АСИММЕТРИЯ МОЗГА И ЗНАКОВЫХ СИСТЕМ 1 страница
Аналитическая обработка экономической информации очень трудоемка сама по себе и требует большого объема разнообразных вычислений. С переходом к рыночным отношениям потребность в аналитической информации значительно увеличивается. Это связано прежде всего с потребностью разработки и обоснования перспективных бизнес-планов предприятий, комплексной оценки эффективности краткосрочных и долгосрочных управленческих решений. В связи с этим автоматизация аналитических расчетов стала объективной необходимостью.
Вычислительные средства, которые имеют сейчас предприятия и организации, позволяют целиком автоматизировать обработку всех экономических данных, в том числе и по анализу хозяйственной деятельности. Роль автоматизации аналитических расчетов заключается в следующем.
Во-первых, повышается продуктивность работы экономистов-аналитиков. Во-вторых, более глубоко и всесторонне исследуются экономические явления и процессы, более полно изучаются факторы и выявляются резервы повышения эффективности производства. В-третьих, повышаются оперативность и качество анализа, его общий уровень и действенность.
Автоматизация аналитических расчетов и сам анализ хозяйственной деятельности поднялись на более высокий уровень с применением ПЭВМ, для которых характерна высокая производительность, надежность и простота эксплуатации, наличие развитого программного обеспечения, диалогового режима работы, низкая стоимость и др. На их базе создаются АРМ бухгалтера, экономиста, финансиста, аналитика и т.д. ПЭВМ, соединенные в единую вычислительную сеть, позволяют перейти к комплексной автоматизации АХД.
Автоматизированное рабочее место экономиста-аналитика - это рабочее место, оснащенное персональной ЭВМ, которая на основе использования программного, методического и информационного обеспечения позволяет автоматизировать аналитические расчеты.
Необходимым условием создания АРМ аналитика является наличие технической базы (персональных ЭВМ), базы данных о хозяйственной деятельности предприятия, базы знаний (методов и методик анализа) и программных средств, позволяющих автоматизировать решение аналитических задач.
Создание АРМ аналитика требует решения многих организационных вопросов, связанных с методическим, техническим, программным и информационным обеспечением.
АСИММЕТРИЯ МОЗГА И ЗНАКОВЫХ СИСТЕМ
Цель этой книги — познакомить читателя с новыми кибернетическими гипотезами, идеями и методами, которые представляют интерес для наук и о человеке и о человеческой культуре.
В первой главе предлагается модель системы двух полушарий мозга, основанная на сопоставлении с комплексом двух вычислительных машин. Такие аналогии между организмом человека и созданными им техническими устройствами постоянно предлагаются в науке нового времени. Характер аналогий каждый раз определяется уровнем развития техники. Поэтому еще с XVII века для объяснения работы мозга (как и других физиологических процессов) выдвигаются преимущественно аналогии с механическими устройствами. Лишь сравнительно недавно они сменились сопоставлениями с электрическими системами.
На первом этапе становления кибернетики определяющей идеей было сравнение принципов работы мозга и электронной вычислительной машины. Логические схемы, реализуемые в вычислительной машине, служили моделями и для описания строения нервных сетей. Аналогия казалась особенно наглядной при сравнении отдельного элемента таких сетей — нейрона — с элементарными составными частями вычислительной машины. На этом этапе при кибернетическом исследовании мозга главным было его уподобление одной электронной машине. Подчеркивалась прежде всего универсальность мозгового вещества. Все части мозга рассматривались как построенные не только по единой схеме, но и из однотипных элементов, спо-
собных к выполнению одинаковых операций. Организация мозга в целом гораздо меньше занимала ученых.
В построении новейших роботов особую роль играют комплексы из двух вычислительных машин. Соотношение между частями таких комплексов оказывается сходным в определенном смысле с тем разделением функций между полушариями мозга, которое выявлено в физиологических и психологически? исследованиях последнего времени. Поэтому становятся воз можными достаточно обоснованные аналогии между мозгом и машиной не по отношению к простейшим элементам систем (например, нейронам), а применительно ко всей системе в целом и ее организации. Такое сравнение интересно тем, что оно может пролить свет на роль разных полушарий мозга в таких важнейших формах человеческой деятельности, как язык, мате матика, музыка. Одно из полушарий мозга, управляющее звуковой речью, по своему происхождению оказывается боле( молодым, чем полушарие, связанное с передачей информации посредством зрительных и пространственных образов. Время появления звукового языка, развития особых функций соответствующего полушария (обычно левого) и управляемой этим же полушарием основной руки (обычно правой) определяет важнейший рубеж в эволюции человека.
