Отраслевой пример
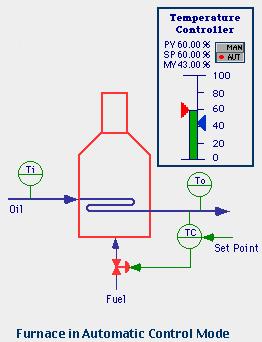
Рассмотрим печной агрегат, температура нефти на выходе из которого контролируется путем регулировки расхода топлива при помощи PI-контроллера. Допустим, что печной агрегат находится в неком стабильном состоянии.
В момент времени t увеличим уставку контроллера температуры на выходе. Это ведет к образованию отклонения. PI-контроллер увеличивает положение клапана регулировки расхода топлива, чтобы увеличить температуру на выходе. Поскольку печь имеет "мертвое" время и постоянную времени, температура на выходе остается неизменной в течение какого-то времени, а затем повышается со временем. PI-контроллер продолжает увеличивать положение клапана регулировки расхода топлива, пока температура на выходе не достигает его уставки.
В момент времени t1 происходит отклонение. Таким образом, вклад со стороны пропорционального действия отсутствует, а выход со стороны интегрального действия остается неизменным. Однако, в печь уже введена чрезмерная энергия, и следовательно, температура на выходе продолжает расти, превышая уставку. Точка, в которой контролируемая переменная пересекает уставку, часто называют точкой пересечения.
После точки пересечения отклонение становится отрицательным, и оба действия — пропорциональное и интегральное — начинают закрывать топливный клапан. В результате, температура на выходе достигает пика, а затем начинает уменьшаться. Расстояние между пиком и уставкой называется "выбросом". Температура на выходе снова возвращается к уровню своей уставки и может опуститься еще ниже.
Таким образом, температура на выходе продолжает колебаться вокруг уставки в течение некоторого времени, но в конце концов устанавливается на уровне уставки.
Интенсивность колебаний и время, необходимое для того, чтобы установиться на уровне уставки, зависят от значений параметров настройки контроллера и динамики процесса.
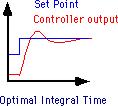
Если настройки параметров настройки контроллера верные, то колебания затухнут быстро, и контролируемая переменная достигнет уставки в течение короткого времени без установившейся ошибки.
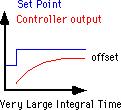
Если время интегрирования очень большое, то значительного вклада со стороны интегральной составляющей не будет, и PI-контроллер будет действовать как P-контроллер, оставляя установившуюся ошибку.
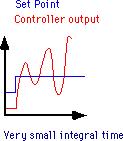
Если пропорциональное усиление выше своего оптимального значения, или если время интегрирования меньше своего оптимального значения, то интенсивность колебаний будет нарастать. Дальнейшее увеличение пропорционального усиления или уменьшение времени интегрирования приведет к нестабильному состоянию.
Колебания и нестабильность имеют большую вероятность возникновения процесса с большими постоянной времени и "мертвым" временем.
Соответственно, параметры настройки контроллера должны иметь верные значения для стабильной и приемлемой реакции. Используя оптимальные значения параметров настройки, можно обеспечить выход контролируемой переменной на уровень своей уставки за некоторое приемлемое время с более низкими колебаниями.
Сводная информация о P- и I-контроллере
Резюмируем информацию о работе P-контроллера и PI-контроллера.
Для P-контроллера:
- Установившаяся ошибка сохраняется, и ее невозможно устранить
- Установившуюся ошибку можно уменьшить путем увеличения пропорционального усиления
- Для многих процессов увеличение пропорционального усиления может привести к колебаниям реакции контролируемой переменной.
Для PI-контроллера:
- Устраняет установившуюся ошибку
- Реакцию контроллера можно ускорить с помощью большего пропорционального усиления или меньшего времени интегрирования
- Очень высокое пропорциональное усиление или очень короткое время интегрирования могут привести к большому выбросу и колебаниям
Колебания, вызванные PI-контроллером, можно ослабить, введя дифференциальную составляющую, о которой мы узнаем далее.
Дата добавления: 2014-12-02; просмотров: 1155;