Асинхронные тахогенераторы
В схемах автоматики асинхронные тахогенераторы выполняют такие же функции, как и тахогенераторы постоянного тока (см. § 4.4). Они также делятся на точные, предназначенные для работы в дифференцирующих и интегрирующих схемах, и менее точные, предназначенные для следящих систем в цепях обратной связи по скорости.
В отличие от тахогенераторов постоянного тока асинхронные тахогенераторы являются бесконтактными (не имеют скользящих контактов), а, следовательно, они более надежны.
По конструкции асинхронные тахогенераторы не отличаются от асинхронных исполнительных двигателей с полым немагнитным ротором (см. § 10.3). На их статоре также расположены две обмотки, сдвинутые в пространстве на 90 эл. град (рис. 3.50): одна из обмоток ОВ подключена к сети и называется обмоткой возбуждения; с другой обмотки ОГ, называемой выходной или генераторной, снимается выходное напряжение тахогенератора.
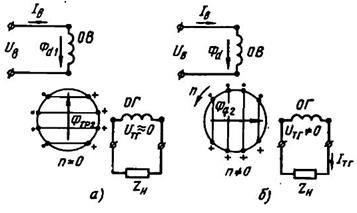
Рис. 3.50. Принцип действия асинхронного тахогенератора
Принцип действия асинхронного тахогенератора состоит в следующем. Переменный ток возбуждения создает пульсирующий поток  , который, пронизывая полый ротор, наводит в нем э. д. с. трансформации. Контуры токов ротора от э. д. с. трансформации располагаются в плоскостях, перпендикулярных потоку возбуждения (рис. 3.50, а). Они создают поток ротора
, который, пронизывая полый ротор, наводит в нем э. д. с. трансформации. Контуры токов ротора от э. д. с. трансформации располагаются в плоскостях, перпендикулярных потоку возбуждения (рис. 3.50, а). Они создают поток ротора  , который направлен навстречу потоку возбуждения и компенсируется возрастающим током обмотки возбуждения (см. § 6.4).
, который направлен навстречу потоку возбуждения и компенсируется возрастающим током обмотки возбуждения (см. § 6.4).
При вращении ротора его «волокна» пересекают поток возбуждения и в них, кроме э. д. с. трансформации, наводятся еще э. д. с. вращения (резания). Под действием э. д. с. вращения по ротору протекают токи, контуры которых при большом активном сопротивлении ротора практически совпадают с осью потока возбуждения (рис. 3.50, б). Эти токи создают магнитный поток ротора  , который направлен по поперечной оси тахогенератора. Поток сцепляется с витками генераторной обмотки ОГ и наводит в них э. д. с.
, который направлен по поперечной оси тахогенератора. Поток сцепляется с витками генераторной обмотки ОГ и наводит в них э. д. с.  – выходную э. д. с. тахогенератора. Так как поток изменяется с частотой сети, то и частота выходной э. д. с. равна частоте сети и не зависит от частоты вращения ротора.
– выходную э. д. с. тахогенератора. Так как поток изменяется с частотой сети, то и частота выходной э. д. с. равна частоте сети и не зависит от частоты вращения ротора.
Э. д. с. ротора, а, следовательно, поток и выходная э. д. с. пропорциональны частоте вращения ротора:  .
.
Выходное напряжение тахогенератора  меньше э. д. с.
меньше э. д. с.  на величину падения напряжения в генераторной обмотке с сопротивлением
на величину падения напряжения в генераторной обмотке с сопротивлением  :
:
Основными требованиями, предъявляемыми к выходной характеристике асинхронного тахогенератора  , являются:
, являются:
линейность  ;
;
постоянство фазы при изменении n;
наибольшая крутизна – большое  при малых
при малых  ;
;
симметрия – постоянство  при вращении ротора в различных направлениях с одинаковыми частотами вращения;
при вращении ротора в различных направлениях с одинаковыми частотами вращения;
стабильность – независимость выходной характеристики от температуры, условий эксплуатации, времени и т. п.
