будет минимальная динамическая ошибка, но время регулирования - максимальное.
Выбор оптимального процесса из трёх определяется видом технологического процесса объекта управления. Иногда кратковременная большая динамическая ошибка может быть очень опасна. Например, при управлении давлением пара в котле. Для такого объекта апериодический процесс не самый лучший. В некоторых случаях большое время перерегулирования может быть опасным для проведения операции - например, при выпечке хлеба значительное повышение температуры в печи не может быть длительным.
6.7 Синтез и коррекция САР
В ТАУ можно выделить две характерные задачи:
1) в заданной САУ найти и оценить переходные процессы -это задача анализа САУ;
2) по заданным переходным процессам и основным показателям разработать САУ - это задача синтеза САУ.
Вторая задача сложнее ввиду своей неоднозначности, многое определяется творческими способностями проектировщика. Поэтому обычно задача синтеза САУ ставится ограниченно. Считается, что основная часть системы уже задана, что обычно имеет место. Требуется синтезировать корректирующие звенья, то есть выбрать их схему и параметры. При этом необходимо, чтобы в результате коррекции САУ обеспечивался требуемый запас устойчивости, точность управления в установившихся режимах и качество управления в динамических режимах.
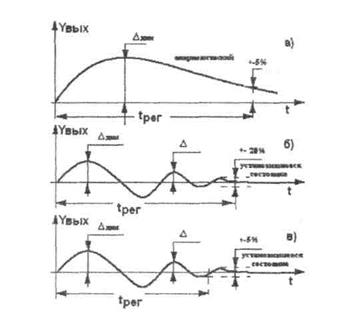
Рисунок 6.18 - Оптимальные процессы регулирования:
а) апериодический; б) колебательный с 20% перерегулированием;
в) колебательный с минимальным интегральным показателем качества
В тех случаях, когда устойчивость и необходимые качества не могут быть достигнуты путем изменения параметров системы (коэффициентов передачи, постоянных времени), то применяется коррекция. Коррекция представляет собой введение в систему дополнительных элементов, называемых корректирующими.
Корректирующие элементы (устройства) могут быть включены в структуру САР различными способами. Корректирующее устройство может быть включено в прямую цепь последовательно (рис.6.19).
Последовательные корректирующие устройства обычно применяют в тех случаях, когда сигнал управления представляет собой напряжение постоянного тока. Если корректирующее устройство вводит производную от сигнала рассогласования ∆, то происходит увеличение запаса устойчивости и повышение качества переходного процесса. При введении интеграла и производ ной от сигнала рассогласования обеспечивается астатизм в сочетании с сохранением устойчивости и качества переходной характеристики.
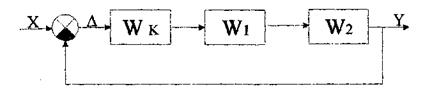
Рисунок 6.19 - Последовательная коррекция.
Применяется также включение корректирующего устройства в виде обратной связи (рис.6.20).
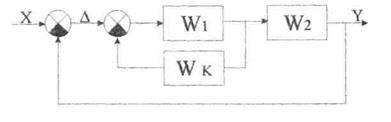
Рисунок 6.20 - Коррекция в виде обратной связи.
Обычно параметры корректирующего устройства выбирают таким образом, чтобы выполнялось соотношение:

В этом случае свойства участка цепи, где включена коррекция и изменены её параметры, не оказывают влияния на свойства всей системы. Это важное свойство является причиной широкого применения коррекции в виде обратной связи. Обратная связь здесь обычно является отрицательной.
Применяется третий способ коррекции - параллельный (рис.6.21).
Параллельная коррекция имеет меньшие возможности, чем две предыдущие разновидности.
Вместе с тем параллельное корректирующее устройство при меньшей сложности обеспечивает нужное преобразование сигнала рассогласования.
Выбор параметров корректирующих устройств производится исходя из критериев устойчивости и проверяется по оценкам качества переходных процессов.
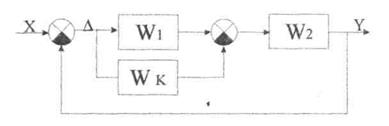
Рисунок 6.21 - Параллельная коррекция.
Модуль 2 «Технические средства автоматики»
Лекция № 7. «Элементная база устройств автоматики»
Дата добавления: 2015-04-21; просмотров: 7469;