PID-контроллер
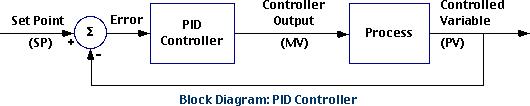
Контроллер, включающий в себя пропорциональный, интегральный и дифференциальный элементы, называется "PID-контроллер" и представляет собой наиболее широко используемый в отрасли тип.
С математической точки зрения PID-контроллер выражается как сумма пропорционального, интегрального и дифференциального элементов:

или

В системе Лапласа это выражается следующим образом:
Следует заметить, что пропорциональное усиление, KC, было включено в интегральную и дифференциальную составляющую.
Давайте резюмируем, что мы узнали на текущий момент о пропорциональном, интегральном и дифференциальном действиях.
- Говоря в целом, пропорциональное действие может быть приемлемым для систем первого порядка, но для систем высшего порядка оно сохраняет установившуюся ошибку. Установившуюся ошибку можно уменьшить за счет увеличения пропорционального усиления, однако, очень высокое пропорциональное усиление сделает контроллер нестабильным.
- Интегральное действие устраняет установившуюся ошибку, но реакция имеет колебательный характер. Более короткое время интегрирования ведет к усилению колебаний.

- Дифференциальное действие обеспечивает упреждающее действие управления. Оно снижает выброс, вызванный интегральным действием, и сводит колебания к минимуму.
- PID-контроллер с верными настройками, включая пропорциональное усиление, время интегрирования и время дифференцирования, способен управлять технологическим процессом за приемлемое время, стабильно и с меньшими колебаниями.
Дата добавления: 2014-12-02; просмотров: 1210;