Асинхронные тахогенераторы. По конструктивному исполнению асинхронный тахогенератор подобен асинхронному двигателю с немагнитным полым ротором
По конструктивному исполнению асинхронный тахогенератор подобен асинхронному двигателю с немагнитным полым ротором. Он состоит из статора и неподвижного сердечника ротора, между которыми в воздушном зазоре вращается тонкостенный немагнитный полый цилиндр (рис.4).
На статоре генератора помещаются две однофазные обмотки, взаимно сдвинутые по его окружности на половину полюсного шага (на 90 электрических градусов). Одна из обмоток включается в сеть переменного тока напряжением UВ и называется обмоткой возбуждения – wВ, а другая с числом витков wГ – генераторной. Взаимная индукция между этими обмотками отсутствует вследствие взаимной перпендикулярности их осей, поэтому при неподвижном роторе – цилиндре в генераторной обмотке ЭДС отсутствует. При вращении ротора с угловой скоростью da/dt его образующие пересекают пульсирующее магнитное поле ФВ возбуждения и в них возникает ЭДС вращения. Эта ЭДС вызывает в роторе ток Jq, создающий по оси генераторной обмотки пульсирующее поперечное поле Фq . Поле Фq , пульсируя с частотой напряжения возбуждения – UВ , индуцирует в генераторной обмотке ЭДС, амплитуда которой пропорциональна скорости вращения цилиндра.
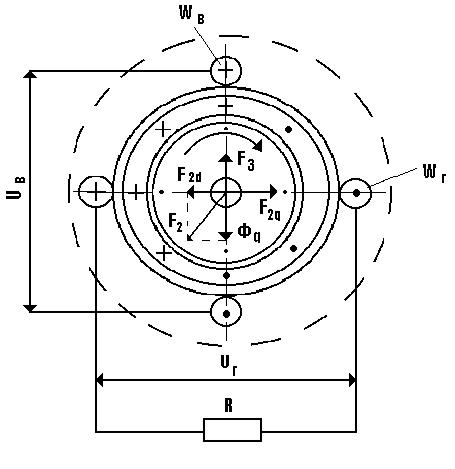
Рис. 4 Схема асинхронного тахогенератора
На рис.5 представлены кривые выходной характеристики  при различных значениях нагрузки Zn.
при различных значениях нагрузки Zn.
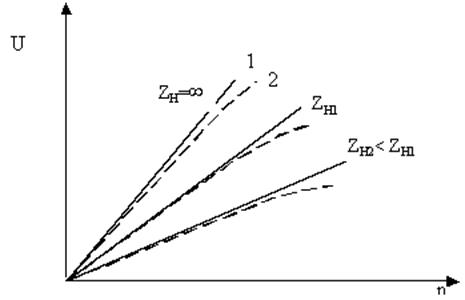
Рис. 5 Выходная характеристика асинхронного тахогенератора
В идеализированном тахогенераторе выходная характеристика линейная (кривая 1). В реальных тахогенераторах эта зависимость отклоняется от линейной (кривая 2), т.е. появляется амплитудная погрешность. Причинами отклонения выходной характеристики от линейной зависимости являются:
а) технологические неточности при изготовлении;
б) электромагнитная реакция ротора, изменяющая величину потоков ФВ и Фq при изменении режима работы тахогенератора (скорости вращения и нагрузки);
в) изменение сопротивления полого ротора при изменении скорости вращения;
г) изменение сопротивления обмоток и магнитного сопротивления машины по различным осям под влиянием температуры, насыщения и др.
Из-за технологических неточностей при изготовлении тахогенераторов (отклонения обмоток статора wВ и wГ от взаимно - перпендикулярного положения, неравномерность воздушного зазора и толщины полого ротора, неоднородность структуры магнитных материалов и т.д.) в генераторной обмотке при неподвижном роторе индуктируется некоторая остаточная ЭДС, называемая нулевым сигналом. Нулевой сигнал, обусловленный неточным взаимным расположением обмоток wВ и wГ , может быть уменьшен размещением обмоток на разных элементах магнитопровода, например wВ на внешнем статоре, wГ на внутреннем (сердечнике). Это даёт возможность поворотом сердечника установить минимальный нулевой сигнал.
Другие методы уменьшения нулевого сигнала основаны на компенсации остаточного ЭДС или остаточной намагничивающей силы.
Полностью устранить нулевой сигнал указанными методами не удаётся из-за неравномерности толщины полого ротора, т.к. эта неравномерность приводит к электрической асимметрии ротора и величина остаточной ЭДС будет зависеть от углового положения ротора.
При рассмотрении идеализированного тахогенератора предполагалось, что величина потока ФВ остаётся неизменной при всех режимах работы. В действительности этот поток изменяется при изменении нагрузки в генераторной обмотке. Асинхронный тахогенератор можно рассматривать как трансформатор с вращающейся короткозамкнутой вторичной обмоткой, в которой кроме трансформаторной ЭДС от пульсации поля возбуждения ФВ индуктируется ещё ЭДС вращения от пересечения этого поля образующими цилиндра. Тонкостенный цилиндр представляет собой равномерно распределённую обмотку и не имеет определённой фиксированной магнитной оси. Под действием поперечного потока ФВ в элементах полого ротора индуктируется ЭДС вращения e¢u и возникают токи i¢u, которые распределены относительно осей машины так же, как и токи, создаваемые трансформаторными ЭДС. При этом появляется добавочная продольная составляющая намагничивающей силы ротора F2d, изменяющая ток возбуждения J1 (рис. 6а).

