Фундаментальные принципы управления
Принято различать три фундаментальных принципа управления: принцип разомкнутого управления, принцип компенсации, принцип обратной связи.
Одномерными называются системы с одной регулируемой величиной.
Многомерными называются системы с несколькими регулируемыми величинами и они используются для управления многомерными объектами регулирования, нормальное функционирование которых требует изменения по заданному закону не менее двух физических величин.
Принцип разомкнутого управления. Рассмотрим САУ хлебопекарной печи (рис.2.1). Ее принципиальная схема показывает принцип действия данной конкретной САУ, состоящей из конкретных технических устройств. Принципиальные схемы могут быть электрическими, гидравлическими, кинематическими и т.п. Технология выпечки требует изменения температуры в печи по заданной временной программе, в частном случае требуется поддержание постоянной температуры.
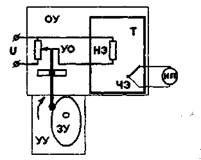
U- напряжение электрической сети; НЭ- нагревательный элемент; ОУ-объект управления; УО- управляющий орган объекта (реостат); ЗУ- задающее устройство; УУ- устройство управления; ИП- измерительный прибор; ЧЭ- чувствительный элемент; Т- температура в печи.
Рисунок 2.1- САУ хлебопекарной печи
Для этого надо реостатом регулировать напряжение на нагревательном элементе НЭ. Подобная часть ОУ, с помощью которой можно изменять параметры управляемого процесса, называется управляющим органом объекта (УО). Это может быть реостат, вентиль, заслонка и т.п.
Часть ОУ, которая преобразует управляемую величину в пропорциональную ей величину, удобную для использования в САУ, называют чувствительным элементом (ЧЭ). Физическую величину на выходе ЧЭ называют выходной величиной ОУ. Как правило, это электрический сигнал (ток, напряжение) или механическое перемещение. В качестве ЧЭ могут использоваться термопары, тахометры, рычаги, электрические мосты, датчики давления, деформации, положения и т.п. В нашем случае это термопара, на выходе которой формируется напряжение, пропорциональное температуре в печи, подаваемое на измерительный прибор ИП для контроля. Физическую величину на входе управляющего органа ОУ называют входной величиной ОУ.
Управляющее воздействие u(t) - это воздействие, прикладываемое к УО объекта с целью поддержания требуемых значений управляемой величины. Оно формируется устройством управления (УУ). Ядром УУ является исполнительный элемент, в качестве которого могут использоваться электрические двигатели, мембраны, электромагниты и т.п.
Задающим устройством (ЗУ) называется устройство, задающее программу изменения управляющего воздействия, то есть формирующее задающий сигнал u0(t). В простейшем случае u0(t) = U - постоянная величина. ЗУ может быть выполнено в виде отдельного устройства, быть встроенным в УУ или же вообще отсутствовать. В качестве ЗУ может выступать кулачковый механизм, магнитофонная лента, маятник в часах, задающий профиль и т.п. Роль УУ и ЗУ может исполнять человек. Однако это уже не САУ. В нашем примере УУ является кулачковый механизм, перемещающий движок реостата согласно программе, которая задается профилем кулачка.
Рассмотренную САУ можно представить в виде функциональной схемы, элементы которой называются функциональными звеньями. Эти звенья изображаются прямоугольниками, в которых записывается функция преобразования входной величины в выходную (рис.2.2). Эти величины могут иметь одинаковую или различную природу, например, входное и выходное электрическое напряжение, или электрическое напряжение на входе и скорость механического перемещения на выходе и т.п.

Рисунок 2.2 - Функция преобразования входной величины u в выходную y
Величина f, подаваемая на второй вход звена, называется возмущением. Она отражает влияние на выходную величину у изменений окружающей среды, нагрузки и т.п
В общем случае функциональное звено может иметь несколько входов и выходов (рис.2.3). Здесь u1, u2,..., un - входные (управляющие) воздействия; f1, f2,..., fk - возмущающие воздействия; у1, у2,..., уm - выходные величины.
Принцип работы функциональных звеньев может быть различным, поэтому функциональная схема не дает представление о принципе действия конкретной САУ, а показывает лишь пути прохождения и способы обработки и преобразования сигналов.
Сигнал - это информационное понятие, соответствующее на принципиальной схеме физическим величинам. Пути его прохождения указываются направленными отрезками (рис.2.4). Точки разветвления сигнала называются узлами. Сигнал определяется лишь формой изменения физической величины, он не имеет ни массы, ни энергии, поэтому в узлах он не делится (рис. 2.4а), и по всем путям от узла идут одинаковые сигналы, равные сигналу, входящему в узел. Суммирование сигналов осуществляется в сумматоре (рис. 2.46), вычитание - в сравнивающем устройстве, рис 2.4в.
