Уравнения движения сплошной cреды.
В теоретической механике в основном имеют дело с сосредоточенными или концентрированными силами, т.е. действующими в точке. В механике сплошной среды рассматриваются распределенные силы, т.е. силы, действующие в каждой части объема V или на каждом элементе поверхности å сплошной среды. Причем при стремлении бесконечно малого элемента объема или поверхности к нулю главный вектор действующих на него сил также стремится к нулю.
Силы, распределенные по объему V, называются объемными или массовыми. Пусть F главный вектор массовых сил, действующих на элемент массы Dm. Тогда плотность массовой силы в данной точке
Á = lim F / m . (2-16)
Dm®0
Для малой частицы F » Á Dm.
Иногда рассматривают силу Ф, приходящуюся не на единицу массы, а на единицу объема
Ф= lim (F /DV) ,
DV ®0
т.е. Ф= r Á. Размерностью произведений ФdV и Ádm является сила; размерностью Á является ускорение, а Ф- ускорение, умноженное на размерность плотности r сплошной среды.
Массовыми силами являются: сила тяжести (вес); гравитационные силы;силы инерции; электромагнитные силы.
В механике абсолютно твердого тела действие любой системы сил эквивалентно действию ее главного вектора и главного момента. В механике деформируемых сред существенен характер распределения сил по телу. Если, например, металлический шток продольно перемещается в среде, плотно его обжимающей по цилиндрической поверхности, то по этой поверхности на шток действуют поверхностные силы. Здесь
p= lim (DP/ Df) - плотность распределения внешних поверхностных сил;
Df®0
DP - изменение суммарной силы, действующей на цилиндрическую поверхность штока; Df - ограниченный участок поверхности штока.
В общем случае внешние поверхностные силы могут действовать не по всей длине тела, а во множестве мест, распределенных случайным образом по длине. Так происходит при бурении нефтяных и газовых скважин, где труба, имеющая меньший наружный диаметр по сравнению с внутренним диаметром поверхности затрубного пространства, под действием разного рода нагрузок изгибается и трется о стенки скважины.
Выделим в сплошной среде тела некоторый произвольный объем V и разобьем его сечением S на две части V1 и V2. (рис. 2.2)
Если рассматривать движение одной из частей, например V1, то действие на нее второй части V2 необходимо заменить распределенными по V1 массовыми силами и распределенными по S поверхностными силами.
Сечение S можно проводить по-разному, и тогда распределенные по поверхности S силы будут различаться.

|
Рис. 2.2
Силы внутренних напряжений
Возьмем некоторую точку М внутри тела и рассмотрим в ней различные площадки df. Ориентацию этих площадок будем определять нормалью n к ним, а полную силу, действующую со стороны части среды в объеме V2 на часть среды в объеме V1 на площадки df с нормалью n обозначим через d P. Далее примем d P= = s n d f , где s n - конечный вектор.
Вектор sn можно рассматривать как поверхностную плотность силы взаимодействия разделенных частей вдоль площадки d f. В общем s n может зависеть от ориентации площадки d f и других ее геометрических свойств. Направление нормали n будем выбирать всегда так, чтобы она была внешней по отношению к той части среды, на которую действует вводимая сила sndf. Так, например, влияние объема V2 на V1 будем заменять распределенными силами sn df, а влияние объема V1 на V2 - распределенными силами s-n df = - sn df (рис.2.2). Такого рода поверхностные силы можно вводить в любой точке сплошной среды. Это силы внутренних напряжений.

|
Рис.2.3 Разложение сил внутренних напряжений.
sndf= s nn n df + snt t df , где s nndf - нормальная компонента силы внутреннего напряжения; sntdf- касательная или тангенцальная сила (сила внутреннего трения).
Поверхностные силы s n df могут быть и внешними.
В каждой точке M сплошной среды существует бесконечно много векторов s n , соответствующих бесконечному набору площадок df, проходящих через эту точку. Однако между ними имеется универсальная, независящая от частных свойств движущейся среды, связьdzpp.ений и ___________________________________________________________________________________________________________________.
Уравнение количества движения (импульса).
Основным динамическим уравнением движения материальной точки является 2-й закон Ньютона F = m a , где a= d u /dt
Так как масса постоянна m= const, то
m d u / dt = d( mu) / dt= F.(2-17)
Произведение mu называется количеством движения точки или импульсом.