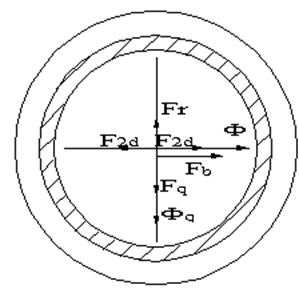
Рис. 6а Расположение магнитного потока тахогенератора
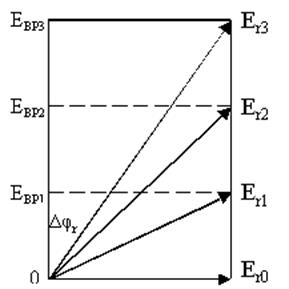
Рис. 6б Расположение выходного напряжения тахогенератора
В результате изменяется ЭДС возбуждения EВ, продольный поток – ФВ и ЭДС в генераторной обмотке:
 (2.2.6)
(2.2.6)
|
 ,
,  – соответственно активная и индуктивная составляющая сопротивления обмотки возбуждения;
– соответственно активная и индуктивная составляющая сопротивления обмотки возбуждения;
 (2.2.7)
(2.2.7)
где  – обмоточный коэффициент обмотки возбуждения. Т.к. поток Фq пропорционален скорости вращения ротора, то ЭДС e¢u, токи i¢u и н.с. F2d будут пропорциональны уже квадрату этой скорости. Следовательно, они будут не линейно уменьшать магнитный поток и ЭДС Eг при увеличении скорости вращения.
– обмоточный коэффициент обмотки возбуждения. Т.к. поток Фq пропорционален скорости вращения ротора, то ЭДС e¢u, токи i¢u и н.с. F2d будут пропорциональны уже квадрату этой скорости. Следовательно, они будут не линейно уменьшать магнитный поток и ЭДС Eг при увеличении скорости вращения.
При подключении к выходной обмотке нагрузки по ней протекает ток Jг, который создаёт некоторую н.с. Frq. Результирующая н.с. по поперечной оси Fq=F2q1+F1q, т.е. она будет отличаться от н.с. F2q1 при холостом ходе. Кроме того, выходное напряжение тахогенератора под нагрузкой будет меньше, чем при холостом ходе, за счёт падения напряжения в обмотках генератора.
 Уравнение выходной характеристики в комплексной форме имеет вид:
Уравнение выходной характеристики в комплексной форме имеет вид:
 , (2.2.8)
, (2.2.8)
где k – коэффициент пропорциональности;
n=n/n1 – относительная скорость вращения;
n1 – синхронная скорость;
A, B – комплексные коэффициенты, зависящие от параметров схемы тахогенератора.
Из (2.2.8) следует, что для уменьшения погрешности от нелинейности нужно уменьшить член Вn2 ,вызывающий отклонение от линейной зависимости. Для этого тахогенераторы выбирают с большой синхронной скоростью, частота питающей сети 400 ¸ 1000 Гц, а измеряемая скорость не должна превышать n = 0.2 ¸ 0.3.
|

(2.2.9)
где r2 – активное сопротивление ротора;
r1 – полное (приведённое) сопротивление обмоток статора.
Следовательно, уменьшение погрешности может быть достигнуто путём увеличения r2, ZH и уменьшения Z1. Для этой цели необходимо работать при ZH »¥, т.е. при режиме холостого хода, а полый ротор выполняют обычно из материалов с большим электрическим сопротивлением, чем в исполнительных двигателях. Кроме того, увеличивают сечение проводов обмоток статора.
В асинхронных тахогенераторах погрешность выходной характеристики является комплексной величиной, т.е. при изменении скорости вращения тахогенератора Ег представляет собой геометрическую сумму нулевого сигнала Ег0 и ЭДС вращения Евр, при этом фазовая погрешность Djr тем больше, чем меньше скорость вращения.
Существенное влияние на точность АТ оказывает изменение сопротивления машины при её нагреве во время работы. В основном оно вызывается нагревом ротора. Для устранения температурной погрешности в тахогенераторах большой мощности ротор выполняют из материалов с низким температурным коэффициентом сопротивления или применяют специальную температурную компенсацию.
Полная погрешность тахогенераторов при максимальной рабочей скорости обычно составляет 0.1¸ 2.5 %. В тахогенераторах, служащих для измерения скорости вращения и для выработки ускоряющих и замедляющих сигналов, основное значение имеет амплитудная погрешность; при использовании же их в качестве дифференцирующих звеньев они должны иметь минимальную как амплитудную (0.05 ¸ 0.3%), так и фазовую (не более 0.1°) погрешности.
В современных АТ крутизна выходной характеристики S = dUвых/dn составляет 1 ¸10 мВ/(об/мин).
Величина нулевого сигнала обычно не превышает 0.1% от максимального значения выходного напряжения и составляет 25 ¸ 100 мВ; переменная составляющая её DЕ0 = Е0max – Е0min, изменяющаяся при различных положениях ротора, не превышает 0.7 мВ. Максимальная рабочая скорость nmax достигает 8000 ¸ 10000 об/мин, а относительная скорость
Очень часто АТ, также как и тахогенераторы постоянного тока, конструктивно выполняются в одном корпусе с приводным двигателем, образуя тахометрический агрегат (АДТ, ДТ).
Дата добавления: 2015-03-07; просмотров: 2534;