Особенно жесткие требования предъявляются к выходной характеристике тахогенераторов, работающих в счетно-решающих устройствах (в дифференцирующих и интегрирующих схемах). Теоретически выходное напряжение тахогенератора может быть исследовано путем анализа выражения выходной характеристики:
 , (3.86)
, (3.86)
где  – коэффициент трансформации, т. е. отношение эффективных чисел витков генераторной
– коэффициент трансформации, т. е. отношение эффективных чисел витков генераторной  и возбуждающей
и возбуждающей  обмоток (
обмоток (  ,
,  – обмоточные коэффициенты генераторной обмотки и обмотки возбуждения);
– обмоточные коэффициенты генераторной обмотки и обмотки возбуждения);  – напряжение возбуждения;
– напряжение возбуждения;  – относительная частота вращения – отношение действительной частоты вращения n к синхронной
– относительная частота вращения – отношение действительной частоты вращения n к синхронной  ;
;  и
и  – комплексные коэффициенты, зависящие от параметров тахогенератора – его активных и индуктивных сопротивлений.
– комплексные коэффициенты, зависящие от параметров тахогенератора – его активных и индуктивных сопротивлений.
Линейность выходной характеристики – амплитудная погрешность. Как видно из выражения (3.86), выходное напряжение  не является линейной функцией частоты вращения v. Нелинейность появляется за счет члена
не является линейной функцией частоты вращения v. Нелинейность появляется за счет члена  . Если бы он был равен нулю, то было бы пропорционально v и тахогенератор был бы идеальным.
. Если бы он был равен нулю, то было бы пропорционально v и тахогенератор был бы идеальным.
При проектировании тахогенераторов член стараются уменьшить. Последнее достигается за счет снижения как v, так и В.
Чтобы уменьшить относительную частоту вращения  , тахогенераторы проектируют на большую частоту
, тахогенераторы проектируют на большую частоту  с наименьшим числом пар полюсов р. Обычно
с наименьшим числом пар полюсов р. Обычно  . Тахогенераторы с р=1 стараются не проектировать, так как при этом трудно бороться с возникающей магнитной и электрической асимметрией.
. Тахогенераторы с р=1 стараются не проектировать, так как при этом трудно бороться с возникающей магнитной и электрической асимметрией.
Коэффициент можно записать как
 , (3.87)
, (3.87)
где Zн – сопротивление нагрузки тахогенератора; ZSB и rrB – полное сопротивление обмотки возбуждения и активное сопротивление ротора, приведенное к обмотке возбуждения.
Чтобы уменьшить , работают при больших сопротивлениях нагрузки  , а ротор тахогенератора (для увеличения
, а ротор тахогенератора (для увеличения  ) выполняют из материалов с большим удельным сопротивлением фосфористой или марганцовистой бронзы или из сплавов типа манганин, нейзильбер.
) выполняют из материалов с большим удельным сопротивлением фосфористой или марганцовистой бронзы или из сплавов типа манганин, нейзильбер.
К уменьшению коэффициента трансформации и сопротивления  обычно не прибегают, так как первое ведет к снижению крутизны выходной характеристики (так как
обычно не прибегают, так как первое ведет к снижению крутизны выходной характеристики (так как  ), а второе – к увеличению габаритов тахогенератора.
), а второе – к увеличению габаритов тахогенератора.
Отклонение реальной 1 выходной характеристики от идеальной 2 (прямолинейной) называется амплитудной погрешностью тахогенератора  (рис. 3.51). Амплитудная погрешность определяется как отношение (выраженное в процентах) величины отклонения реальной выходной характеристики от идеальной (
(рис. 3.51). Амплитудная погрешность определяется как отношение (выраженное в процентах) величины отклонения реальной выходной характеристики от идеальной (  ) к максимальной э. д. с. генераторной обмотки
) к максимальной э. д. с. генераторной обмотки  . При настройке схемы тахогенератор нужно откалибровать (установить наклон идеальной характеристики) таким образом, чтобы амплитудная погрешность была минимальной. На рис. 3.51, а и б приведены характеристики соответственно при неправильной и правильной калибровке.
. При настройке схемы тахогенератор нужно откалибровать (установить наклон идеальной характеристики) таким образом, чтобы амплитудная погрешность была минимальной. На рис. 3.51, а и б приведены характеристики соответственно при неправильной и правильной калибровке.