Для системы из n материальных точек с массой каждой из них m, движущихся со скоростью vi можно написать d(mi ui)/dt = Fi ,
 d(mi ui)/ dt= d ( mi ui)/ dt= Fi (e). (2-18)
d(mi ui)/ dt= d ( mi ui)/ dt= Fi (e). (2-18)
Здесь справа стоит сумма только внешних по отношению к системе сил, т.к. внутренние силы взаимодействия по 3-му закону Ньютона существуют попарно и при суммировании сокращаются. Выражение (2-18) можно переписать
Q= mi ui= m u*, (2-19)
где m= mi - масса всей системы; u * - скорость центра масс системы из точек.
Причем u *= m-1 mi ui
Вектор Q называется количеством движения системы. Тогда уравнение количества движения для системы из n материальных точек можно записать в форме
dQ/ dt= Fi(e) или m d u */ dt= Fi(e). (2-20)
Производная по времени от количества движения системы материальных точек равняется сумме всех действующих на систему внешних сил.
Для конечного индивидуального объема V сплошной среды, ограниченного поверхностью S , напишем уравнение количества движения
dQ/ dt=  Frdd +
Frdd +  sndf, (2-21)
sndf, (2-21)
где Q= u rdd (dd- элементарный объем); Frdd - сумма внешних массовых сил и sndf - сумма поверхностных сил, действующих на среду в объеме V, соответственно.
Следовательно, для любого индивидуального объема V сплошной среды можно записать уравнение количества движения
d ( urdd)/ dt=  Frdd + sndf. (2-22)
Frdd + sndf. (2-22)
Если на массу в объеме V дополнительно действуют еще внешние сосредоточенные в точке силы или силы, сосредоточенные вдоль некоторых линий, то их сумму надо добавить в правую часть (2-22).
С учетом теоремы Гаусса- Остроградского уравнение (2-22) можно переписать в дифференциальной форме при r= const [2]
r d u / dt= Fr + ¶ s1 /¶ x+ ¶s2 / ¶ y+ ¶ s3 / ¶ z , (2-23)
где s1 , s2 , s3 - напряжения, направленные параллельно координатным плоскостям прямоугольной декартовой системы координат.
Уравнение моментов количества движения
Умножив уравнение mdu/dt= Fвекторно слева на радиус вектор рассматриваемой точки массой m относительно некоторой точки О- начала инерционной системы координат, получим уравнение моментов количества движения для точки
dK/ dt= Ф, (2-24)
где K= rx mu; Ф = r x F.
Для массы n материальных точек с массами mi , движущимися со скоростями ui , можно написать
d(ri x mi ui)= ri x Fi ,
где Fi - главный вектор всех, в том числе и внутренних сил по отношению ко всей системе сил, действующих на рассматриваемую точку с массой mi.
В сумме для K= (rix m ui) получим
dK / dt= (rix Fi (e)). (2-25)
Здесь справа в силу 3-го закона Ньютона стоит сумма моментов только внешних для всей системы сил.
Следует отметить, что момент количества движения системы материальных точек можно записать в форме
K= r* x mu*+ (ri отнх mui отн) , (2-26)
где m= mi ; r*, u*- радиус- вектор и скорость движения центра масс; ri отн , ui отн - радиус- вектор и скорость движения i-й точки относительно центра масс и движущейся вместе с центром масс.
Моментом количества движения конечного объема V сплошной среды обычно называют [2]
K= r xur dd ,  (2-27) где r - радиусы- векторы точек сплошной среды относительно некоторой неподвижной точки O, а u - их скорости.
(2-27) где r - радиусы- векторы точек сплошной среды относительно некоторой неподвижной точки O, а u - их скорости.
Если скорость объема d сплошной среды u= u*+ u отн , где u* - скорость рассматриваемой точки относительно центра масс, то можно записать
K=r x Q+  rотн х uотн r dd ,
rотн х uотн r dd ,
где Q= m u*- количество движения материальной точки массы m, совпадающей с центром масс.
Возможна также запись K*= rотн х uотн r dd .
Момент количества движения равен [2]
K= r xur dd + k r dd, (2-28)
где k - плотность собственных или внутренних моментов количества движения.