Во всех ранних человеческих обществах различие правой и левой руки входило в систему основных двоичных противоположностей, определявших строение обрядов и мифов. Поэтому оказывается естественным переход от кибернетической модели соотношения между правым и левым полушариями мозга, предлагаемой в первой главе книги, к исследованию двоичных кодов в человеческой культуре и языке, которому посвящена вторая глава. Двоичные коды долго сохраняются и в позднейших культурных традициях.
Достаточно напомнить, что в своих истоках современная математика восходит к пифагорейцам, по учению которых двоичная противоположность чета и нечета определяла всю природу мира. Недавние физические открытия, касающиеся симметрии элементарных частиц, позволяют увидеть глубину интуиции, скрытую в ранних научных прозрениях. Сходное с древнегреческим пифагорейским учение о чете и нечете было развито в древней теории искусства Дальнего Востока (Китая и Японии) и возрождено в трудах такого крупнейшего художника и искусствоведа нашего века, как С. М. Эйзенштейн. Двоичное противопоставление чета и нечета сохраняет значимость и для современной науки. Поэтому оно и выбрано как заглавие книги.
В первой главе рассматривается комплекс, состоящий из
двух машин или двух полушарии мозга одного человека, а в третьей (последней) главе изучается простейший коллектив, в который входят двое — человек и его собеседник. Собеседником человека может быть или другой человек, или вычислительная машина. Одну из основных трудностей при решении задачи общения между человеком и машиной на обычном языке представляет понимание слов «я» и «ты», которыми друг друга называют собеседники. Исследование двоичного противопоставления «я» и «ты» ведет к обсуждению проблемы диалога. Она принадлежит к числу самых основных для науки XX века. От диалога человека с машиной изложение в книге переходит к диалогу между двумя людьми, а далее — между двумя цивилизациями, одна из которых может быть внеземной. Всякого, кто следит за развитием областей знания, занимающихся исследованием языка в связи со строением мозга, не покидает чувство, что он присутствует при таких сдвигах в науке, от которых дух захватывает. Мне хотелось бы упомянуть несколько звеньев в моем собственном вхождении в науку, которые и определили это постоянно растущее чувство удивления перед ее возможностями. Такими начальными рубежами были: Семинар по некоторым применениям математических методов исследования в языкознании, который вел покойный П. С. Кузнецов вместе с В. А. Успенским и со мной в Московском университете в 1956—1958 гг.; многократные встречи с Р. О. Якобсоном в 1956—1967 гг., во время которых дискутировались предложенные им модели двоичных противоположностей в языке и других системах знаков; частые письменные и устные обсуждения в 1957—1962 гг. с А Н. Колмогоровым многих вопросов кибернетики, о которых идет речь в книге; разборы в 1959—1961 п. поражений головного мозга, вызывающих расстройство речи (афазию), в лаборатории, которой руководил недавно скончавшийся А.Р. Лурия в Институте нейрохирургии, работа над вопросами физиологии речи в 1962 г. в лаборатории Л. А. Чистович в ленинградском Институте физиологии; многолетние совместные занятия с В. Н. Топоровым структурой мифологических, ритуальных и других знаковых систем.
Мне хотелось бы помянуть добрым словом покойного своего друга М. Л. Цетлина, в котором поражало сочетание бесстрашной глубины научного проникновения с конкретностью инженерной реализации кибернетических идей, и незабвенного И- А. Соколянского, чьим замечательным работам по языку слепоглухонемых посвящен особый раздел книги.
Без этих начальных импульсов книга не была бы написана, хотя ни один из названных и неназванных моих коллег не мо-
жет считаться ответственным за те из предлагаемых или излагаемых гипотез, которые могут оказаться спорными.
