Общие сведения о машинах и механизмах .
Машиной с точки зрения механики, называется система, в конечном итоге предназначенная для осуществления механических движений, связанных с выполнением того или иного процесса.
Механизм- это связанная система тел, являющаяся частью машины и преобразующая движения одного или нескольких тел в требуемые движения других тел.
Все машины выполнены из различных механизмов, узлов и деталей.
Машины условно подразделяются на три группы:
1) энергетические (электрические, тепловые, ядерные...);
2) технологические (металлообрабатывающие станки, буровые установки ...);
3) информационные (ЭВМ, ПЭВМ ....).
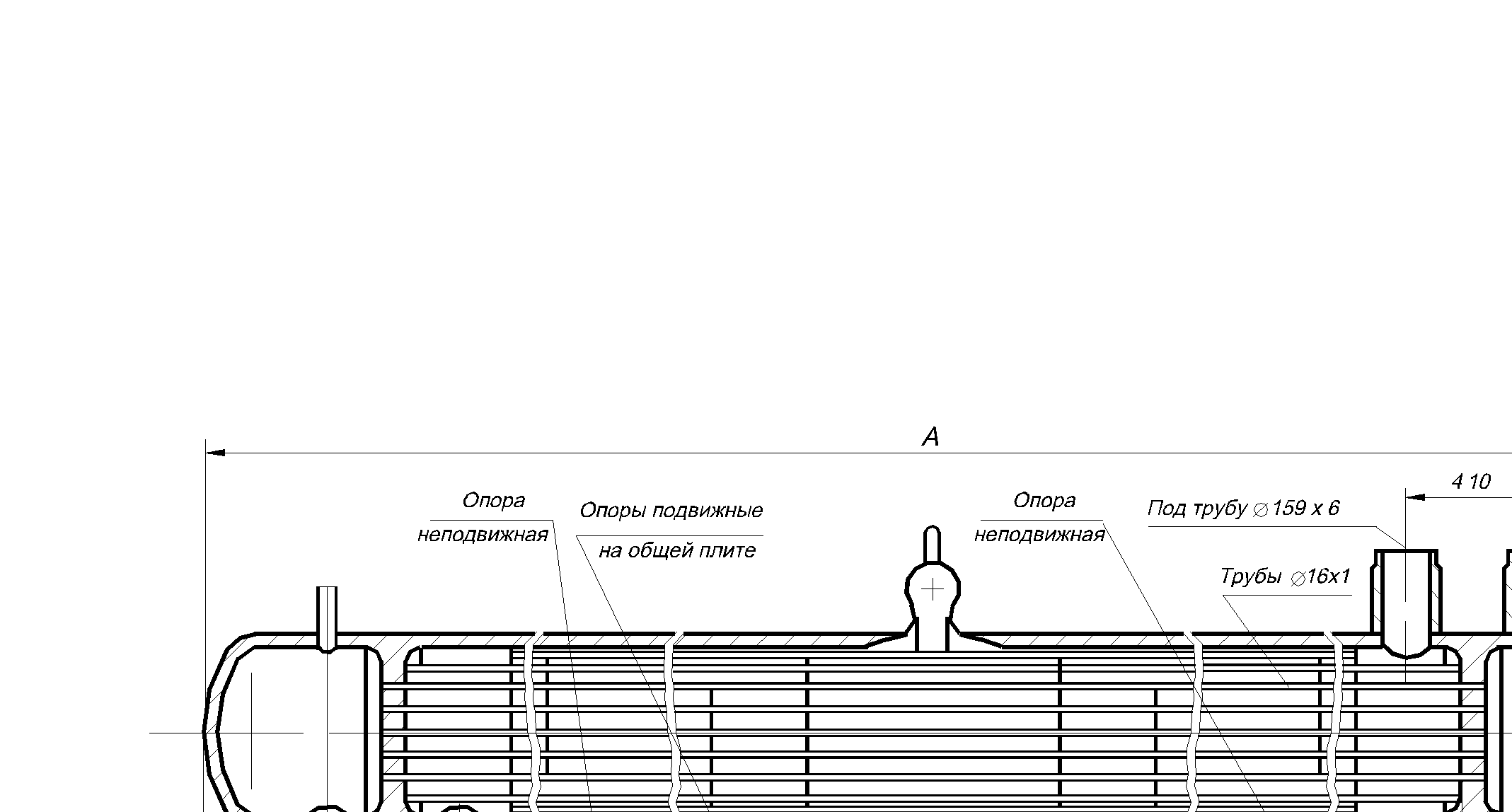
Рис 1.1 Модуль (теплообменный) Æ325 с опорами
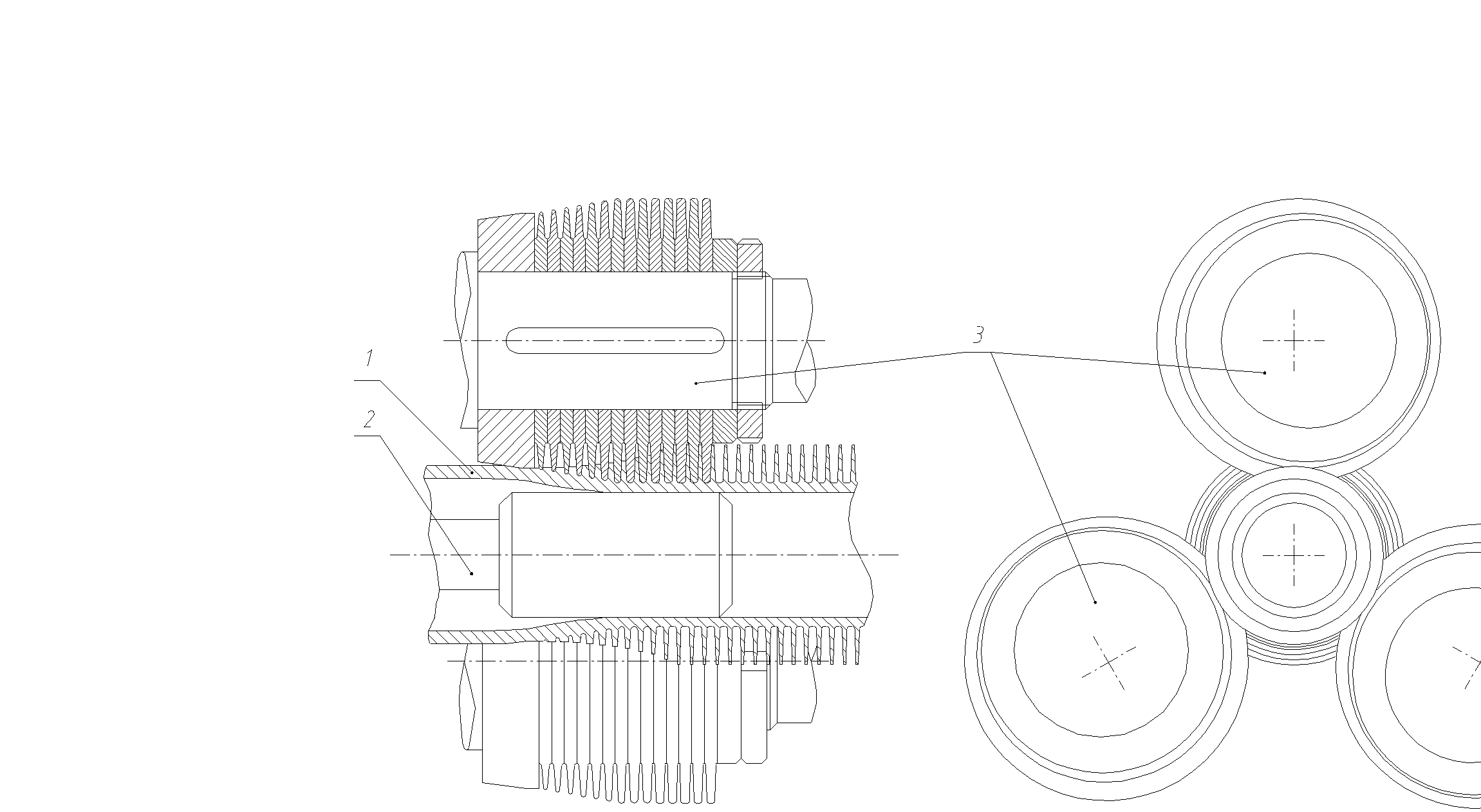
Рис. 1.2. Рабочая часть стана типа ХПРТ для накатки ребер в теплообменной
трубе.
К машинам предъявляются следующие основные требования: работоспособность, надежность, технологичность, экономичность, эргономичность.