С учетом изложенного, уравнение моментов количества движения системы материальных точек конечного индивидуального объема V сплошной среды можно записать в форме
d( r xur dd + k r dd)/dt=
= r xаr dd + rx sndf + hrdd+ qndf. (2-29)
Производная по времени от момента количества движения произвольного индивидуального объема V сплошной среды (с учетом собственных моментов) равна сумме моментов внешних массовых и поверхностных сил, действующих на этот объем, и сумме моментов, действующих на этот объем распределенных массовых и поверхностных пар, вызванных внешними по отношению к объему материальными объектами. Здесь вектором а обозначено ускорение от массовых сил, например ускорение свободного падения.
Уравнения (2-22) и (2-29) являются базисными векторными уравнениями, и они применяются для любых сплошных сред и любых движений.
В классическом случае уравнение (2-29) при отсутствии внутренних моментов количества движения и распределенных массовых и поверхностных пар имеет вид
d( r xur dd)/dt= r xаr dd + А df, (2-30)
где А=r x sn
В случае непрерывных движений сплошной среды можно, воспользовавшись равенством А= А1 cos (n, x)+ А2 cos(n, y)+ А3 cos(n, z) и теоремой Гаусса- Остроградского, получить
Аdf=  divА dd .
divА dd .
Моменты распределенных поверхностных пар можно представить в виде Qn= Qini .
Тогда с помощью теоремы Гаусса- Остроградского Qndf= div Qdd .
Полагая dm= rdd= const, уравнение (2-29) перепишем
d (rxur +kr dd)/dt= r xаr dd + [divА + div Q] dd + hrdd .
Откуда в дифференциальной форме
rd (r xu +k)/dt= r r xа + divА + div Q + hr . (2-31)
Так, для вращающегося относительно своей оси с угловой скоростью W стержня при отсутствии массовых сил (а=0), распределенных массовых (h=0) и поверхностных пар (Q=0) дифференциальное уравнение момента количества движения запишется r¶ (r2W) / ¶ t= ¶(rt)/ ¶x.
Здесь k= r2W ;¶ А/¶ х= ¶(rt)/¶х; t - касательные напряжения по сечению стержня.
Если рассматривать максимальные касательные напряжения на наружной цилиндрической поверхности радиусом ro и учитывать, что возникающие напряжения направлены в противоположную от скорости движения сторону, то это уравнение можно переписать в форме
ror ¶ W / ¶ t= - ¶ tmax / ¶ x. (2-32)
Положим теперь, что на стержень действуют какие-либо внешние объекты, приводящие к появлению распределенных поверхностных пар.
Тогда можно записать r¶ (r2W)/ ¶ t= ¶(rt)/ ¶x + ¶ Q / ¶x.
Пусть при вращении на индивидуальный объем среды действует сила трения, создающая, момент h=rх vhdf , где v- скорость скольжения поверхности стержня относительно контактирующей поверхности; h - коэффициент трения.
Из теоремы Гаусса- Остроградского следует
h=rх vhdf= div (rх vh)dd
Так как это взаимодействие происходит только по поверхности, то r= ro. В связи с чем ¶ Q / ¶x= ¶ (r2oW h)/ ¶x.
Из последнего равенства следует, если h= const, то ¶ Q / ¶ x = 0. Обычно коэффициент потерь на трение является функцией скорости скольжения, необязательно линейной. Связь с длиной стержня может быть и есть, например, при проводке скважин, но весьма неоднозначная.
2.4. Линейное упругое тело.
Линейное упругое тело является частной моделью сплошного тела.
Упругим телом, по Седову [2], называется среда, в которой компоненты тензора напряжений в каждой частице являются функциями компонент тензора деформаций, компонент метрического тензора, температуры и, возможно, других параметров физико-химической природы (например, концентрации фаз).