Первоначальный текст книги, законченный в октябре 1976 г., был прочитан И. Б. Гутчиным и И. М. Ягломом, сделавшими многочисленные замечания. Ю. И. Манин познакомил меня в это же время с рукописью своей работы о двойственности, совпадение с отдельными положениями которой было для меня приятной неожиданностью. При подготовке окончательного текста были полезны обсуждения математических моделей морфогенеза с их создателем Р. Томом в конце декабря 1976 г.— январе 1977 г. Благодаря любезности Л. Я- Балонова и
B. Л. Деглина автор получил возможность включить в книгу некоторые предварительные результаты производимых совместно с ними разборов семантических ассоциаций у больных при левосторонних и правосторонних электрошоках.
Книга не могла бы быть написана без постоянной помощи
C. Л. Ивановой.
Январь 1977 г.
ПРАВОЕ — ЛЕВОЕ
Если мы можем охватить взглядом объект во всех его деталях, правильно понять и мысленно его воспроизвести, то мы имеем право сказать, что он нам принадлежит, что мы приобретаем некое господство над ним И так частное всегда ведет нас к общему, общее — к частному Оба взаимодействуют при любом рассмотрении, при любом изложении.
Здесь следует предпослать некоторые общие положения Двойственность явления как противоположность
Мы и предметы, Идеальное и реальное,
Свет и тьма, Чувствительность и рассудок,
Тело и душа,
Две души, Фантазия и разум,
Дух и материя, Бытие и стремление,
Бог и мир, Две половины тела,
Мысль и протяженность, Правое и левое
И. В. Гете. Полярность
МОЗГ КАК СИСТЕМА ИЗ ДВУХ МАШИН
При решении значительного числа наиболее сложных задач, возникающих перед вычислительной техникой, в последние годы все чаще становится необходимым создание целых комплексов вычислительных машин. В частности, во многих случаях оказалось практически наиболее разумным создание комплексов из двух машин, работающих как единая система.
Для оптимального зрительного вывода информации из вычислительной машины на экран были разработаны подобные системы, представляющие собой двухмашинный комплекс. Потребность в наличии именно двух машин была обусловлена тем, что системы управления должны одновременно решать две существенно различные задачи: обработка и подготовка к выводу всей информации и реализация изображения на экране [3].
В двухмашинном комплексе (типа разработанного в Инсти-
Мы и предметы,
Свет и тьма,
Тело и душа,
Две души,
Дух и материя,
Бог и мир,
Мысль и протяженность,
Идеальное и реальное, Чувствительность и рассудок,
Фантазия и разум, Бытие и стремление, Две половины тела, Правое и левое
И. В. Гете. Полярность
туте прикладной математики АН СССР) каждая из двух ма-| шин решает свою собственную задачу — более общую (планирование) и конкретную, связанную с манипуляциями в реальном пространстве — времени. Это характерно и для новейших! роботехнических систем.
Хотя название «робот» было изобретено чешским писателем Чапеком более полувека назад (в пьесе «Р.У.Р», описывающей j роботов — искусственных слуг человека), их широкое применение начинается только в последние годы. Роботы используются прежде всего для работ опасных, вредных или малодоступных для человека, например в морских глубинах, куда опускают гидравлические манипуляторы (в частности, построенный в Институте океанологии АН СССР), или в космосе, где за .автоматической станцией «Луноход-1» последовали робототехнические устройства для изучения разных планет. Автоматизация производства в таких индустриально развитых странах, ощущающих нехватку рабочей силы, как Япония, привела в последнее десятилетие к быстрому росту числа промышленных роботов: в мире их насчитывается уже более чем десять тысяч. Конструирование роботов более совершенных типов составляет сейчас практически едва ли не самую важную сторону работ по так называемому «искусственному интеллекту».
Технические достижения в области построения роботов в большой мере определяются знаниями о соответствующих физиологических системах у человека. Так, успешное построение шагающих роботов (в том числе человекоподобных — «внешних скелетов» — протезов, помогающих калекам передвигаться несмотря на неподвижность их собственных ног) и у нас [4], и за границей [5] оказалось возможным, в частности, благодаря приложению идей замечательного физиолога Николая Александровича Бернштейна (1896—1966)—одного из предвестников кибернетики. Еще в 1935 г. Н. А. Бернштейн обосновал мысль о многоуровневом иерархическом построении движений, которая и была воплощена в системах шагающих и некоторых других [6] роботов.
