Розробка системи автоматичного керування з використанням лінійно-квадратичного П-регулятора з наглядачем стану
На відміну від підходів класичної теорії керування, що намагається скоротити кількість розглянутих зв'язків і керований змінних, підхід сучасної теорії керування настроєний, навпаки, на більшу деталізацію математичних моделей, що пов'язано з розвитком засобів обчислювальної техніки. Лінійно-квадратичний регулятор (англ. Linear quadratic regulator, LQR) – один із видів оптимальних регуляторів, що використовується для керування складними багатомірними й багатозв´язними об'єктами управління. Даний регулятор використовує метод подання динаміки систем у вигляді простору станів - системи лінійних ЗДР у формі Коші, записаних в матричній формі.
У безперервному часі критерій оптимальності лінійно-квадратичного регулятора може бути представлений у такий спосіб:

| (23) |
де: x – вектор змінних стану,
u – вектор керуючих впливів,
 - матриці вагових коефіцієнтів.
- матриці вагових коефіцієнтів.
У класичній теорії керування зазвичай рекомендується критерій [9], що для систем у формі простору станів у безперервному часі може бути представлений у наступному вигляді:

| (24) |
Модифікуємо його, підставляючи значення похідної з рівняння системи, зведемо цей критерій до критерію J, підстановкою:

| (25) |

| (26) |

| (27) |
Аналогічний критерій можна записати для системи в дискретному часі:
 , ,
| (28) |
який зводиться до критерію J у дискретному часі підстановкою:

| (29) |
|
| (30) |

| (31) |
Для перевірки придатності розробленої математичної моделі високого порядку для завдань синтезу автоматизованих систем керування проведемо синтез лінійно-квадратичного П-регулятора. Для цього створимо в Matlab програму.
Представимо модель у вигляді матриць передаточних функцій:
P=[yy1_opup_1s yy1_opup_2s yy1_opup_3s yy1_opup_4s yy1_opup_5s yy1_opup_6s;
yy2_opup_1s yy2_opup_2s yy2_opup_3s yy2_opup_4s yy2_opup_5s yy2_opup_6s;
yy3_opup_1s yy3_opup_2s yy3_opup_3s yy3_opup_4s yy3_opup_5s yy3_opup_6s;
yy4_opup_1s yy4_opup_2s yy4_opup_3s yy4_opup_4s yy4_opup_5s yy4_opup_6s;
yy5_opup_1s yy5_opup_2s yy5_opup_3s yy5_opup_4s yy5_opup_5s yy5_opup_6s;
yy6_opup_1s yy6_opup_2s yy6_opup_3s yy6_opup_4s yy6_opup_5s yy6_opup_6s];
Для перетворення передаточних функцій у простір станів використаємо функцію MatLab ss:
P_ss=s s(P);
Для перетворення математичної моделі у дискретний час використовується функція c2d. Функція c2d виконує дискретизацію безперервної моделі. Ця команда підтримує кілька видів квантування / відновлення: відновлення нульового порядку (ZOH - Zero-Order Hold), відновлення першого порядку (FOH - First-Order Hold), апроксимацію Тастіна без і з попередньою модифікацією частот, з узгодженням полюсів і нулів. Синтаксис цих команд (з ZOH за замовчуванням) такий:
sysd = c2d(sysc,Ts) % Ts - період квантування або вибірки в секундах
sysc = d2c(sysd)
Дискретна функція за методом ZOH Hd (z) виходить з безперервної функції H (s) за такою схемою

Рисунок 4.1 – Схема перетворення безперервної функції у дискретну за методом ZOH
Пристрій ZOH генерує безперервний вхідний сигнал u (t), утримуючи постійним значення кожної вибірки u [k] протягом одного періоду квантування, тобто

Сигнал u(t) потім подається на безперервну систему H(s) і вихідний сигнал y(t) квантується кожні TS секунд, щоб отримати дискретний вихідний сигнал y[k].
Крок дискретності має бути обрано з урахуванням того, що процеси у замкненій системі будуть десь у 10 разів більш швидкими, ніж у об’єкті. Тобто знайти за формулою:

де:  ,
,
фунція mах(А) - повертає найбільший елемент, якщо А - вектор, або повертає вектор-рядок, що містить максимальні елементи кожного стовпця, якщо А - матриця, в багатовимірних масивах працює з першою не одиничної розмірності,
функція abs (X) - повертає абсолютну величину для кожного числового елемента вектора X,
функція eig (A) обчислює власні значення матриці A.
Перетворення у дискретний час:

де: P_ss -матриці станів,
P_ssd -матриці станів у дискретному часі.
Матриці параметрів регулятора розраховані за допомогою програми dlqr:


функція dlqr:


де Q,R,Q1,R1- вагові матриці.
Вагові матриці Q,R,Q1,R1 спочатку мають бути обрані одиничними (для зручності одиничну матрицю генерує програма eye). Після оцінки якості перехідного процесу матриці Q, R потрібно відкоригувати збільшивши відповідний елемент Q, якщо вихідна змінна має велике перерегулювання, і збільшивши R, якщо керуючий вплив перевищує обмеження.
На підставі побудованої математичної моделі високого порядку в пакеті Matlab проведемо математичне моделювання реакції замкнутої АСР із лінійно-квадратичним регулятором зі стандартним і модифікованим критерієм на збурення величиною -5% х.в.м. по всіх каналах ОУ (рис. 4.3).

