Розробка системи автоматичного керування з використанням MPC регулятора
Одним із сучасних формалізованих підходів до аналізу й синтезу систем керування, що базуються на математичних методах оптимізації, є теорія керування динамічними об'єктами з використанням прогнозуючих моделей - Model Predictive Control (MPC).
Цей підхід почав розвиватися на початку 60-х років для керування процесами й устаткуванням у нафтохімічному й енергетичному виробництві, для яких застосування традиційних методів синтезу було вкрай утруднене у зв'язку з винятковою складністю їхніх математичних моделей.
Основним достоїнством MPC-підходу, що визначає його успішне використання в практиці побудови й експлуатації систем керування, служить відносна простота базової схеми формування зворотного зв'язку, що сполучається з високими адаптивними властивостями. Остання обставина дозволяє управляти багатомірними й багатозв'язними об'єктами зі складною структурою, що включає нелінійності, оптимізувати процеси в режимі реального часу в рамках обмежень на керуюч і керовані змінні, ураховувати невизначеності в завданні об'єктів і збурень. Крім того, можливий облік транспортного запізнювання, облік змін критеріїв якості в ході процесу й відмов датчиків системи виміру.
Суть MPC-підходу становить наступна схема керування динамічними об'єктами за принципом зворотного зв'язку:
1. Розглядається деяка математична модель об'єкта, початковими умовами для якої служить його поточний стан. При заданому програмному керуванні виконується інтегрування рівнянь цієї моделі, що дає прогноз руху об'єкта на деякому кінцевому відрізку часу (обрії прогнозу).
2. Виконується оптимізація програмного керування, метою якого служить наближення регульованих змінних прогнозуючі моделі до відповідних сигналів, що задають, на обрії прогнозу. Оптимізація здійснюється з обліком усього комплексу обмежень, накладених на керуючі й регульовані змінні.
3. На кроці обчислень, що становить фіксовану малу частину обрію прогнозу, реалізується знайдене оптимальне керування й здійснюється вимір (або відновлення по обмірюваним змінним) фактичного стану об'єкта на кінець кроку.
4. Обрій прогнозу зрушується на крок вперед, і повторюються пункти 1 - 3 дані послідовності дій.
Наведена схема може бути об'єднана з попереднім проведенням ідентифікації рівнянь моделі, використовуваної для виконання прогнозу.[7]
Пакет прикладних програм Model Predictive Control Toolbox (MPC Tools) являє собою набір інструментальних засобів дослідження й проектування алгоритмів керування в дискретних і безперервних системах на основі пророкувань динаміки їхнього поводження. Сюди включені більше 50 спеціалізованих функцій для проектування, аналізу й моделювання динамічних систем, що використають керування із пророкуванням.
Види MPC:
1. Лінійні MPC:
1) Використовують лінійну модель:
 (32)
(32)
2) Квадратична оцінююча функція:
 (33)
(33)
3) Лінійні обмеження:
Hx + Gu < 0
4) Квадратична програма
2. Нелінійні MPC:
1) Використовують нелінійну модель:
x= f(x, u);
2) Оцінююча функція може бути неквадратичною:
F(x,u);
3) Нелінійні обмеження:
h(x,u) < 0;
4) Нелінійна програма. [2]
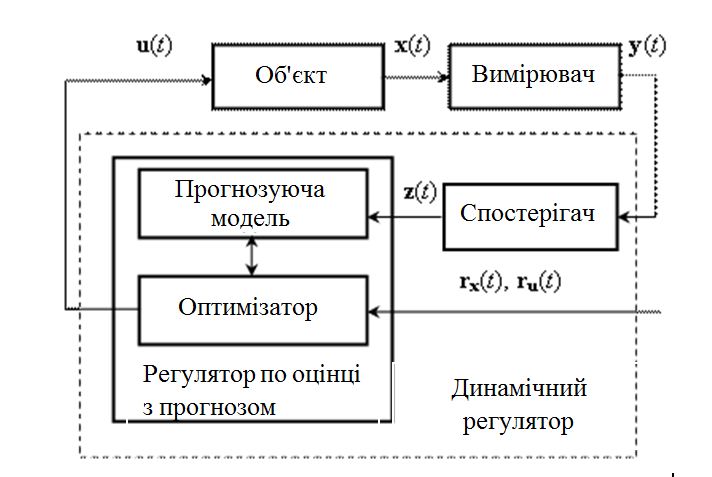
Рисунок 4.1 - Блок-схема керування із прогнозуванням
Загальна схема MPC складається з наступних дій:
1. Вимір або оцінювання вектора стану x(t) реального об'єкта.
2. Рішення оптимізаційного завдання для прогнозуючої моделі з початковою умовою x(t) стосовно:

3. Використання знайденої оптимальної функції як програмне керування на відрізку.
4. Заміна моменту часу t на момент t+1 і повторення операцій, зазначених на стадіях 1 - 3.[7]

Рисунок 4.2 - Базова структура MPC
Дата добавления: 2014-11-30; просмотров: 1286;