Динамические системы с таким большим числом степеней свободы, как человеческий организм (использующий около 800 мышц для различных движений), не могут управляться из одного-единственного центра. Существует целая иерархия соподчиненных друг другу центров разных уровней, каждый из которых в известной мере независим — в пределах, которые устанавливаются центром более высокого уровня. Эта точка зрения, намеченная Н. А. Бернштейном и развитая в кибернетических исследованиях И. М. Гельфанда и М. Л. Цетлина, привела двух последних ученых к выводу, согласно которому
«сложная многоуровневая система управления рассматривается как совокупность подсистем, обладающих относительной автономией» [7. с. 198],
Организм взаимодействует с внешней средой. Информация, из нее получаемая, также должна постоянно учитываться при построении и корректировке движений. Поэтому одной из важнейших проблем, вставших перед кибернетической физиологией и современной робототехникой, является выяснение того, как связанные друг с другом системы управления взаимодействуют с внешней средой.
Роботы должны манипулировать с реальными объектами. Поэтому управление аппаратурой робота должно производиться в реальном масштабе времени. Для этого требуются такие специфические устройства, которые могли бы производить текущее преобразование информации и частое прерывание манипуляций робота. Выполнение этих задач нецелесообразно соединять с процессом планирования и построения движений робота. Поэтому, как это и делается в двухмашинных комплексах (в СССР осуществленных, в частности, на основе соединения машин БЭСМ-6 и М-6000), решение первой задачи (управление в режиме реального времени) выделяется: его осуществляет отдельная вычислительная машина [152, с. 289].
Примером двухмашинного комплекса этого типа может быть робот Эдинбургского университета Марк 1,5, обладающий «глазом» — телевизионной камерой и «рукой» (роботы такого типа носят название «система глаз—рука») (рис. 1). И «глаз», и «рука» робота присоединены к небольшой вычислительной машине (16-разрядной ЭВМ Хониуэлл-316), которая в известной мере независима от связанной с ней большой вычислительной машины (ICL-4130), работающей в режиме разделения времени.
Машины связаны между собой двумя каналами связи, по которым данные могут передаваться в двух противоположных направлениях: машины могут спрашивать друг друга и отвечать друг другу. Малая вычислительная машина управляет «рукой» робота и совершает грубую обработку изображений, полученных от «глаза», тогда как большая вычислительная машина осуществляет общее -планирование всей работы робота и детально обрабатывает всю зрительную информацию, передаваемую ей малой машиной [8].
Аналогично устроена и система «глаз — рука», разрабатываемая и совершенствуемая на протяжении ряда лет в Стен-фордском университете (США). На этапе, отраженном в публикациях 1971 г., в состав двухмашинного комплекса входила большая вычислительная машина (РДР-10), которая строила
планы движения руки и обрабатывала информацию, получен ную роботом с помощью телевизионной камеры, и малая вычислительная машина (PDP-6 с оперативной памятью 128 килослов), обслуживающая двигатели телевизионной камеры управляющие устройства руки и другие аппаратные средства [9].
В более новом варианте Стенфордского робота, предназначенного для автоматизации процесса сборки заданного объек-
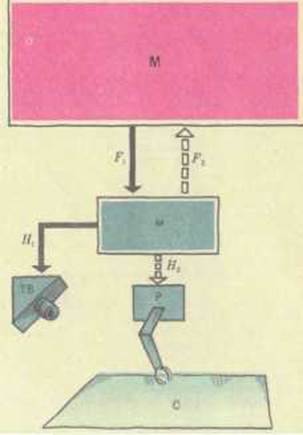
Рис 1. Схема робототехнический системы «глаз» — «рука» типа робота Эдинбургского университета Марк 1,5:
Р —рука; ТВ — «глаз», С — «среда», в которой работает робот; м — малая вычислительная машина; М — большая вычислительная машина, с разделением времени; Fb F2 и Hi H2 — каналы связи между вычислительными машинами и манипуляторами
та из деталей, двухмашинный комплекс, управляющий двуруким роботом, состоит из большой вычислительной машины (PDP-10) и малой вычислительной машины (миникомпьютера PDP-11/45), обеспечивающей работу нескольких автоматических устройств (манипуляторов, в частности искусственных «рук») в режиме реального времени [10].