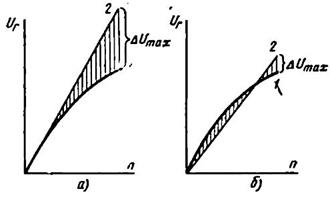
Рис. 3.51. Реальная и идеальная выходные характеристики асинхронного тахогенератора
Физически наличие амплитудной погрешности можно объяснить целым рядом факторов:
1) падением напряжения в генераторной обмотке  ;
;
2) уменьшением потока вследствие размагничивающего действия магнитного потока реакции генераторной обмотки  (рис. 3.52);
(рис. 3.52);
3) отклонением потока ротора  от поперечной оси (рис. 3.53, а) из-за изменения индуктивного сопротивления рассеяния ротора
от поперечной оси (рис. 3.53, а) из-за изменения индуктивного сопротивления рассеяния ротора  , (поток ротора направлен точно по поперечной оси только тогда, когда индуктивное сопротивление рассеяния ротора
, (поток ротора направлен точно по поперечной оси только тогда, когда индуктивное сопротивление рассеяния ротора  , рис. 3.53, б);
, рис. 3.53, б);
4) изменением тока возбуждения  , а, следовательно, и магнитного потока в результате действия дополнительной э. д. с., наведенной в обмотке возбуждения потоком ротора
, а, следовательно, и магнитного потока в результате действия дополнительной э. д. с., наведенной в обмотке возбуждения потоком ротора  ; этот поток создается токами ротора, возникающими в результате пересечения поперечными «волокнами» ротора магнитного потока (рис. 3.54).
; этот поток создается токами ротора, возникающими в результате пересечения поперечными «волокнами» ротора магнитного потока (рис. 3.54).
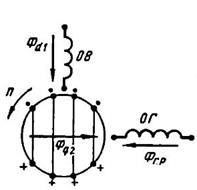
Рис. 3.52. К вопросу о размагничивающем действии генераторной обмотки
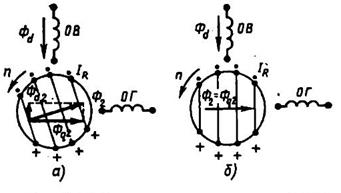
Рис. 3.53. К вопросу о направлении потока ротора в зависимости от э.д.с. вращения
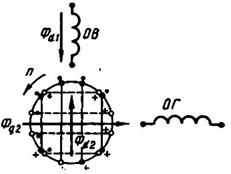
Рис. 3.54. К вопросу о продольном потоке ротора
Для получения минимальной амплитудной погрешности стараются работать при малых относительных частотах вращения v – уменьшают диапазон рабочих частот вращения до  в тахогенераторах высокой точности и до
в тахогенераторах высокой точности и до  в тахогенераторах следящих систем и тахогенераторах для измерения частоты вращения. В первых из них
в тахогенераторах следящих систем и тахогенераторах для измерения частоты вращения. В первых из них  , во-вторых
, во-вторых  . Амплитудная погрешность тахогенератора может быть значительно уменьшена в случае применения определенной по величине активно-емкостной нагрузки (компаундирование).
. Амплитудная погрешность тахогенератора может быть значительно уменьшена в случае применения определенной по величине активно-емкостной нагрузки (компаундирование).
Фазовая погрешность. Выходное напряжение асинхронного тахогенератора не совпадает по фазе с напряжением возбуждения и не остается постоянным по фазе при изменении частоты вращения. Отклонение выходного напряжения по фазе от исходного (соответствующего точке калибровки тахогенератора), измеренное в угловых градусах или минутах, называется фазовой погрешностью тахогенератора  . Фазовая погрешность в основном определяется индуктивными сопротивлениями ротора и обмоток статора. Величина ее, так же как и величина амплитудной погрешности, может быть значительно снижена за счет правильного выбора характера нагрузки. Фазовую погрешность можно устранить, применив некоторую активно-индуктивную нагрузку, однако, как следует из вышесказанного, при этом возрастет амплитудная погрешность.