Уравнения движения в перемещениях, уравнения Ламе, имеют вид
(l+ m) grad (div w) + mDw+ rF= ra (2-33)
или в декартовой системе координат
rax= (l+ m) ¶(¶ w1 /¶ x+ ¶ w2 /¶ y+ ¶ w3 /¶ z)/ ¶ x+
+ m (¶ 2w1/¶ x2+ ¶ 2w1/¶ y2+ ¶ 2w1/¶ z2)+ rFx ,
ray= (l+ m) ¶(¶ w1 /¶ x+ ¶ w2 /¶ y+ ¶ w3 /¶ z)/ ¶ y+
+ m (¶ 2w2/¶ x2+ ¶ 2w2/¶ y2+ ¶ 2w2/¶ z2)+ rFy ,
raz= (l+ m) ¶(¶ w1 /¶ x+ ¶ w2 /¶ y+ ¶ w3 /¶ z)/ ¶ z+
+ m(¶ 2w3 /¶x 2+¶ 2w3 /¶ y 2+ ¶ 2w3 /¶ z2)+ rFz ,
где w1, w2, w3 - компоненты вектора перемещения w; a - вектор ускорения.
Вместо коэффициентов Ламе l и m в теории упругости введены модуль Юнга (модуль упругости)
E= m(3l+ 2m)/ (l+ m) (2-34)
и коэффициент Пуассона, характеризующий сужение поперечного сечения.
c= l/[2(l+ m)]. (2-35)
Эти коэффициенты можно также определить из выражений
c=Drl/(rD l); E= Ds l/D l,
где D r, D l, Ds- соответственно, отклонения радиуса сечения, длины участка, напряжения.
После упрощения уравнения Ламе записываются в форме
(¶ 2a/¶ t 2)xi = F+ (l+ m)r -1o grad (div w) + m r -1oD w. (2-36)
При наличии движения температура в упругом теле, вообще говоря, не остается постоянной, а меняется как с течением времени, так и от точки к точке объема, занятого упругим телом.
Однако в случае волновых процессов, распространяющихся в упругом теле, температура из-за ее малой скорости изменения может считаться постоянной, т.е. процесс будет адиабатическим.
В этой связи, полагая массовые силы равными нулю F= 0, для компонент вектора перемещения w из уравнения (2-36) выводятся уравнения [2]
¶ 2 w1/¶ x 2= a-21¶ 2w1/¶ t 2, (2-37)
¶ 2 w2 /¶ x 2= a-22 ¶ 2w2 /¶ t 2, (2-38)
¶ 2 w3 /¶ x 2= a-22 ¶ 2w2 /¶ t 2, (2-39)
где a1= [(lа +2mа)/ r]1/2- скорость распространения продольной волны возмущений; a2= (mа/r)1/2- скорость распространения поперечной волны возмущения.
Здесь указаны значения коэффициентов Ламе для адиабатических процессов. В случае изотермических процессов в качестве нижнего индекса станет применяться буква «и». Когда не учитываются термодинамические особенности, то индексы не будут применяться.
Следовательно, плоская упругая волна представляет собой две независимо распространяющиеся волны. В одной смещение w1 совпадает с направлением распространения самой волны. В другой - смещение лежит в плоскости, ортогональной к ее направлению, т.е. существуют две скорости звука. Например, для железа a1 = 7000 м/с, а2 = 3200 м/с. Поперечная волна сопровождается вращением частиц среды, но в ней не происходит изменения их объема. В продольной- наоборот, изменяется объем частиц, но нет вращения.
Скорость продольных волн в изотропной твердой среде в справочнике по физике Яворского В.М., Детлафа А.А. описывается также выражением
a1= [Er -1(1- c) (1+c)-1 (1- 2c)-1]1/2=q (Er -1)1/2, (2-40)
а поперечных
a2=(G/ r)1/2 , (2-41)
где G= E/[2(1+c)] - модуль сдвига; q= [1- 2c2/(1-c)]-1/2.
Для стали модуль упругости (продольной упругости) равен Е@ @2,1*105МПа, коэффициент Пуассона - c= 0,24- 0,28; модуль сдвига G@ 8*104МПа. Тогда из (2-40) получим
а1» 1,106(Е /r)1/2.
Если полагать плотность, коэффициенты Ламе постоянными для данного материала, то, экспериментально определив скорость распространения звуковой волны, величину модуля упругости можно вычислить из выражения
E= a21r/q 2. (2-42)
Использованные выше коэффициенты в общем случае зависят от многих факторов. Поэтому при точных расчетах необходимо учитывать переменность указанных величин.
При растяжении (сжатии) упругую деформацию металла в машинострои-тельной практике описывают законом Гука s= Ee. Здесь e = D l/l-относительное удлинение.