Создатели Стенфордской системы объясняют этот принцип организации управления тем, что вычисление траектории «рук» двурукого робота требует длительного времени, но не критично по времени в отличие от обслуживания манипуляторов Как и все сложные живые организмы, робот, работающий во внешней среде, испытывает цейтнот
Нехватка времени для принятия решений у системы с большим числом степеней свободы ведет к необходимости выбора из двух возможностей- можно либо принять на\дачу первое попавшееся решение (этим, между прочим, объясняется с кибернетической точки зрения роль гаданий для принятия важнейших решений в таких древних коллективах, как римское общество), либо разработать специальное устройство («исполнительный орган») для быстрого принятия необходимых решений на основе переработки текущей экспресс-информации Такое разделение власти «исполнительной» — программ, управляющих манипуляторами в режиме реального времени,— и «законодательной» — общих планов работы робота — и проводится в новейших системах «глаз—рука».
Выделение особого «исполнительного» управляющего устройства, работающего в реальном пространстве — времени, представляет собой значительно более общий принцип, чем наличие специализированных систем управления для отдельных манипуляторов («рук») или воспринимающих органов («глаз») робота. В общих схемах роботов, основанных на аналогиях с мозгом позвоночных, уделялось достаточно внимания необходимости таких специализированных систем управления, как, например, решающие устройства разных уровней для обработки правого и левого изображений, получаемых бинокулярной телевизионной камерой [11, с. 116, фиг 1].
Наличие подобных специализированных устройств, осуществляющих предварительную обработку информации из внешней среды и управляющих манипуляторами, признается характерной чертой всех разрабатываемых в настоящее время «интеллектуальных роботов» [12, с. 160, фиг. 7.1]. Но сопоставление принципов организации этих роботов и центральной нервной системы человека требует рассмотрения двух важнейших проблем. Во-первых, следует выяснить, как соотнесено в них деление на специализированные и общую системы управления
с делением на «исполнительное» управление в реальном пространстве — времени и планирование. Во-вторых, необходимо установить, как соединяются вместе разные специализированные устройства.
Рассмотрим принципиальную схему такого робота, который снабжен двумя телевизионными камерами (как, например, эдинбургский Марк 1,5) и двумя руками (как стенфордская система «глаз — рука»). Управление роботом, который должен манипулировать объектами с помощью двух «рук», в простейших случаях (в разрабатываемых роботах для автоматической сборки) осуществляется последовательно. Вычислительная машина поочередно управляет каждой из двух «рук», причем, закончив операцию управления одной «рукой», система дает сигнал внутреннего прерывания.
Это временное решение, идущее по традиционному пути последовательных операций, вероятно, сменится в недалеком будущем построением параллельно работающих вычислительных систем. Работа каждой из двух рук может управляться одновременно функционально разнородными, но неразделимыми вычислительными системами (предполагается, что именно такие системы и станут основными в четвертом поколении вычислительных машин).
Ограничение на число телевизионных камер — «глаз» и манипуляторов— «рук» накладывается, по-видимому, не столько соображениями человекоподобности, существенными только для определенного класса роботов (типа шагающих «внешних скелетов» — медицинских протезов, приспособленных к особенностям человеческого тела), сколько другими причинами. Прежде всего, в структуре новейших роботов, как и живых организмов, моделями которых они являются, сказываются простые принципы симметрии, во многом определившие строение растений и животных в ходе эволюции.
Согласно формулировке акад. М. С. Гилярова «все активно передвигающиеся животные имеют наружную двустороннюю симметрию, как билатерально симметричны и все наши средства транспорта (лодка, самолет, автомобиль и т. д.)» [13, с. 70]. И двусторонняя (билатеральная или зеркальная) симметрия тел животных, и сосредоточение пространственного анализа в головном мозге, что ведет в дальнейшем к разобщению переднего мозга на два парных полушария [14], выводятся из основных характеристик поведения животных и внешней среды.