. Фазовая погрешность в основном определяется индуктивными сопротивлениями ротора и обмоток статора. Величина ее, так же как и величина амплитудной погрешности, может быть значительно снижена за счет правильного выбора характера нагрузки. Фазовую погрешность можно устранить, применив некоторую активно-индуктивную нагрузку, однако, как следует из вышесказанного, при этом возрастет амплитудная погрешность.
Величина фазовой погрешности у современных тахогенераторов высокой точности составляет несколько минут, а у обычных тахогенераторов – несколько градусов.
Следует отметить, что как амплитудная, так и фазовая погрешности меняются с изменением частоты вращения (рис. 3.55).
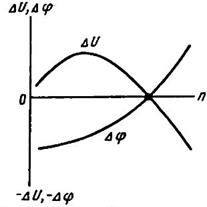
Рис. 3.55. Зависимость амплитудной и фазовой погрешностей от частоты вращения
Крутизна выходной характеристики. Чем больше крутизна выходной характеристики  , тем больше чувствительность тахогенератора и всей автоматической системы, в которой он работает.
, тем больше чувствительность тахогенератора и всей автоматической системы, в которой он работает.
Крутизна зависит от величины магнитного потока возбуждения , сопротивления ротора Z2, числа витков генераторной обмотки wГ. Чем больше поток обмотки возбуждения , тем больше э. д. с., ток ротора, поток , а, следовательно, и выходное напряжение UГ. Чем меньше Z2 и больше число витков генераторной обмотки wГ, тем больше ток ротора и выходное напряжение тахогенератора UТГ, а значит, и его крутизна kТГ.
Увеличение крутизны выходной характеристики тахогенератора почти всегда ведет к увеличению его амплитудной и фазовой погрешностей. Действительно, увеличение крутизны требует уменьшения сопротивления ротора Z2 (а оно в основном активное), в то же время снижение r2 ведет к уменьшению линейности выходной характеристики и к увеличению фазовой погрешности. То же самое можно сказать и о влиянии wГ. Поэтому при проектировании тахогенераторов всегда исходят из того, что от него требуется – либо большая крутизна kТГ , либо меньшие погрешности и .
Крутизна современных тахогенераторов весьма различна и определяется назначением тахогенератора. У точных тахогенераторов  , а у тахогенераторов следящих систем
, а у тахогенераторов следящих систем  .
.
Несимметрия выходной характеристики. В схемах автоматики очень важно, чтобы выходное напряжение UТГ тахогенератора по величине не зависело от направления вращения. При изменении направления вращения только фаза выходного напряжения должна меняться на обратную (на 180°).
Практически у всех тахогенераторов выходная характеристика несимметрична – напряжение при вращении ротора в различных направлениях имеет различную крутизну, особенно в начальной части выходной характеристики (при малых n).
Большое влияние на несимметрию оказывает нулевая (остаточная) э. д. с.  т. е. э. д. с., наводимая в генераторной обмотке при неподвижном роторе. Теоретически при n=0 в генераторной обмотке не должно находиться никаких э. д. с., так как обмотки
т. е. э. д. с., наводимая в генераторной обмотке при неподвижном роторе. Теоретически при n=0 в генераторной обмотке не должно находиться никаких э. д. с., так как обмотки  и
и  должны иметь пространственный сдвиг на 90 эл.град. Однако, сдвиг обмоток отличается от указанного значения. Кроме того, в тахогенераторах имеют место: несимметрия магнитной цепи (неравенство магнитных проводимостей в различных радиальных направлениях), неравномерность воздушного зазора, неодинаковая толщина стенок стакана ротора, наличие магнитных потоков рассеяния и емкостных связей между обмотками. В результате в генераторной обмотке тахогенератора даже при n=0 наводится некоторая
должны иметь пространственный сдвиг на 90 эл.град. Однако, сдвиг обмоток отличается от указанного значения. Кроме того, в тахогенераторах имеют место: несимметрия магнитной цепи (неравенство магнитных проводимостей в различных радиальных направлениях), неравномерность воздушного зазора, неодинаковая толщина стенок стакана ротора, наличие магнитных потоков рассеяния и емкостных связей между обмотками. В результате в генераторной обмотке тахогенератора даже при n=0 наводится некоторая  .
