Автоматическое захватное устройство повышенной надежности
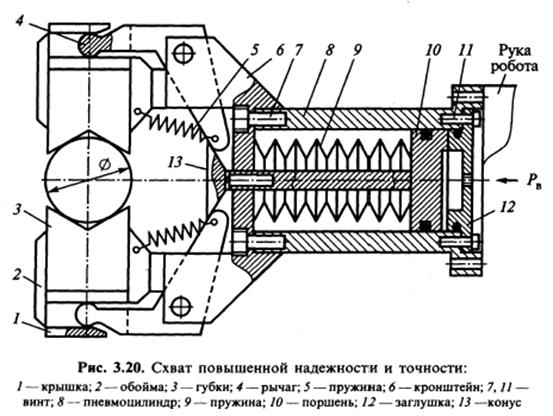
Схват предназначен для захвата заготовок в автоматическом режиме (рис. 3.20). При подаче воздуха в полость цилиндра 8 поршень 10 движется влево и сжимает тарельчатые пружины 9. Рычаг 4 за счет сил пружин 5 разводит в сторону губки 3. Рука робота подается к детали, которая оказывается между губками. Затем из полости пневмоцилиндра сбрасывается давление. Под действием пружины 9 поршень 10 со штоком идет вправо. Усилие от пружины 9 передается через конус 13 на рычаги 4, которые давят на губки 3 и зажимают деталь.
Особенности и преимущества конструкции схвата.
Повышенная надежность и безопасность. Это обусловлено принципом «обратного» действия. Зажим осуществляется за счет потенциальной энергии сжатых пружин. Перепады и срывы давления воздуха не влияют на силы зажима и удержание детали.
Высокая жесткость конструкции. Нет «слабых» звеньев. Вероятность поломки деталей ничтожно мала.
Очень высокая точность при захвате деталей. Губки 3 находятся в одной плоскости, движутся только по прямой и не отклоняются от оси как при холостом, так и при рабочем ходе (т. е. при зажиме).
Простота. Правая часть цилиндра 8 имеет фланец, легко и быстро крепится к стандартному фланцу руки робота. Кронштейн 6 выполняет сразу несколько функций — закрывает левую сторону пневмоцилиндра 8, служит несущей конструкцией для рычагов 4 и для размещения губок 3. Простота сборки и наладки.
Мобильность. Быстрая смена губок.
Повышение технологических возможностей при захвате заготовок различных диаметров и длин за счет применения «сдвоенных» сменных губок с регулируемым диапазоном захвата.
Дата добавления: 2015-02-23; просмотров: 2688;