Индукционные моментные преобразователи
Индукционные моментные преобразователи представляют собой двухфазные асинхронные двигатели с короткозамкнутым ротором, работающие в заторможенном режиме и имеющие много общего с управляемым асинхронным двигателем. Отличие от управляемых асинхронных двигателей определяется тем, что моментные преобразователи в основном работают без редукторов и поэтому не имеют подшипниковых узлов, а выполняются в виде двух разделенных частей: статора и ротора, которые закрепляются на неподвижные и подвижные части измерительного устройства, например, гироскопического.
На статоре преобразователя располагаются две смещенные в пространстве на 90 градусов обмотки возбуждения (  ) и управления (
) и управления (  ) (рис 4).
) (рис 4).
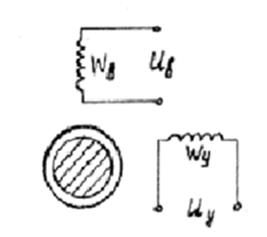
Рис. 4 Схема моментного индукционного преобразователя
Ротор преобразователя выполняется в виде немагнитного полого стакана (рис. 5а) или диска, либо обмедненного ферромагнитного цилиндра. В этом случае получается наибольшая его электрическая симметрия и уменьшается «нулевой момент».
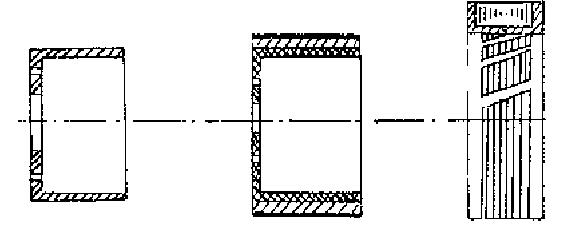
а) б) в)
Рис. 5 Различные варианты роторов МП
Для увеличения чувствительности иногда применяют ротор типа беличья клетка, выполненный как и у обыкновенных асинхронных двигателей из шихтованной стали, но при этом для уменьшения «нулевого момента» обмотки ротора должны иметь сравнительно большое активное сопротивление.
Обмотка возбуждения во время работы постоянно подключена к источнику переменного напряжения с номинальным действующим значением  , а на обмотку управления подается управляющее напряжение
, а на обмотку управления подается управляющее напряжение  , которое сдвинуто по фазе на некоторый угол
, которое сдвинуто по фазе на некоторый угол  по отношению к напряжению возбуждения.
по отношению к напряжению возбуждения.
В результате этого обмотки образуют элептически вращающееся магнитное поле, которое при взаимодействии с коротко замкнутым ротором создает вращающий момент.
Величина момента при насыщенной магнитной системе определяется по формуле:
 (1.2.4)
(1.2.4)
где  – коэффициент пропорциональности.
– коэффициент пропорциональности.
Обозначим через  момент при круговом поле
момент при круговом поле
(  ;
;  ),
),
тогда:
 (1.2.5)
(1.2.5)
где  ,
,  – коэффициент управления
– коэффициент управления
Номинальный момент преобразователя  при круговом вращающемся магнитном поле (рис. 4б) находится из выражения:
при круговом вращающемся магнитном поле (рис. 4б) находится из выражения:
 (1.2.6)
(1.2.6)
где m – количество фаз питающего напряжения;
p – число пар полюсов статора;
 – частота питающего напряжения;
– частота питающего напряжения;
 – ток в цепи эквивалентной схемы при круговом поле;
– ток в цепи эквивалентной схемы при круговом поле;
 ,
,  – эквивалентное сопротивление контуров намагничивания и ротора.
– эквивалентное сопротивление контуров намагничивания и ротора.
Индукционные магнитные преобразователи нашли широкое применение в связи с их достоинствами; возможностью получения независимости величины момента от положения ротора в пределах одного оборота, что недостижимо для преобразователей других типов; хорошей линейностью ФП.
Рис. 6 Функция преобразования МП
Основные недостатки индукционных преобразователей – невысокое значение выходного момента, особенно с немагнитным ротором, и трудность обеспечения достаточно малого «нулевого момента».
Так как моментные преобразователи работают в заторможенном режиме, основными причинами, вызывающими «нулевой момент», являются паразитные короткозамкнутые витки в магнитопроводе. Вследствие этого поток возбуждения получает дополнительный фазовый сдвиг, приводящий к образованию вращающегося магнитного поля, т.е. «нулевого момента»
Выполнение ротора с большим активным сопротивлением позволяет повысить электрическую симметрию преобразователя, следовательно, несколько уменьшает и «нулевой момент», но при этом уменьшается и его чувствительность. Для уменьшения «нулевого момента» необходима тщательная сборка магнитопровода.
В исполнительных асинхронных двигателях роторы также выполняются с повышенным активным сопротивлением. Это делается с целью устранения самохода двигателя, т.к. исполнительные двигатели должны быть управляемыми и при отсутствии входного сигнала (при включенной обмотке возбуждения) двигатель должен остановиться.
В точных моментных преобразователях для повышения температурной стабильности, чувствительности используется токопроводящее покрытие ротора металлом с малым коэффициентом сопротивления, например, манганином, но такое покрытие по сравнению с медным снижает чувствительность преобразователя. Иногда для той же цели применяют схемные методы.
Дата добавления: 2015-03-07; просмотров: 1568;