Вообще, вопросами передачи энергии через металлические детали занимается также реология. До настоящего времени при традиционном подходе в этом процессе весьма много неясностей. Существует ряд гипотез и соответствующих феноменологических моделей Максвелла, Фойгта, Зинера.
Так, из часто применяемой при анализе модели Зинера следует, что передачу движения через элементарную частицу вещества можно описать общим уравнением
s+ te ds/dt = Е1(q+ts dq/dt),(2-43)
где Е1 - модуль упругости при изотермическом процессе депформации; te2- время релаксации при условии постоянной деформации; ts - время ретардации (запаздывания); q- деформация.
Реологические исследования дали основание ввести дополнение к закону Гука, учитывающее особенности передачи динамических воздействий и записываемое в преобразованиях по Лапласу (см. подробнее гл.3) следующим образом:
Еw= s(jw)/ q(jw)= Eu + jE, (2-44)
где w - частота колебаний.
Это уравнение позволяет представить процесс прохождения гармонического сигнала в виде частотной характеристики, показанной на рис. 2.4
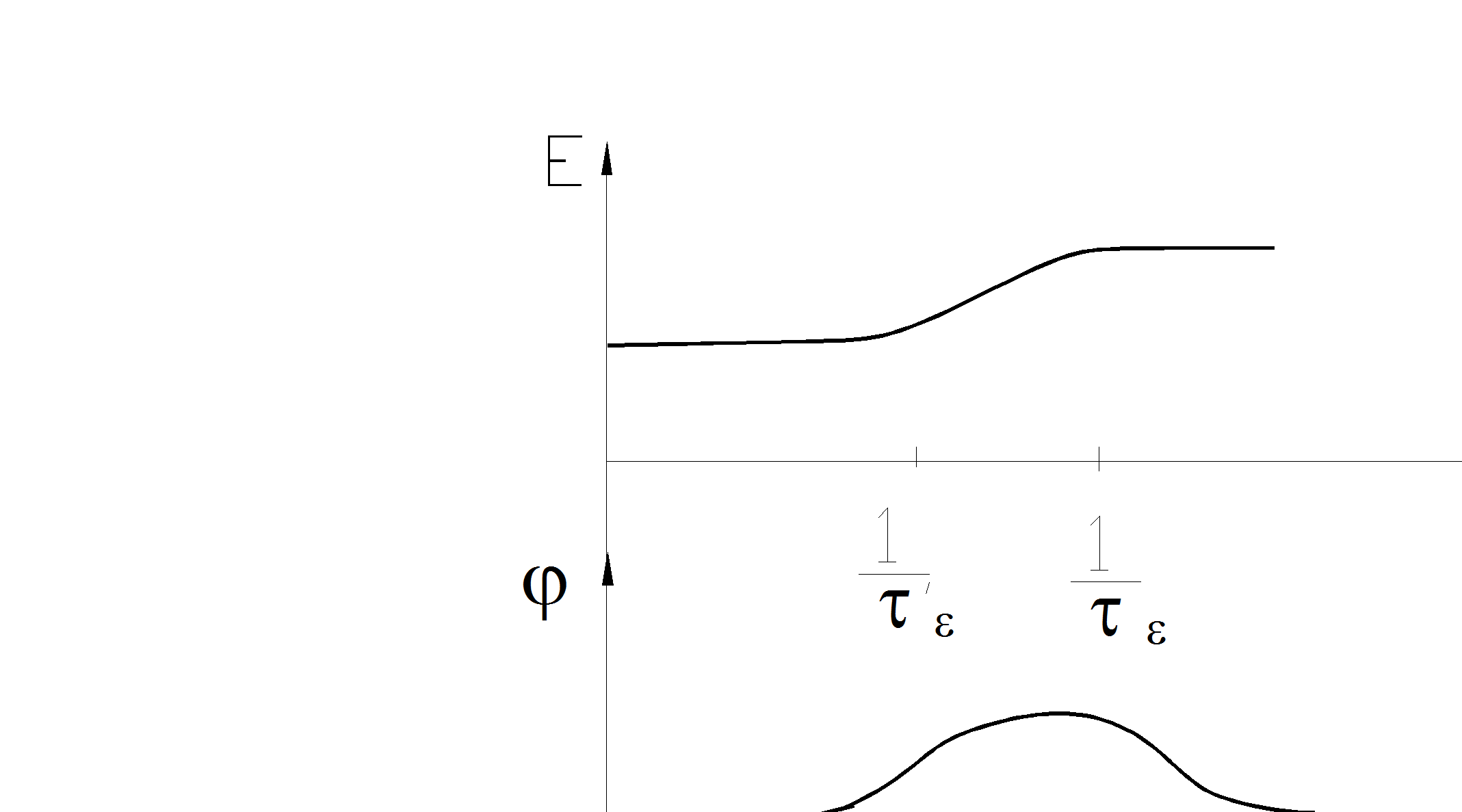
Рис. 2.4
Особенность прохождения гармонического сигнала через металл (t’e = teE2/E1; E2 - модуль упругости при адиабатической деформации; j - сдвиг по фазе).