Механизмы классифицируются по совокупности узлов, обеспечивающих выполнение необходимых функций. Различают следующие механизмы: 1) электромеханические (электрогенераторы…); 2) механические (редукторы…); 3) гидромеханические (насосы…); 4) пневмомеханические (компрессоры…); 5) паротурбинные (паро-генератор и турбина) и др.
Под механизмом иногда понимают последовательность взаимодействий в каком-либо процессе. В последнее время появилось понятие- наномашина, т.е. механизм, размеры деталей которого сопоставимы с размерами молекул. Вопросы наномеханики здесь не рассматриваются.
На рис. 1,1; 1,2 показаны механизмы, относящиеся к тематике специальности. Теплообменные устройства, подобные модулю на рис. 1.1, применяются для преобразования тепловой энергии в электричес-кую, затем используемую в разных целях, в том числе для выполнения механических движений. Биметаллические оребренные трубы, устанав-ливаемые в теплообменных устройствах, изготавливают разными способами, в том числе с помощью станов холодной прокатки труб (рис.1.2).
Машины и механизмы состоят из узлов и деталей.
Узлы- это совокупность деталей, выполняющих какую-либо функцию, и являющиеся законченной сборочной единицей. Они могут быть: а) подвижными и неподвижными; б) собраными с помощью резьбы, сварки, пайки и т.п.; в) подлежащими разборке или неразборными.
Детали могут быть: а) сварными; б) сложной конфигурации или простой; в) специального или общего назначения.
Механизмы состоят из звеньев. Простейшие механизмы формируются из кинематических пар, соединений 2-х сопри-касающихся пар. Сложные механизмы, например, паротурбинные приводы, состоят из относительно простых механизмов, парогенератора (теплообменника) и турбины.
Кинематические пары по характеру соприкосновения составляющих элементов подразделяются на низшие (контакт по плос-кости) и высшие (контакт по линиям или в точке).
Высшие пары имеют меньшие потери на трение, но низшие обладают большей нагрузочной способностью.
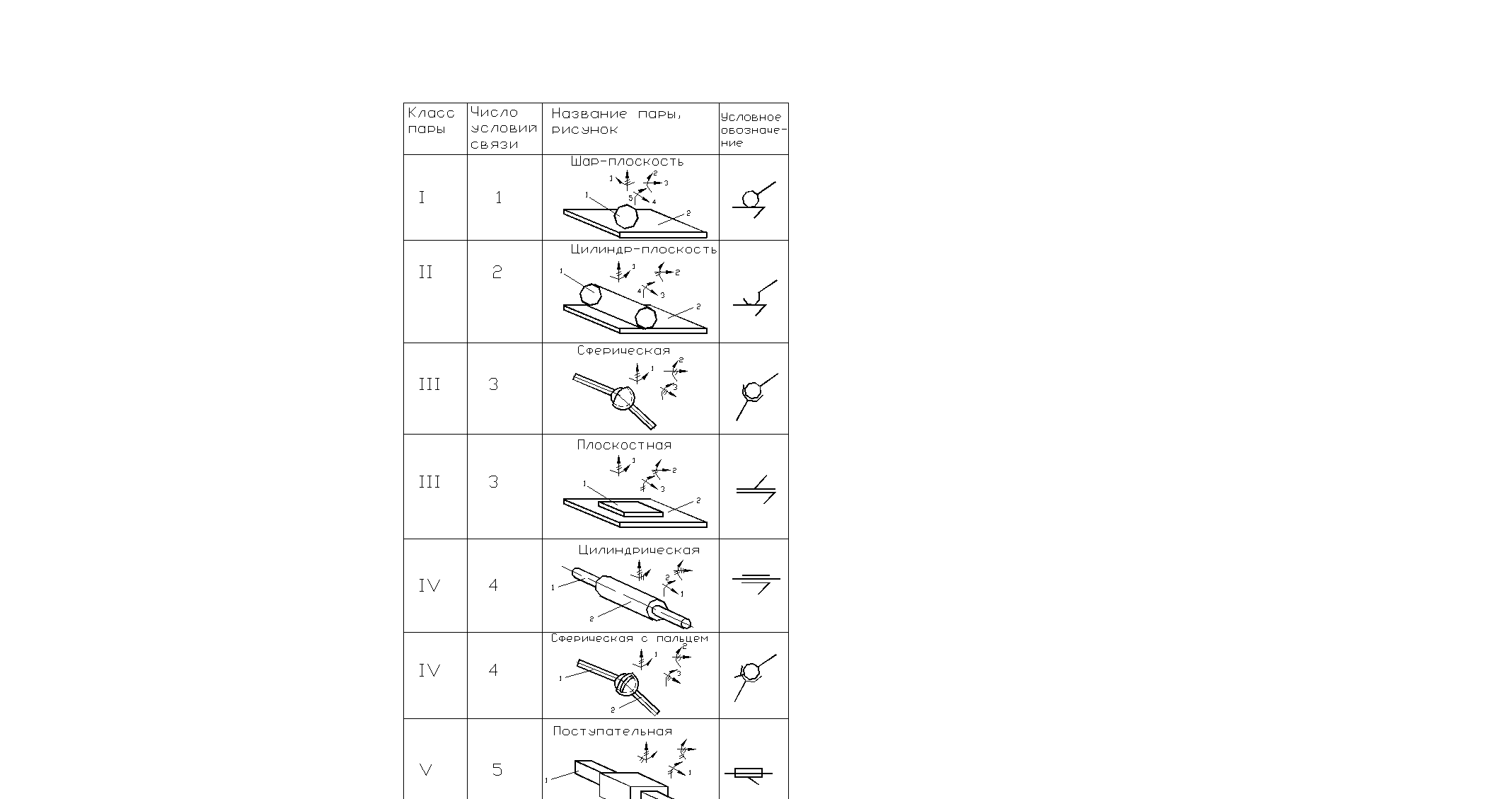
По числу наложенных условий связи S (или степенной подвижности Н) кинематические пары делятся по предложению академика Артоболевского И.И. на классы. Обычно рассматривают 5 классов пар, приведенных в таблице 1.1.