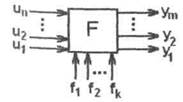
Рисунок 2.3 - Функциональное звено с несколькими входами и выходами
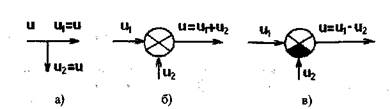
Рисунок 2.4 - Прохождение сигнала по узлам САУ: а - ветвление; б - суммирование; в - вычитание.
САУ хлебопекарной печи можно изобразить функциональной схемой (рис.2.5). В данной схеме заложен принцип разомкнутого управления, сущность которого состоит в том, что программа управления во времени t жестко задана ЗУ; управление не учитывает влияние возмущений на параметры процесса.
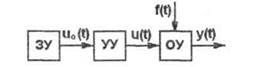
Рисунок 2.5 - Функциональная схема САУ хлебопекарной печи.
Примерами систем, работающих по принципу разомкнутого управления, являются часы, магнитофон компьютер и т.п.
Принцип компенсации. Если возмущающий фактор искажает выходную величину до недопустимых пределов, то применяют принцип компенсации (рис.2.6, КУ - корректирующее устройство). Пусть у0 - значение выходной величины, которое требуется обеспечить согласно программе. На самом деле из-за возмущения f на выходе регистрируется значение у.
Величина
ε= у0 - у
называется отклонением от заданной величины. Если каким-то образом удается измерить величину f то можно откорректировать управляющее воздействие и на входе ОУ, суммируя сигнал УУ с корректирующим воздействием, пропорциональным возмущению f и компенсирующим его влияние. Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п.
На рис. 2.6 в цепи нагревательного элемента НЭ стоит термосопротивление Rt, величина которого меняется в зависимости от колебаний температуры окружающей среды, корректируя напряжение на НЭ.
Достоинство принципа компенсации: быстрота реакции на возмущения. Он более точен, чем принцип разомкнутого управления. Недостаток - невозможность учета подобным образом всех возможных возмущений
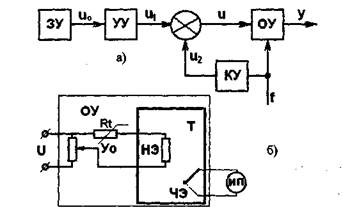
Рисунок 2.6 - САУ с компенсацией возмущающего сигнала: а - функциональная схема; б - СА хлебопекарной печи.
Принцип обратной связи. Наибольшее распространение в технике получил принцип обратной связи (рис.2.7). Здесь управляющее воздействие корректируется блоком КУ в зависимости от выходной величины у. И уже не важно, какие возмущения действуют на ОУ.
Если значение у отклоняется от требуемого, то происходит корректировка сигнала и с целью уменьшения данного отклонения. Связь выхода ОУ с его входом называется главной обратной связью (ОС). В частном случае (рис.2.8) ЗУ формирует требуемое значение выходной величины у0, которое сравнивается с действительным значением на выходе САУ у.
Отклонение
ε= у0 – у
с выхода сравнивающего устройства подается на вход регулятора Р, объединяющего в себе УУ, УО, ЧЭ. Если ε≠0, то регулятор формирует управляющее воздействие u, действующее до тех пор, пока не обеспечится равенство ε=0, или у = у0.
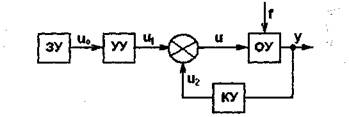
Рисунок 2.7 - САУ с обратной связью
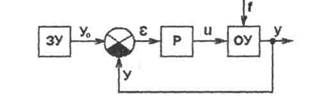
Рисунок 2.8 - САУ с обратной связью по отклонению выходной величины от заданной
Так как на регулятор подается разность сигналов, то такая обратная связь называется отрицательной в отличие от положительной обратной связи, когда сигналы складываются. Такое управление в функции отклонения называется регулированием, а подобную САУ называют системой автоматического регулирования (САР). Так, на рис. 2.9 изображена упрощенная схема САР хлебопекарной печи.
Роль ЗУ здесь выполняет потенциометр, напряжение на котором U3 сравнивается с напряжением на термопаре UT. Их разность ∆U через усилитель Ус подается на исполнительный двигатель ИД, регулирующий через редуктор положение движка реостата в цепи НЭ. Наличие усилителя говорит о том, что данная САР является системой непрямого регулирования, так как энергия для функций управления берется от посторонних источников питания в отличие от систем прямого регулирования, в которых энергия берется непосредственно от ОУ, как, например, в САР уровня воды в баке (рис.2.10).
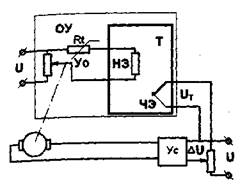
Рисунок 2.9 - Упрощенная схема САР хлебопекарной печи с регулятором.