Измеряя скорость распространения звуковых волн, коэффициент затухания и учитывая значение q (см.(2-40)) , можноопределить Еw. Кроме того, для процесса передачи мощности характерна нелинейная зависимость- гистерезисная петля, показанная на рис.2.5 .
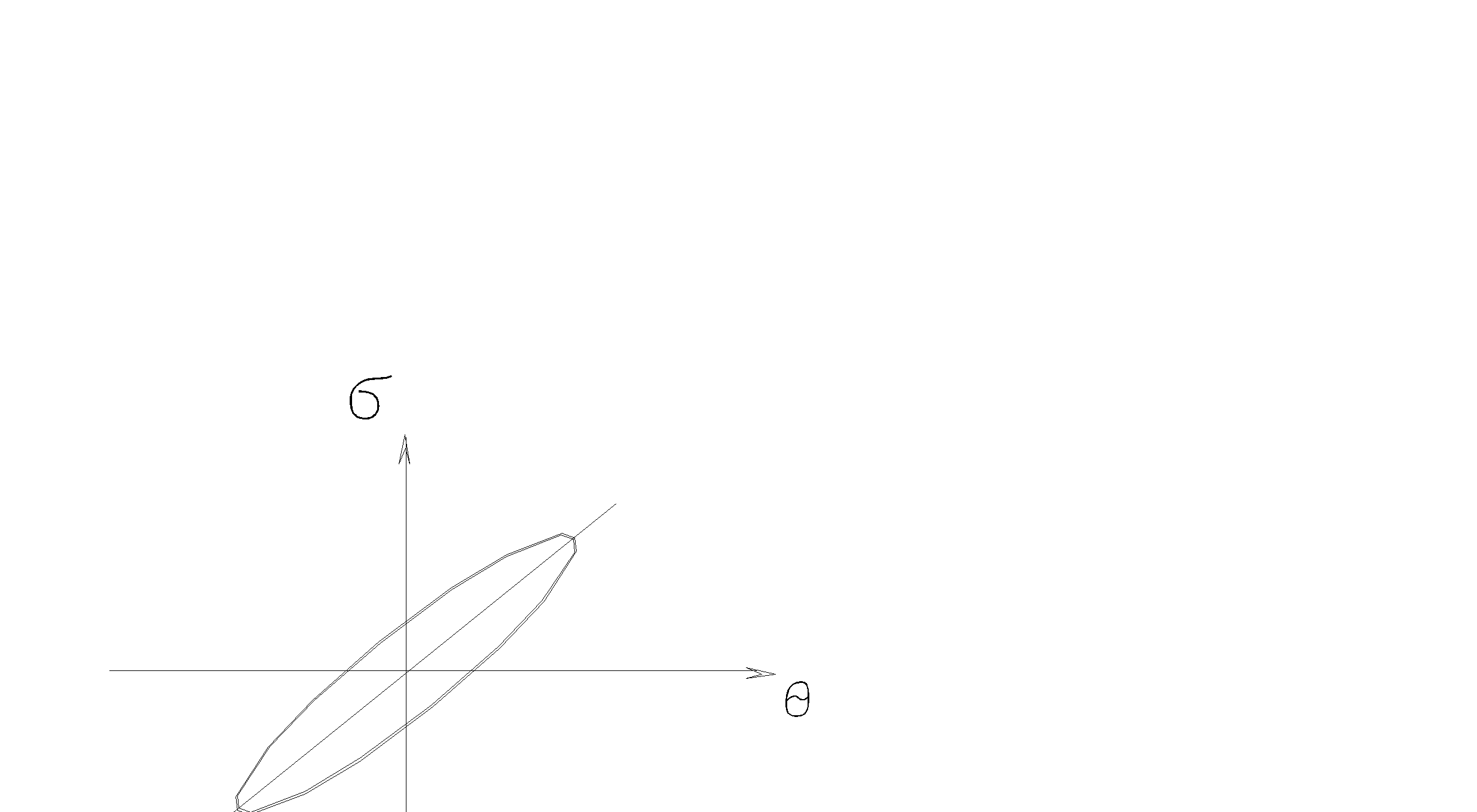
Рис.2. 5.
