С полым ферромагнитным ротором
Наряду с двигателями, имеющими полые немагнитные и короткозамкнутые роторы (см. § 8.1), в качестве исполнительных, а также силовых двигателей применяются асинхронные двигатели с полыми ферромагнитными роторами.
Статоры таких двигателей ничем не отличаются от статоров двухфазных асинхронных машин. Роторы выполняются в виде полых ферромагнитных цилиндров, имеющих толщину  мм. Цилиндр ротора 1 укрепляется на валу двигателя либо с помощью двух торцевых металлических пробок 2 (рис. 3.48, а), либо с помощью одной пробки 2, запрессованной в центральную часть цилиндра (рис. 3.48, б).
мм. Цилиндр ротора 1 укрепляется на валу двигателя либо с помощью двух торцевых металлических пробок 2 (рис. 3.48, а), либо с помощью одной пробки 2, запрессованной в центральную часть цилиндра (рис. 3.48, б).
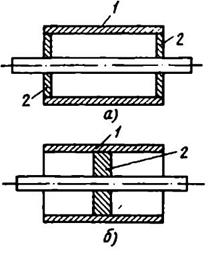
Рис. 3.48. Полые ферромагнитные роторы с двумя и одной пробками
Так как ротор ферромагнитный, то магнитный поток двигателя замыкается непосредственно по ротору (рис. 3.49). Таким образом, в отличие от двигателя с полым немагнитным ротором здесь нет необходимости во внутреннем статоре. Воздушный зазор между ротором и статором в этих двигателях небольшой (  мм), поэтому м.д.с. воздушного зазора невелика. В этом отношении двигатели с ферромагнитным ротором выгодно отличаются от двигателей с полым немагнитным ротором, однако суммарная м. д. с., а следовательно, и намагничивающий ток двигателя практически не отличаются от м. д. с. и намагничивающего тока двигателя с полым немагнитным ротором. Причиной этого является то, что магнитная проводимость полого ферромагнитного ротора вследствие малой толщины стенок, а также эффекта вытеснения потока весьма незначительна. Значения
мм), поэтому м.д.с. воздушного зазора невелика. В этом отношении двигатели с ферромагнитным ротором выгодно отличаются от двигателей с полым немагнитным ротором, однако суммарная м. д. с., а следовательно, и намагничивающий ток двигателя практически не отличаются от м. д. с. и намагничивающего тока двигателя с полым немагнитным ротором. Причиной этого является то, что магнитная проводимость полого ферромагнитного ротора вследствие малой толщины стенок, а также эффекта вытеснения потока весьма незначительна. Значения  двигателей не превосходят
двигателей не превосходят  .
.
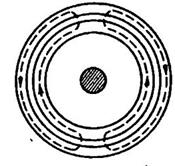
Рис. 3.49. Пути потока в двигателе с полым ферромагнитным ротором
Вследствие большого активного сопротивления ротора, что обусловлено большим удельным сопротивлением стали и эффектом вытеснения тока, критическое скольжение двигателей с полым ферромагнитным ротором значительно больше единицы. Этим объясняется тот факт, что рассматриваемые двигатели не имеют самохода и устойчиво работают во всем диапазоне частот вращения. По этой же причине механические и регулировочные характеристики двигателей с полым ферромагнитным ротором весьма близки к линейным. Они более линейны, чем характеристики двигателей с полым немагнитным и короткозамкнутым роторами. Характеристики двигателя становятся более прямолинейными с увеличением частоты питающей сети.
Как следствие чрезмерно большого активного сопротивления ротора у двигателей, рассчитанных на повышенную частоту, наблюдается некоторое уменьшение (по сравнению с двигателями, имеющими полый немагнитный ротор) вращающего момента, мощности на валу и увеличение потерь в роторе. Последнее приводит к снижению к. п. д. двигателя.
Для устранения указанных недостатков у некоторых двигателей производят омеднение ротора: гальваническим путем покрывают цилиндрическую поверхность ротора слоем меди толщиной  мм, а торцевые поверхности – слоем меди до 1 мм. Омеднение ротора способствует уменьшению его активного сопротивления, а следовательно, увеличению момента и мощности двигателя. Причем омеднение цилиндрической поверхности менее эффективно, так как оно одновременно с увеличением момента и мощности на валу двигателя вызывает повышение потерь в роторе и обмотке статора от возрастающего (вследствие увеличения немагнитного промежутка между статором и ротором) намагничивающего тока.
мм, а торцевые поверхности – слоем меди до 1 мм. Омеднение ротора способствует уменьшению его активного сопротивления, а следовательно, увеличению момента и мощности двигателя. Причем омеднение цилиндрической поверхности менее эффективно, так как оно одновременно с увеличением момента и мощности на валу двигателя вызывает повышение потерь в роторе и обмотке статора от возрастающего (вследствие увеличения немагнитного промежутка между статором и ротором) намагничивающего тока.
В схемах автоматики двигатель с полым ферромагнитным ротором не получил широкого распространения, поскольку его ротор имеет большой момент инерции. Электромеханическая постоянная времени этого двигателя составляет  с.
с.
Существенный недостаток двигателя с полым ферромагнитным ротором – его ротор при неравномерном воздушном зазоре (чего практически нельзя избежать в процессе производства) испытывает силы притяжения к статору. Это увеличивает момент трения в подшипниках, а у некоторых двигателей приводит «залипанию» ротора.
Дата добавления: 2015-02-23; просмотров: 1480;