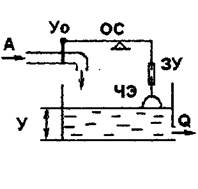
Рисунок 2.10 - САР уровня воды в баке
Для поддержания постоянного уровня воды в баке Y используется чувствительный элемент ЧЭ в виде поплавка, постоянно находящегося на ее поверхности. При увеличении расхода воды Q ее уровень У начинает понижаться. Поплавок ЧЭ перемещается вниз и через тягу ЗУ (задающее устройство) и рычаг ОС (отрицательная обратная связь) воздействует на управляющий орган УО (заслонка), который увеличивает подачу воды А в бак. Увеличение подачи А приводит к поднятию уровня У воды в баке. В результате чего поплавок поднимается и закрывает заслонку УО. Подача воды уменьшается, и уровень воды стабилизируется вокруг заданного уровня, изменяемого длиной тяги ЗУ. Недостатком принципа обратной связи является инерционность системы.
Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов: быстроту реакции на возмущение принципа компенсации и точность регулирования независимо от природы возмущений принципа обратной связи.
Системы, содержащие одну или несколько местных обратных связей, называются многоконтурными. В этих системах воздействие, приложенное к тому или иному элементу, может обойти всю систему и вернуться в исходную точку по нескольким путям обхода.
2.2. Основные виды САУ
В зависимости от принципа и закона функционирования ЗУ, задающего программу изменения выходной величины, различают основные виды САУ:
- стабилизации;
- программные;
- следящие;
- самонастраивающиеся:
- экстремальные;
- оптимальные;
- адаптивные.
В системах стабилизации (рис.2.9,2.10) обеспечивается неизменное значение управляемой величины при всех видах возмущений, т.е. у = const. ЗУ формирует эталонный сигнал, с которым сравнивается выходная величина. ЗУ, как правило, допускает настройку эталонного сигнала, что позволяет менять по желанию значение выходной величины.
В программных системах обеспечивается изменение управляемой величины в соответствии с программой, формируемой ЗУ. В качестве ЗУ может использоваться кулачковый механизм, устройство считывания с перфоленты или магнитной ленты и т.п. К этому виду САУ можно отнести заводные игрушки, магнитофоны, проигрыватели и т.п. Различают системы с временной программой (например, рис.2.1), обеспечивающие y=f(t), и системы с пространственной программой, в которых у =f(x), применяемые там, где на выходе САУ важно получить требуемую траекторию в пространстве, например, в копировальном станке (рис.2.11), закон движения во времени здесь роли не играет, где t - время, х -координата точки.
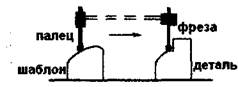
Рисунок 2.11 - САУ с пространственной программой
Следящие системы отличаются от программных лишь тем, что программа у =f(t) или y =f(x) заранее неизвестна. В качестве ЗУ выступает устройство, следящее за изменением какого-либо внешнего параметра. Эти изменения и будут определять изменения выходной величины САУ. Например, рука робота, повторяющая движения руки человека.
Все три рассмотренных вида САУ могут быть построены по любому из трех фундаментальных принципов управления. Для них характерно требование совпадения выходной величины с некоторым предписанным значением на входе САУ, которое само может меняться. То есть в любой момент времени требуемое значение выходной величины определено однозначно.
В самонастраивающихся системах ЗУ ищет такое значение управляемой величины, которое по какому-то критерию (или нескольким) является оптимальным.
Так, в экстремальных системах (рис.2.12) требуется, чтобы выходная величина всегда принимала минимальное или максимальное значение из всех возможных, которое заранее не определено и может непредсказуемо изменяться. Для его поиска система выполняет небольшие пробные движения и анализирует реакцию выходной величины на эти пробы.
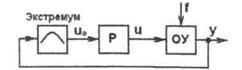
Рисунок 2.12 - Самонастраиваемая САУ.
После этого вырабатывается управляющее воздействие, приближающее выходную величину к экстремальному значению. Процесс повторяется непрерывно. Так как в данных САУ происходит непрерывная оценка выходного параметра то они выполняются только в соответствии с третьим принципом управления - принципом обратной связи.
Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило, сложная обработка информации о характере изменения выходных величин и возмущений, о характере влияния управляющих воздействий на выходные величины, может быть задействована теоретическая информация, информация эвристического характера и т.п. Поэтому основным отличием экстремальных систем является наличие в них ЭВМ. Эти системы могут работать в соответствии с любым из трех фундаментальных принципов управления.
В адаптивных системах предусмотрена возможность автоматической перенастройки параметров или изменения принципиальной схемы САУ с целью приспособления ее к изменяющимся внешним условиям.
Лекция №3. «Режимы работы САУ»
Дата добавления: 2015-04-21; просмотров: 3172;