Гистерезисная петля.
Если обратиться к кристаллам, то закон упругой деформации может быть выведен из рассмотрения упругого взаимодействия атомов. Взаимосвязь сил отталкивания и притяжения имеет такой же характер, как и при взаимодействии ионов и электронов в атоме рис.2.6.
На больших расстояниях а притяжение и отталкивание пренебрежительно малы, но при сближении они возрастают. При таком выводе следует, что в зоне больших упругих деформаций или больших напряжений закон Гука становится нелинейным. Об этом свидетельствует и форма гистерезисной петли.
В случае скручивания закон Гука записывается в форме t = GJ- для малых деформаций. Здесь t- максимальное касательное (скалывающее) напряжение; G- модуль сдвига (для стали G= 8*104 МПа); J- угол сдвига (поворота) в радианах. Полный поворот сечения на расстоянии z от начала координат равен j=J‘z, где J‘= =dj /dz- относительный угол закручивания.
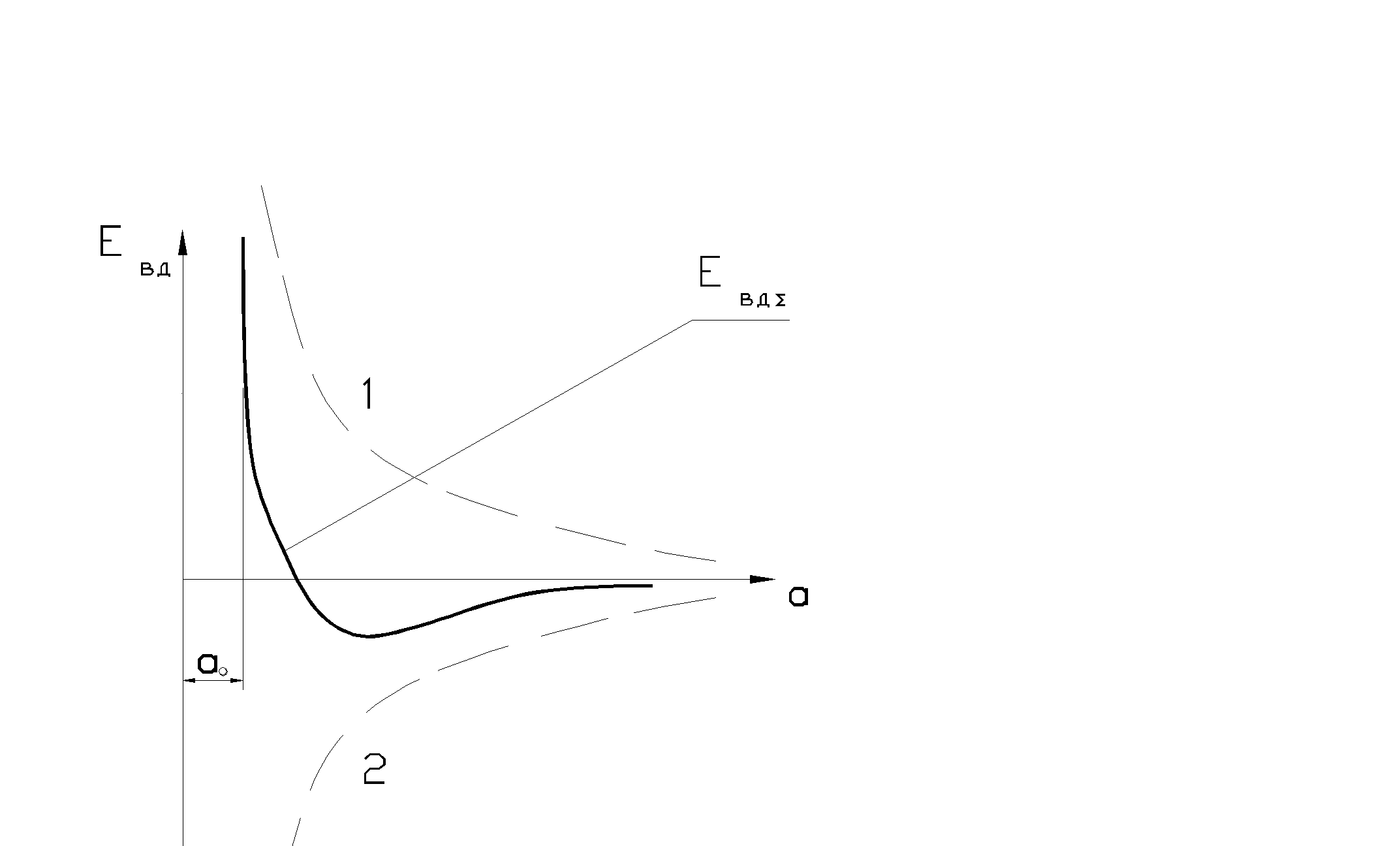
Рис. 2.6. Зависимость энергии взаимодействия Евд между ионами и электронами в кристалле: 1- силы отталкивания; 2- силы притяжения; Евдå- суммарная энергия взаимодействия.
Модули упругости определяют статическими и динамическими методами.
Статические. Под действием нагрузки происходит растяжение, измеряя которое, определяют модуль упругости E.
Недостаток заключается в том, что для получения точного результата нужна большая деформация, но при этом есть вероятность пластической деформации.
Динамические. Модуль сдвига G определяют по частоте крутильных колебаний. Модуль упругости E определяют по частоте изгибных колебаний.
Импульсный метод основан на определении скорости распространения волн через образец.
При всестороннем сжатии
s= KDV/ V, (2-45)
где К- модуль всесторонней объемной упругости; DV - изменение объема.
Приближенно DV/ V @ 3 Dl/ l= 3s / E, т.е. s/К= 3s/Е. Откуда К= Е/ 3.