Таблица 1.1.
Система звеньев, соединенных с по-мощью кинемати-ческих пар, называет-ся кинематической цепью.
В зависимости от конструкции разли-чают замкнутые и незамкнутые кинема-тические цепи. В замкнутой кинемати-ческой цепи каждое звено входит не менее чем в две кине-матические пары, в незамкнутой (от-крытой) цепи имеются звенья, входящие лишь в одну кинемати-ческую пару.
Звено, относитель-но которого оценивают параметры движения, называют стойкой (корпусом, рамой...). Обычно в качестве стойки берут непод-вижное звено, а в транспортных маши-нах стойкой считают раму, корпус, движу-щиеся относительно земли.
Входным звеном называют звено, которому сообщается движение от двигателя.
Выходным (исполнительным органом) - звено, реализующее движение, для которого предназначен механизм.
Кинематические цепи классифицируются также по внешним признакам- плоские, пространственные, простые, сложные.
Проектирование структурной схемы механизма, состоящего из подвижных и неподвижных звеньев, кинематических пар называется структурным синтезом.
Определение количества звеньев и кинематических пар, классификация кинематических пар и т.д. называется структурным анализом механизма
Соответствие между положениями входных и выходных звеньев определяется с помощью кинематического исследования. При этом координаты выходных звеньев выражаются через координаты входных, которые принимаются в качестве обобщенных. Эти зависимости называются передаточными функциями.
Так, если передаточная функция для звена n дана в виде
xn= xn(j1,j2), (1-1)
причем j1= j1(t), j2= j2(t) ,то скорость звена будет
dxn/dt= (¶ xn/¶j1) (¶j1/¶ t)+ (¶ xn/¶j2) (¶j2/¶ t), (1-2)
a ускорение-
d2xn/dt2 = (¶ 2 xn/¶j21) (¶j1/¶ t)2 + (¶ xn/¶j1) (¶ 2j2/¶ t2)+
+(¶ 2 xn/¶j22) (¶j2/¶ t)2 + (¶ xn/¶j2) (¶ 2j2/¶ t2), (1-3)
где ¶ xn/¶j1; ¶ xn/¶j2 - называются аналогами скорости; ¶ 2xn/¶j21 , ¶ 2xn/¶j22- аналогами ускорения.
В частности все передаточные отношения in = ¶j2/¶j1 могут быть постоянными. Тогда, если передаточная функция хn= хn(j1,j2) линейна, то такие механизмы называются передаточными.
Определение скоростей и ускорений часто осуществляется с помощью планов скоростей и ускорений.
Дата добавления: 2015-02-23; просмотров: 2432;