Исследование ИНДУКТИВНЫХ И ТРАНСФОРМАТОРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПЕРЕМЕЩЕНИЯ
Подписано в печать 27.01.2014
Формат 60  84 /1 16. Бумага типограф.
84 /1 16. Бумага типограф.
Печать офсетная.
Уч.- изд. л. 4,75.
Тираж 500 экз.
Заказ №
Рязанский институт (филиал) Федерального государственного бюджетного образовательного учреждения высшего профессионального образования «МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ МАШИНОСТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ (МАМИ)»
390000, г. Рязань, ул., Право-Лыбедская, 26/53.
Исследование ИНДУКТИВНЫХ И ТРАНСФОРМАТОРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПЕРЕМЕЩЕНИЯ
Индуктивные преобразователи
Индуктивные преобразователи нашли широкое применение для преобразования пространственных физических величин (линейных или угловых перемещений) в электрический сигнал.
Принцип работы ИП основан на изменении самоиндукции катушки (  ) при изменении магнитного сопротивления его магнитной цепи. Изменение магнитного сопротивления происходит в результате изменения параметров воздушного зазора под действием входного сигнала.
) при изменении магнитного сопротивления его магнитной цепи. Изменение магнитного сопротивления происходит в результате изменения параметров воздушного зазора под действием входного сигнала.
Схема простейшего ИП приведена на рис. 1а и представляет собой катушку самоиндукции W с ферромагнитным сердечником 1 и якорем 2, отделенным от сердечника воздушным зазором  . Магнитное сопротивление зазора
. Магнитное сопротивление зазора  измениться в результате изменения величины воздушного зазора или его площади поперечного сечения
измениться в результате изменения величины воздушного зазора или его площади поперечного сечения  . Катушка соединена с нагрузкой
. Катушка соединена с нагрузкой  и источником переменного напряжения
и источником переменного напряжения  .
.
Сердечник и якорь изготавливают из магнитомягких материалов с малыми потерями на гистерезис. Для уменьшения потерь на вихревые токи сердечник и якорь набирают из отдельных изолированных друг от друга пластин.

Рис. 1, а. Простейший индуктивный преобразователь
Потери на гистерезис и вихревые токи (потери в стали  ) обуславливают комплексный характер магнитного сопротивления
) обуславливают комплексный характер магнитного сопротивления  .
.
 (1.2.1)
(1.2.1)
где  – активное сопротивление магнитной цепи,
– активное сопротивление магнитной цепи,  – реактивная составляющая магнитного сопротивления.
– реактивная составляющая магнитного сопротивления.
Если пренебречь потоками рассеяния и выпучиванием потока в воздушном зазоре , будет складываться из активного магнитного сопротивления сердечника, якоря
 (1.2.2)
(1.2.2)
и двух воздушных зазоров
 , (1.2.3)
, (1.2.3)
где соответственно –  ,
,  , – длина сердечника, якоря и воздушного зазора в м;
, – длина сердечника, якоря и воздушного зазора в м;
 ,
,  , – сечение сердечника, якоря и воздушного зазора в
, – сечение сердечника, якоря и воздушного зазора в  ;
;
 ,
,  – абсолютная магнитная проницаемость материала сердечника и якоря в Гн/м;
– абсолютная магнитная проницаемость материала сердечника и якоря в Гн/м;
 – магнитная проницаемость вакуума.
– магнитная проницаемость вакуума.
Реактивная составляющая магнитного сопротивления определяется потерями в стали и при отсутствии или слабом проявлении поверхностного эффекта может быть найдена по формуле
 , (1.2.4)
, (1.2.4)
где  – круговая частота питающего напряжения;
– круговая частота питающего напряжения;
Ф – действующее значение магнитного потока.
Индуктивность (коэффициент самоиндукции) катушки также будет комплексной величиной
 , (1.2.5)
, (1.2.5)
где y – потокосцепление;
J – ток катушки;
 – -модуль комплексного магнитного сопротивления.
– -модуль комплексного магнитного сопротивления.
Тогда сопротивление катушки индуктивности
 , (1.2.6)
, (1.2.6)
где  – активное сопротивление обмотки катушки.
– активное сопротивление обмотки катушки.
Из формулы (1.2.6) видно, что учет потерь в стали эквивалентен увеличению потерь в катушке из-за увеличения ее активного сопротивления.
Потери в стали определяются выбранным материалом, конструкцией магнитной цепи, его режимом работы и в ИП должны быть незначительными. Применение магнитопроводов из набора отдельных пластин, материалов магнитопровода с узкой петлей гистерезиса и выбор незначительных рабочих магнитных индукций (0.1÷0.3 Tл) существенно снижают потери в стали.
Для упрощения анализа работы простейшего ИП пренебрежем потерями в стали, магнитным сопротивлением стали  , так как при малых зазорах
, так как при малых зазорах  , Пусть имеем
, Пусть имеем  и
и  , тогда получим, что эффективное значение тока в нагрузке
, тогда получим, что эффективное значение тока в нагрузке
 (1.2.7)
(1.2.7)
линейно зависит от перемещения якоря (d) (пунктирная линия на рис.1б). Реальная ФП (сплошная линия на рис. 1б) отличается от полученной идеализированной в области малых и больших перемещений, что обусловлено пренебрежением и  ,
,  .