В практике машиностроения обычно полагают E= const, G= const.
С учетом изложенного, с достаточной для практических расчетов точностью уравнение продольных колебаний можно записать в форме
¶ 2u / ¶ t 2= (E/r)¶ 2u /¶ x2, (2-46)
где u - перемещение вдоль оси.
При скручивании вала, стержня происходит последовательный поворот множества плоских поперечных сечений на расстоянии по оси друг от друга dx. Причем, как показывает теория упругости [2], эти сечения практичеси поворачиваются как твердые диски. Следовательно, точки двух сечений находящиеся на расстоянии ri от оси при повороте сечения на угол dj смещаются друг относительно друга на расстояние
dw2= ridj. (2-47)
Поэтому в случае отсутствия продольных колебаний и при действии только скручивающего импульса в стержне возникнут скручивающие движения, когда каждая точка от близлежащей будет смещаться на расстояние dw2. Подставим (2-47) в уравнение (2- 38) и сократим на ri
¶ 2j / ¶ t 2= (G /r)¶ 2j /¶ x2. (2- 48)
Основные понятия теории сопротивления материалов.
Ниже рассматриваемые основные понятия теории сопротивления материалов (сопромата) базируются на положениях механики сплошных сред, приведенных в разделах 2.1- 2.4, из-за чего возможны повторения.
Если на стержень, площадь сечения которого равна f, в осевом направлении действует сила F, то в теле стержня образуются продольные напряжения
s= F/f. (2-49)
Из простых экспериментов получено, что под действием силы F происходит продольная деформация. При этом удлинение равно
Dl= Fl/(Ef)= JF, (2- 50)
где J= l/(Ef)- коэффициент продольной упругости.
Из этой формулы можно также определить относительное удлинение e = Dl /l = s / Е и закон, называемый законом Гука,
s = Еe. (2-51)
Если стержень имеет переменное сечение, то его удлинение будет
Dl=  Fili/(Eifi),
Fili/(Eifi),
где индекс i относится к каждому участку.
Дата добавления: 2015-02-23; просмотров: 1344;