Г) Мс и М - линейные функции w.
Полученные в п.п. б) и в) результаты можно распространить на случай, когда М и Мс - линейные функции скорости.
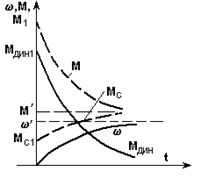
Рассмотрим эту возможность на простом примере. Пусть требуется рассчитать переходный процесс пуска привода, если характеристики двигателя и нагрузки заданы, как показано на рис. 5.10,а пунктиром.

а) б)
Рис. 5.10. Механические характеристики (а) и кривые переходных процессов (б)
при линейных зависимостях М(w) и Мс(w)
Заменим эти характеристики одной - зависимостью динамического момента Мдин = М - Мс от скорости. Эта зависимость линейна, так как линейны М(w) и Мс(w) - сплошная линия на рис. 5.10,а. Теперь, воспользовавшись полученными ранее результатами, можно получить зависимости w(t) и Мдин(t). При этом wнач = 0, wкон = w¢, Мдин нач = Мдин1, Мдин кон = 0,  ; кривые построены на рис. 5.10,б сплошными линиями. Если необходимо, можно построить и графики М(t) и Мс(t), так как известны начальные и конечные величины (рис. 5.10,а) и определена Тм. Эти графики показаны на рис. 5.10,б пунктиром.
; кривые построены на рис. 5.10,б сплошными линиями. Если необходимо, можно построить и графики М(t) и Мс(t), так как известны начальные и конечные величины (рис. 5.10,а) и определена Тм. Эти графики показаны на рис. 5.10,б пунктиром.
5.3. Переходные процессы при L=0 и “медленных” изменениях воздействующего фактора
К задачам данной группы ранее были отнесены переходные процессы в системе преобразователь - двигатель (П-Д). Фактор, вызывающий переходный процесс, изменяется не мгновенно (темп его изменения соизмерим с темпом изменения скорости привода в переходном процессе); учитывается только механическая инерция в приводе (J), индуктивности в цепях двигателя малы или не проявляются.
Типичные структуры системы П-Д и соответствующие механические характеристики показаны на рис. 5.11 и 5.12.

а) б)
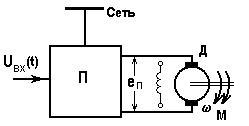
Рис. 5.11. Система ПН-ДПТ и ее механические характеристики
Роль преобразователя П в схеме на рис. 5.11, как отмечалось, может играть генератор (система Г-Д) или тиристорный преобразователь (ТП-Д). Фактор, вызывающий переходный процесс в этих системах, - изменение входного сигнала uвх, приводящее к изменению ЭДС преобразователя еп.
а) б)
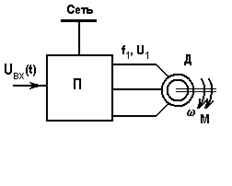
Рис. 5.12. Система ПЧ-АД и ее механические характеристики
Роль преобразователя П в схеме на рис. 5.12 играет статический преобразователь частоты. Фактор, вызывающий переходный процесс в этих системах, - изменение входного сигнала uвх, приводящее к изменению частоты и напряжения на выходе преобразователя.
Как и прежде, целью изучения переходных процессов в системе П-Д будет определение зависимостей w(t), М(t) и иногда i(t) при известных условиях переходного процесса и параметрах привода.
Введем ряд условий и допущений.
1. Механические характеристики привода w(М) известны, линейны (по крайней мере, на рабочих участках) и параллельны друг другу, то есть выражаются уравнением (5.4):
где  - жесткость характеристик.
- жесткость характеристик.
2. Известны или могут быть определены зависимости еп(t) или f1(t), то есть закон изменения во времени фактора, вызывающего переходный процесс. Так как еп или f1 однозначно связаны со скоростью идеального холостого хода привода w0
 - для схемы на рис. 5.11,
- для схемы на рис. 5.11,
 - для схемы на рис. 5.12,
- для схемы на рис. 5.12,
то известен закон изменения во времени w0.
3. Известно начальное (wнач, Мнач) и конечное (wкон, Мкон) состояние привода, момент инерции J и момент сопротивления Мс = const.
4. Преобразователь П обладает двусторонней проводимостью, то есть характеристики w(М) могут располагаться во всех квадрантах плоскости w, М.
Рассмотрим прежде всего качественные отличия переходных процессов в системе П-Д от изученных ранее случаев, когда еп или f1 изменялись мгновенно, то есть мгновенно устанавливалась соответствующая новая механическая характеристика, а изменение скорости w и момента М в переходном процессе происходило согласно именно этой характеристике. Переходный процесс определялся статической механической характеристикой привода.
В рассматриваемых далее задачах еп или f1 изменяются, как указывалось, не мгновенно, то есть переход привода с одной характеристики на другую происходит постепенно, одновременно с изменением скорости, в результате чего соответствие между скоростью w и моментом М в каждый момент времени определяется не статической механической характеристикой, а другой, отличной от нее характеристикой, которую мы далее будем называть динамической механической характеристикой или просто динамической характеристикой.
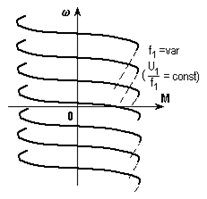
В качестве примера на рис. 5.13 показана статическая характеристика асинхронного двигателя при номинальной частоте 1, по которой будет происходить пуск при мгновенном приложении к двигателю напряжения такой частоты, и динамическая характеристика 2, соответствующая пуску двигателя путем плавного изменения частоты от нуля до номинальной по некоторому закону.
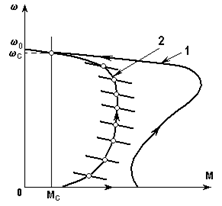
Рис. 5.13. Статическая 1 и динамическая 2 механические характеристики
Динамические характеристики определяются темпом изменения фактора, вызывающего переходный процесс, и параметрами привода, могут очень сильно отличаться от статических характеристик и даже иметь совсем другую форму.
Легко обнаружить связь зависимостей w(t) и М(t) с динамической характеристикой привода: исключив время t из уравнений w(t) и М(t), мы получим динамическую характеристику.
Дата добавления: 2019-10-16; просмотров: 746;