В зеркальной симметрии животных и построенных' человеком передвигающихся технических устройств можно видеть проявление принципа сохранения симметрии, впервые выдви-

ннутого Кюри: симметрия физического тела, находящегося в некотором пространстве, определяется симметрией этого пространства [15]. Группа симметрии двух объектов, составляющих единое целое, является общей высшей подгруппой групп симметрии этих объектов [16, с. 14].
Соображениями симметрии может быть мотивирована четность числа органов животных и манипуляторов активных передвигающихся роботов (в отличие от «одноруких» неподвижных роботов первого поколения). Но само число органов и манипуляторов этим не задается; теоретически роботы могут быть многорукими, как древнеиндийские или древнемексиканские боги, и многоглазыми, как мифологические чудища античности или древнего Китая. На примере уже частично осуществленных роботов — «многоножек» (рис. 2) можно видеть, как развитие роботов в известной мере параллельно биологической эволюции. При увеличении Рис. 2. Шагающий робот —
числа «ног» робота могут «многоножка»
возрастать трудности управления им, связанные с числом степеней свободы в каждой
из конечностей. И биологическая эволюция, и развитие техники делают выбор из двух возможностей. На ранних этапах эволюции возможны системы, состоящие из очень значительного числа органов (например, конечностей) с относительно небольшим числом степеней свободы в каждом из них (так упрощенно можно описать структурный тип морфологии членистоногих). На высших этапах эволюции (у позвоночных) число органов (в пределах, заданных билатеральной симметрией и противо-постановлением задней и передней части) минимально, но число степеней свободы в каждом из органов может быть значительным.
Очень упрощая, можно было бы сказать, что для робота, передвигающегося в вертикальном положении, четырех или трех «ног» много, а одной — недостаточно. Число «рук» (и прямо с ними соотнесенных глаз) определяется прежде всего характером задач, ставящихся перед роботом. Например, для автоматизации сложных процессов типа сборки объекта из деталей и манипуляций с различными инструментами необходимо взаимодействие двух манипуляторов, один из которых (по функции сходный с левой рукой) удерживает детали в заданном положении, а другой (функционально сходный с пра-
вой рукой) производит с ними нужные операции [17, с. 92].-При увеличении числа степеней свободы каждой из рук и при возрастании требуемой точности обработки зрительных изображений для управления роботом могут потребоваться не большая и малая вычислительные машины (как в уже осуществленных к настоящему времени машинных комплексах), | а две большие вычислительные машины примерно одного класса, снабженные специализированными устройствами.
Будущего робота, характеризующегося билатеральной симметрией, можно себе представить как двурукого и двуглазого, Каналы передачи информации от глаза и руки к вычислительной системе могут перекрещиваться по типу организации каналов информации в центральной нервной системе (рис. 3). Если две вычислительные машины, управляющие таким роботом, решают также и задачи ввода и вывода языковой информации и осмысления фраз на устном языке, то в' подобном двухмашинном комплексе можно было бы видеть модель двух полушарий головного мозга человека.
Сопоставление системы двух полушарий головного мозга, с комплексом вычислительных машин (в частности, с двучленным комплексом) может представить интерес и для работ по «искусственному интеллекту», и для изучения мозга. Такое сопоставление в какой-то степени проясняет универсальность причин, по которым именно двухмашинный комплекс оказывав ется наиболее эффективным способом организации вычислив тельных систем.
Всякая кибернетическая система (автомат или комплекс автоматов) решает конкретные задачи в определенной среде. Поэтому различие самой системы и среды предполагает необходимость выделения в системе такой подсистемы, которая ответственна за ориентацию в данной конкретной среде или за решение данной конкретной задачи. Наряду с таким текущим решением неотложных задач всякая кибернетическая система занята планированием своего поведения в целом.
