Основные исторические этапы развития механики.
Возникновение и развития механики (mechane – сооружение, машина) как науки неразрывно связано с историей развития производительных сил общества, с уровнем производства и техники на каждом этапе этого развития.
В древние времена, когда запросы производства сводились главным образом к удовлетворению нужд строительной техники, начинает развиваться учение о так называемых простейших машинах (блок, ворот, рычаг, наклонная плоскость) и общее учение о равновесии тел (статика). Обоснование начал статики содержится уже в сочинениях одного из великих ученых древности Архимеда (287-212 г. до н.э.).
Развитие динамики начинается значительно позже. В 15-16 столетиях возникновение и рост в странах Западной и Центральной Европы буржуазных отношений послужили толчком к значительному подъему ремесел, торговли, мореплавания и военного дела, а также к важным астрономическим открытиям. Все это способствовало накоплению большого опытного материала, систематизация и обобщение которого привели в 17 столетии к открытию законов динамики. Главные заслуги в создании основ динамики принадлежат гениальным исследователям Галилео Галилею (1564-1642) и Исааку Ньютону (1643-1727).
В 18 в. начинается интенсивное развитие в механике аналитических методов, т.е. методов, основанных на применении дифференциального и интегрального исчислений.
Кинематика, как отдельный раздел механики, выделилась лишь в 19 в. под влиянием запросов развивающегося машиностроения. В настоящее время кинематика имеет и большое самостоятельное значение для изучения движения механизмов и машин.
Предмет статики
Статика - это раздел теоретической механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных тел, находящихся под действием сил, т.е. это раздел теоретической механики, в котором рассматриваются задачи на равновесие систем сил. Под равновесием понимается состояния покоя по отношению к другим телам, например к земле.
Материальное тело, размеры которого в рассматриваемых конкретных условиях можно не учитывать, называют материальной точкой.
Системой материальных точек (или механической системой) называется такая совокупность материальных точек, в которой положение и движение каждой точки зависят от положения и движения других точек этой системы.
Абсолютное твердое тело называется тело, расстояния между каждыми двумя точками которого остаются неизменными.
Сила – мера механического взаимодействия тел. Сила векторная величина, характеризуется тремя элементами: числовым значением (модулем), направлением и точкой приложения. Ед. измерения – ньютон,  , 1кН (килоньютон)= 103 Н.
, 1кН (килоньютон)= 103 Н.
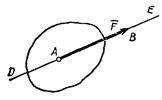 Силу, как и все другие векторные величины, будем обозначать буквой с чертой над нею (например,
Силу, как и все другие векторные величины, будем обозначать буквой с чертой над нею (например,  ), а модуль силы — символом
), а модуль силы — символом  = F, точка А является точкой приложения силы. Прямая DE, вдоль которой направлена сила, называется линией действия силы.
= F, точка А является точкой приложения силы. Прямая DE, вдоль которой направлена сила, называется линией действия силы.
Система сил называется совокупность нескольких сил, действующих на данное тело.
Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными.
Сила, эквивалентная некоторой системе сил, называется равнодействующей данной системы сил.
Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой.
Силы, действующие на данное тело (или систему тел), можно разделить на внешние и внутренние. Внешними называются силы, которые действуют на это тело (или на тела системы) со стороны других тел, а внутренними — силы, с которыми части данного тела действуют друг на друга.
Дата добавления: 2014-12-22; просмотров: 5167;