Передаточная функция (1 стр 1)
1. Динамические нагрузки при пуске двухмассовых систем. Пути их снижения..... 1
2. Динамические нагрузки при выборе зазоров. Пути их снижения........................ 3
3. Постоянные и переменные потери в электродвигателях. Пути снижения потерь энергии в переходных режимах............................................................................... 4
4. Влияние параметров Uя, Rя, КF на вид механических и электромеханических характеристик ДПТ................................................................................................... 6
5. Двухзонное регулирование скорости двигателя постоянного тока последовательного возбуждения.............................................................................. 7
6. Система ТП-Д. Показатели регулирования........................................................... 8
7.Система ШИП-Д. Показатели регулирования........................................................ 9
8.Система Г-Д. Показатели регулирования............................................................. 10
9.Последовательная коррекция контура регулирования скорости с внутренним контуром регулирования М в системе УП-Д......................................................... 11
10. Регулирование положения. Параболический рег-р положения....................... 12
11. Влияние U1, X1, R1, X2 на вид механических характеристик АД................... 13
12.Электромеханические свойства АД..................................................................... 13
13. Система скалярного управления АД.................................................................. 13
14. Система ТРН-АД. Показатели регулирования.................................................. 13
15. Система полярного управления АД. Достоинства и недостатки...................... 13
16. Система векторного управления АД. Достоинства и недостатки..................... 13
17. Регулирование скорости АД в каскадных схемах. Электрический каскад...... 13
18. Взаимосвязное частотное регулирование скорости АД.................................... 13
19.Метод эквивалентных величин при выборе двигателей..................................... 13
Передаточная функция (1 стр 1)
Если на вход любой системы подать сигнал синусоидальной формы:
xвх(t) = Xm cos(wt) = Xm e jwt .
Очевидно, что выходной сигнал будет иметь ту же форму:
xвых(t) = Ym cos(wt+j) = Ym e j(wt+j) .
Зависимость же между амплитудами и фазами выходного и входного сигналов определяет ДУ движения системы. Возмем произвольное, считая помеху f(t) равной нулю:
(T22 p2 + T1 p + 1) xвых(t) = (k1 + k2 p) xвх(t) .
Подставим сигналы в уравнение движения:
T22(jw)2 Xвых e j(wt+j) + T1(jw) Xвых e j(wt+j) + Xвых e j(wt+j) = k1 Xвх e jwt + k2(jw) Xвх e jwt .
Найдем отношение выходного сигнала ко входному:
 .
.
Вывод 1: Частотная передаточная функция получается из обычной заменой оператора Лапласа s на комплексную частоту jw, т.е. в результате перехода от изображения Лапласа к изображению Фурье.
Вывод 2: ДУ движения системы связывает входной и выходной сигналы (т.е. функции времени), ПФ связывет изображения Лапласа тех же сигналов, а частотная ПФ связывает их спектры.
Частотная передаточная функция может быть представлена в следующих видах:
W(jw) = A(w) e jj(w), или W(jw) = P(w) + jQ(w) ;
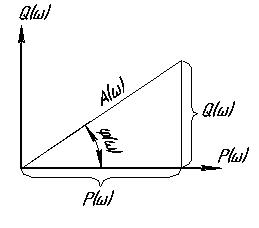 где: W(jw) – амплитудно-фазовая частотная характеристика (АФЧХ);
где: W(jw) – амплитудно-фазовая частотная характеристика (АФЧХ);
- A(w) - модуль частотной передаточной функции - находится как отношение модулей числителя и знаменателя (АЧХ):

- j(w) - фаза частотной передаточной функции - находится как разность аргументов числителя и знаменателя (ФЧХ):
- P(w) и Q(w) - вещественная и мнимая части частотной ПФ. Для их нахождения необходимо избавиться от мнимости в знаменателе, умножением на сопряженную знаменателю комплексную величину. Логарифмические ЧХ - ЛАЧХ & ЛФЧХПостроение ЛАЧХ & ЛФЧХ производится по выражениям: L(w) = lg |W(jw)| = lg A(w), [лог]; j(w) = arg(W(jw)), [рад].
Дата добавления: 2015-03-20; просмотров: 728;