Одной из ведущих идей кибернетической физиологии активности, созданной Н. А. Бернштейном, было наличие у каждого живого организма планов его будущего поведения [18]. По этой именно причине организм нельзя описать простыми схемами, включающими только его память (прошлое системы) и реакции на внешние стимулы (настоящее системы). Живая система всегда в какой-то мере обращена к будущему. А включение планирования будущего как важнейшего составного звена управления предполагает выделение соответствующей подсистемы. Поэтому и неизбежно наличие хотя бы двух выв деленных подсистем: одной, решающей текущие задачи
и ориентирующейся в реальном пространстве — времени, и другой, планирующей будущее поведение всей системы.
Этому не противоречит то, что каждая из подсистем -и «законодательная» (планирующая) часть, и часть «исполни-
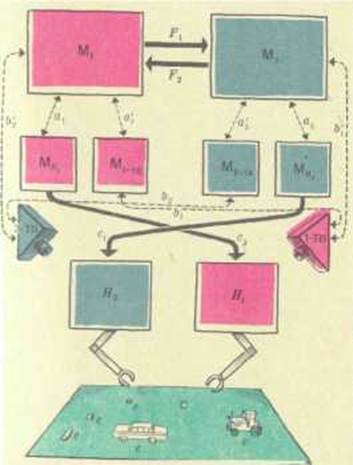
Рис. 3. Схема управления роботом с билатеральной симметрией:
М! — «левая» большая вычислительная машина; М2 — «правая» большая вычислительная машина; Fb F2 — каналы связи между вычислительными машинами: Ми и МН2 - спе-цализированные устройства для управления «правым» и «левым» манипуляторами; М!_тв и М2_тв — специализированное устройство для управления движением «правой» и «левой» телевизионной камеры и обработки правого и левого изображения: Н] — манипулятор (искусственная «правая рука»). Н2 - манипулятор (искусственная «левая рука»); аь ai', а2, а2' — каналы передачи информации между большими вычислительными машинами и специализированными устройствами, bb t>i', b2, Ь2' — каналы передачи оптической информации и сигналов, управляющих движениями телевизионных камер; сь с2 — каналы управления манипуляторами; С — среда, в которой работает робот; е — объекты с которыми работает робот
тельная» — может, в свою очередь, иметь при себе подсобные специализированные устройства (в том числе — в случае вычислительной системы — и особые машины). Сходным образом и каждое полушарие мозга имеет ряд специализированных отделов (затылочный, теменной, височный, лобный), каждый из которых ведает различными функциями. Двучленность комплекса (как машинного, так и состоящего из двух полушарий) нисколько не исчерпывает его описания (даже на уровне общей структуры или «макроструктуры»), но дает исходную схему для описания.
Предположение о том, что работу головного мозга можно в определенном смысле моделировать именно двухмашинным комплексом, было высказано автором настоящей книги в 1962 г. [19, с. 92]. Реальность такой модели подтверждается в настоящее время как кибернетическими работами по созданию двухмашинных комплексов, так и нейрофизиологическими экспериментами последних лет, полностью перевернувшими взгляды на соотношение двух полушарий мозга.
ДВА ПОЛУШАРИЯ
Согласно традиционным выводам нейрофизиологии, у взрослых людей (в подавляющем большинстве случаев — правшей) левое полушарие считается доминантным — главным. Оно управляет движениями главной — правой — руки и речью (как будет видно из дальнейшего изложения, некоторые важные функции, связанные с речью, исполняет другое полушарие; в этом смысле термин «доминантный» несколько условен). Функции правого полушария, которое у правшей ведает левой рукой, до последних лет оставались неясными, хотя удивительная для того времени догадка о них, теперь подтвердившаяся, была высказана английским неврологом X. Джексоном еще 100 лет назад. Джексон полагал, что правое полушарие занято прежде всего наглядным восприятием внешнего мира — в отличие от левого полушария, которое преимущественно управляет речью и связанными с ней процессами. Что же касается звуковой речи, правое полушарие, по Джексону, может производить только такие словесные формулы, которые как бы не членятся на части, а целиком служат автоматически произносимым обозначением целой ситуации. «Здравствуйте!», «Пожалуйста!», «Простите!». Проверка и уточнение этой гипотезы оказались возможными лишь недавно благодаря материалу, накопленному при нейрохирургических операциях над мозгом, в частности при рассечении двух полушарий мозга (ср. [149]).
Дата добавления: 2015-03-03; просмотров: 1224;