.
Величина остаточной э. д. с. изменяется по величине при изменении положения ротора. Остаточную э. д. с. можно разделить на переменную (  ) и постоянную (
) и постоянную (  ) составляющие. Постоянная составляющая обусловливается неточным смещением обмоток, магнитной несимметрией стали и воздушного зазора, наличием потоков рассеяния и емкостных связей. У большинства тахогенераторов она составляет
) составляющие. Постоянная составляющая обусловливается неточным смещением обмоток, магнитной несимметрией стали и воздушного зазора, наличием потоков рассеяния и емкостных связей. У большинства тахогенераторов она составляет  мВ. Переменная составляющая обусловливается в основном неодинаковой толщиной (электрической проводимостью) стенок стакана ротора и составляет
мВ. Переменная составляющая обусловливается в основном неодинаковой толщиной (электрической проводимостью) стенок стакана ротора и составляет  мВ.
мВ.
Для снижения постоянной составляющей часто обмотки возбуждения и генераторную размещают на разных статорах (рис. 3.56) – одну 4 на внутреннем статоре 3, другую 2 на внешнем статоре 1. При сборке тахогенератора внутренний статор поворачивают, находят положение, соответствующее минимальному значению нулевой э. д. с., и в этом положении закрепляют. Кроме того, листы пакетов стали статоров тщательно изолируют, собирают веером, а пакеты хорошо обрабатывают.
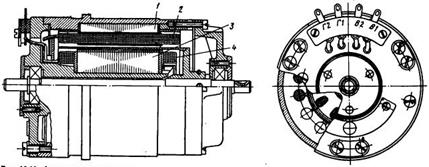
Рис. 3.56. Асинхронный тахогенератор с полым немагнитным ротором
Для уменьшения переменной составляющей тщательно обрабатывают (калибруют) ротор. В особо точных тахогенераторах применяют дополнительные компенсационные обмотки, включаемые по специальным схемам.
Выходная э. д. с. тахогенератора фактически представляет собой сумму основной генераторной э. д. с. и остаточной  :
:
 .
.
Так как при изменении направления вращения  остается постоянной, a меняет фазу на 180°, то, как видно из диаграммы
остается постоянной, a меняет фазу на 180°, то, как видно из диаграммы
(рис. 3.57), э. д. с.  меняется по величине
меняется по величине  . Следовательно, важнейшим способом снижения несимметрии выходной характеристики является уменьшение нулевой (остаточной) э. д. с.
. Следовательно, важнейшим способом снижения несимметрии выходной характеристики является уменьшение нулевой (остаточной) э. д. с.
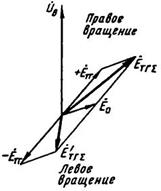
Рис. 3.57. Влияние остаточных э.д.с. на ассиметрию выходного напряжения асинхронного тахогенератора
Стабильность выходной характеристики. Очень важно, чтобы выходная характеристика тахогенератора была стабильной, т. е. не зависела от изменения температуры, нагрузки, условий эксплуатации, времени работы и т. п.
В реальных тахогенераторах при изменении температуры меняются активные сопротивления обмотки возбуждения, ротора, генераторной обмотки. В результате выходная характеристика несколько искажается.
Характеристика тахогенератора видоизменяется вследствие изменения насыщения, наличия непостоянного по величине остаточного магнетизма, изменения величины и характера нагрузки и т. п. Нестабильность выходной характеристики приводит к дополнительным погрешностям, которые называются в зависимости от фактора, их вызывающего: температурной, остаточного магнетизма, нагрузочной, частотной и т. п.
Методы борьбы с дополнительными погрешностями тахогенератора самые разнообразные. Однако большинство из них сводится к стабилизации нагрузки, частоты, входного напряжения и т. п.
Положительные качества рассматриваемого тахогенератора – бесконтактность, малая инерционность, высокая надежность, малый момент сопротивления.
Его недостатки – нелинейность выходной характеристики, фазовая погрешность и нулевое напряжение, малая выходная мощность при значительных габарите и весе.
Дата добавления: 2015-02-23; просмотров: 2782;