Рисунок 4.3 - Модель замкнутої системи в Simulink
Перехідні процеси по збуренню:
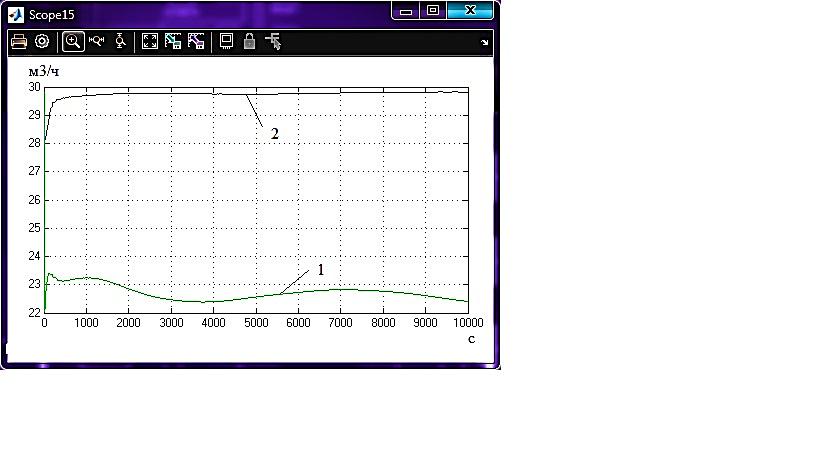
Рисунок 4.4 - Перехідний процес по першому каналу

Рисунок 4.5 - Перехідний процес по другому каналу
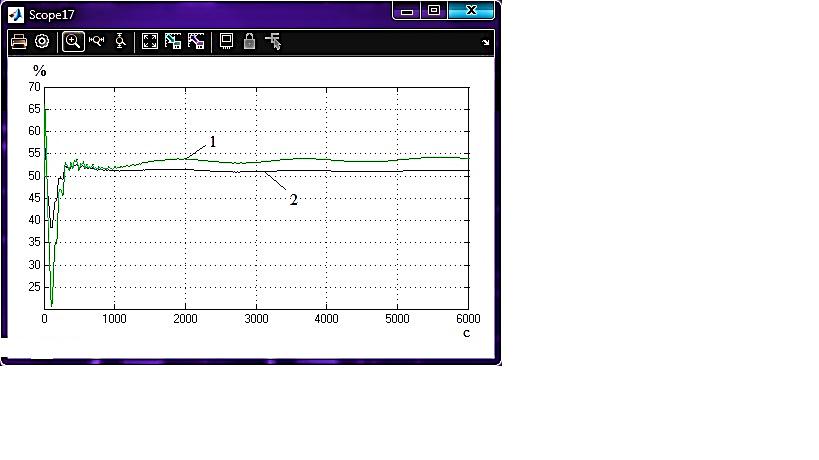
Рисунок 4.6 - Перехідний процес по третьому каналу

Рисунок 4.7 - Перехідний процес по четвертому каналу

Рисунок 4.8 - Перехідний процес по п'ятому каналу

Рисунок 4.9 - Перехідний процес по шостому каналу
Рисунок 2 – Переходные процессы АСР с линейно-квадратичным регуляторов при управлении по возмущению с использованием для синтеза регулятора стандартного (1) и модифицированного критерия оптимальности (2)
Как видно из графиков переходных процессов (рис.2), использование модифицированного критерия для синтеза линейно-квадратичного регулятора в сравнении со стандартным позволяет повысить качество системы регулирования, что особенно актуально для сложных технологических объектов управления, таких как атмосферная ректификационная колонна К-2. Для расхода газойля из стриппинга, при использовании модифицированного критерия оптимальности, время установления процесса – 2000с, для расхода дизеля из стриппинга – 8000с, для уровня керосина в ребойлере – 1000с, для температуры орошения – 1000с, для уровеня в конденсаторе – 750с, и для температуры флегмы – 6000с. Переходные процессы имеют значительно меньшую статическую ошибку, также уменьшилось время регулирования и величина перерегулирования.
Дата добавления: 2014-11-30; просмотров: 1492;