.
Простейшие ИП имеют существенные недостатки:
– нереверсивность;
– наличие значительного нулевого сигнала (  );
);
– нелинейность ФП;
– большое тяговое усилие;
– значительный фазовый сдвиг выходного сигнала.
Рис. 1, б. Функция преобразования простейшего ИП
Поэтому они отдельно применяются редко, а являются составной частью дифференциальных конструкций, у которых якорь является общим для обеих половин ИП. Электрические схемы формирования сигнала выполняются по дифференциальной (рис.2, а) или мостовой схемам (рис.2, б).
а
б
Рис. 2. Электрическая схема ИП: а – дифференциальная; б – мостовая
Рассмотрим работу реверсивного ИП, включенного по дифференциальной схеме.
Схема состоит из дифференциального трансформатора Тр1, двух индуктивностей  и
и  простейших ИП, соединенных на общую нагрузку . Входным сигналом является перемещение (
простейших ИП, соединенных на общую нагрузку . Входным сигналом является перемещение (  ) от среднего положения общего якоря.
) от среднего положения общего якоря.
Выходным сигналом является разность токов в нагрузке или падение напряжений на ней.
Определим ФП  , где
, где  , тогда для приведенной схемы имеем
, тогда для приведенной схемы имеем
 (1.2.8)
(1.2.8)
Токи  и
и  определим, используя принцип наложения
определим, используя принцип наложения
 , (1.2.9)
, (1.2.9)
 , (1.2.10)
, (1.2.10)
где  – внутреннее сопротивление источника напряжения, которое принимаем одинаковым для обеих половин дифференциального трансформатора;
– внутреннее сопротивление источника напряжения, которое принимаем одинаковым для обеих половин дифференциального трансформатора;
 ,
,  – сопротивления половин простейших ИП с индуктивностями и .
– сопротивления половин простейших ИП с индуктивностями и .
Подставим (1.2.9) и (1.2.10) в (1.2.8), получим:
 (1.2.11)
(1.2.11)
Обычно внутреннее сопротивление дифференциального источника напряжения гораздо меньше, чем остальные сопротивления рассматриваемой цепи, также и активные составляющие сопротивлений ИП , . Для упрощения расчета, кроме специальных случаев, сопротивление нагрузки выбирают активным, то есть  .
.
Тогда, пренебрегая и считая, что  ,
,  , получим выражение напряжения на нагрузке
, получим выражение напряжения на нагрузке
 (1.2.12)
(1.2.12)
Если пренебречь так же, как и для простейших ИП, потерями в стали, потоками рассеяния и магнитным сопротивлением стали якоря и сердечника, тогда получим в первом приближении индуктивности и .
 ,
,  , (1.2.13)
, (1.2.13)
где  – число витков катушек индуктивности;
– число витков катушек индуктивности;
 – площадь воздушного зазора;
– площадь воздушного зазора;
 – площадь воздушного зазора при
– площадь воздушного зазора при  .
.
Тогда, подставив (1.2.13) в (1.2.12) и проведя преобразования, получим
 (1.2.14)
(1.2.14)
или модуль действующего значения выходного напряжения
 , (1.2.15)
, (1.2.15)
где  – чувствительность дифференциального ИП по напряжению.
– чувствительность дифференциального ИП по напряжению.
Из (1.2.15) видно, что так же, как и для простейшего ИП в первом приближении получили линейную зависимость ФП (рис. 3, пунктирная линия). Реальная ФП (рис. 3, сплошная линия) будет нелинейной при больших значениях входного сигнала по тем же причинам, что и для простейшего ИП, но уже имеет больший линейный участок ФП. Максимальная чувствительность получиться при холостом ходе, т.е.  .
.
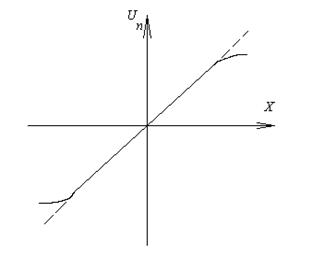
Рис. 3. Функция преобразования дифференциального ИП
Тяговое усилие у дифференциального ИП гораздо меньше, так как представляет разность тяговых усилий простейших ИП. Фаза выходного напряжения изменяется на 180° при переходе через нулевое положение. Практически не удается получить нулевое значение выходного сигнала при среднем положении якоря, т.к. нельзя добиться абсолютной симметрии (геометрической, магнитной, электрической) отдельных простейших ИП. Кроме того, в силу нелинейности кривых намагничивания материалов сердечника и якоря в выходном «нулевом» сигнале будет присутствовать напряжение четных гармоник.
ИП конструктивно выполняются как для преобразования линейного перемещения, так и углового. Различные конструктивные варианты ИП приведены на планшете лабораторного стенда.
Дата добавления: 2015-03-07; просмотров: 1499;