Порядок выполнения лабораторной работы
1. Изучить принцип действия и конструкции исследуемых преобразователей, ознакомиться с лабораторной установкой, порядком ее выполнения. Перед началом работы заготовить таблицы.
2. Исследование магнитоэлектрического преобразователя.
Определить номинальную функцию преобразования (НФП)
– уравновесить преобразователь;
– определить момент для 6–8 точек для одной полярности и столько же для другой.
3 Исследование индукционного преобразователя.
3.1 Определение НФП:
– установить номинальный режим возбуждения; совместить ручку 8 ротора с нулевым делением шкалы Д; определить моменты для 6–8 точек при фазе +900 и столько же при фазе – 900.
3.2 Определение реальных ФП:
– реальные ФП определяются согласно задания, так же как и НФП, но при этом устанавливаются соответствующие режимы возбуждения (  ,
,  ,
,  ).
).
4. Выключить лабораторную установку.
5. Оформить отчет и ответить на контрольные вопросы. Отчет оформить согласно общим требованиям. В отчете привести все графики экспериментально полученных зависимостей.
ИССЛЕДОВАНИЕ ТАХОГЕНЕРАТОРОВ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКА
Общие сведения о тахогенераторах
Тахогенераторы предназначены для измерения угловых скоростей вращения и конструктивно представляют собой генераторы постоянного или переменного тока. В отличие от обычных генераторов у тахогенераторов выходное напряжение  (В) должно быть пропорциональным скорости вращения ротора – (об/мин). Эта зависимость называется скоростной характеристикой.
(В) должно быть пропорциональным скорости вращения ротора – (об/мин). Эта зависимость называется скоростной характеристикой.
В зависимости от выполняемой функции в тахогенераторах допускаются различные погрешности от нелинейности и стабильности характеристики.
Наименьшую нелинейность характеристики (0.05 ¸ 0.1 %) должны иметь тахогенераторы – элементы счетно-решающих устройств, которые выполняют операции дифференцирования и интегрирования. Для дифференцирования какой-либо функции необходимо поворачивать ротор тахогенератора на углы, пропорциональные величине этой функции, тогда выходное напряжение будет пропорционально производной от этой функции.
Передаточная функция тахогенератора в этом случае имеет вид реального дифференцирующего звена:
 (2.2.1)
(2.2.1)
где К – крутизна ЭДС тахогенератора в мВ/(об/мин);
Т – постоянная времени, определяемая в основном скоростью протекания электромагнитных процессов в машине, т.е. активными и реактивными сопротивлениями выходной обмотки и нагрузкой (электромеханической постоянной времени, обусловленной инерцией полого ротора тахогенератора, обычно пренебрегают).
Для интегрирования функции по времени надо преобразовать её в электрическое напряжение и вращать ротор так, чтобы ЭДС его генераторной обмотки в любой момент времени компенсировала это напряжение. Тогда угол поворота ротора будет пропорционален величине интеграла по времени от данной функции.
4.2.2 Тахогенераторы постоянного тока
Тахогенераторы постоянного тока представляют собой коллекторный генератор постоянного тока. Выполняются с независимым возбуждением (рис. 1а) или с возбуждением постоянным магнитом (рис. 1б).
При неизменном токе возбуждения JВ, т.е. при неизменном потоке Ф, ЭДС тахогенератора пропорциональна скорости вращения:
(2.2.2)
где Ce – постоянная тахогенератора, определяемая конструкцией;
n – скорость вращения в об/мин.
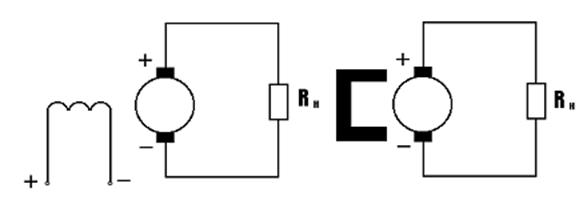
а) б)
Рис. 1 Тахогенераторы постоянного тока: а – независимое возбуждение, б – возбуждение постоянным магнитом
При нагружении тахогенератора сопротивлением Rн его выходное напряжение
 (2.2.3)
(2.2.3)
где R0 – сопротивление якорной обмотки, включая и сопротивление щёточного контакта.
Из уравнений (2.2.2), (2.2.3) находим уравнение выходной характеристики тахогенератора:
 , (2.2.4)
, (2.2.4)
где выражение
 (2.2.5)
(2.2.5)
крутизна выходного напряжения.
Часто под крутизной выходного напряжения принимается число вольт приходящееся на 1000 об/мин. В малых тахогенераторах специального назначения эта величина составляет 3 ¸ 5 В, а в тахогенераторах общего применения – 50 ¸ 100 В и более. Диапазон измеряемых скоростей вращения тахогенератора постоянного тока составляет 0 ¸ 10000 об/мин.
В идеализированном случае (Ф – const,  и
и  – const) выходные характеристики будут линейными. На рис.2 изображены сплошными линиями выходные характеристики для различных сопротивлений нагрузки. Угол наклона уменьшается при уменьшении сопротивления нагрузки.
– const) выходные характеристики будут линейными. На рис.2 изображены сплошными линиями выходные характеристики для различных сопротивлений нагрузки. Угол наклона уменьшается при уменьшении сопротивления нагрузки.
Практически выходная характеристика отклоняется от линейного закона в результате размагничивающего действия реакции якоря, наличия нелинейного сопротивления в переходном контакте между коллектором и щётками и изменения тока возбуждения при её нагреве.
Для уменьшения влияния размагничивающего действия реакции якоря желательно иметь в цепи нагрузки большое сопротивление и работать при небольших скоростях вращения.
Нелинейный характер сопротивления щёточного контакта также создаёт погрешность, т.к. падение напряжения под парой щёток (2DUЩ) можно приблизительно считать постоянным, не зависящим от тока нагрузки.
Поэтому в области малых скоростей тахогенератор становится нечувствительным к изменению скорости вращения (рис.3).
Для уменьшения погрешности, создаваемой 2DUЩ, в тахогенераторах применяют металлографические щётки, у которых величина 2DUЩ очень мала. В прецизионных тахогенераторах, предназначенных для счётно-решающих устройств, щётки изготавливают с серебряными и золотыми напайками, поэтому погрешностью от 2DUЩ можно пренебречь.
Рис. 2 Выходные характеристики тахогенератора
Рис. 3 Нулевой сигнал тахогенератора
Нагревание обмоток возбуждения тахогенератора приводит к уменьшению потока возбуждения, следовательно, к уменьшению выходного напряжения. Для стабилизации крутизны применяют при независимом возбуждении сильно насыщенную магнитную систему. В тахогенераторах с возбуждением постоянными магнитами изменения температуры окружающей среды оказывают меньшее влияние на величину магнитного поля магнитов.
Большим достоинством тахогенераторов постоянного тока является отсутствие фазовой погрешности. К недостаткам их относятся: сравнительно большие вес и стоимость, нестабильность выходной характеристики из-за наличия скользящего контакта, пульсация выходного напряжения и радиопомехи.
В общем случае различают скоростные, якорные, зубцовые и коллекторные пульсации выходного напряжения. Наименьшие пульсации у малогабаритных тахогенераторов с полым бескаркасным якорем, которые имеют меньшую механическую инерционность и улучшенные условия коммутации благодаря малому значению индуктивности обмотки якоря.
Дата добавления: 2015-03-07; просмотров: 1210;