А) Уравнения, описывающие переходные процессы.
Из уравнения механической характеристики (5.4) получим:
М = ½b½w0 - ½b½w. (5.5,а)
Подставив (5.5,а) в уравнение движения (5.1), после элементарных преобразований будем иметь:
 (5.13)
(5.13)
Коэффициент при производной  как и раньше, - электромеханическая постоянная времени Тм. Правая часть уравнения представляет собою скорость wс, соответствующую моменту сопротивления Мс, однако, в рассматриваемом случае w0 , а значит и wс не постоянные величины, а известные функции времени w0(t) и wc(t). Таким образом, уравнение (5.13) имеет вид:
как и раньше, - электромеханическая постоянная времени Тм. Правая часть уравнения представляет собою скорость wс, соответствующую моменту сопротивления Мс, однако, в рассматриваемом случае w0 , а значит и wс не постоянные величины, а известные функции времени w0(t) и wc(t). Таким образом, уравнение (5.13) имеет вид:
 . (5.14)
. (5.14)
Решение этого дифференциального уравнения определит искомую зависимость w(t).
Для получения зависимости М(t) удобно воспользоваться непосредственно уравнением движения (5.1), подставив в него производную найденной функции w(t):
 (5.15)
(5.15)
Правая часть уравнения (5.14), вообще говоря, может иметь любой вид. Закон w0(t) в случае безынерционного преобразователя формируется на его входе; при инерционном преобразователе закон w0(t) связан со свойствами преобразователя. В ряде случаев закон w0(t) формируется таким образом, чтобы получить требуемый закон w(t).
б) Уравнение переходных процессов при линейном законе wс(t)
Получим решение уравнения (5.14) для одного важного вида функции wс(t) - для линейного изменения wс во времени:
wс(t) = а + kt. (5.16)
Такой закон может быть сформирован при безынерционном преобразователе с помощью задатчика интенсивности.
Мы используем здесь общее уравнение прямой, не накладывая пока никаких ограничений на величины а и k с тем, чтобы, рассматривая частные случаи, можно было пользоваться полученным общим результатом.
Уравнение (5.14) с учетом (5.16) имеем вид:
 (5.17)
(5.17)
Решение будем искать, как и прежде, в виде суммы свободной wсв и принужденной wпр составляющих:
w = wсв + wпр . (*)
Свободная составляющая, то есть решение однородного уравнения, полученного из (5.17) имеет вид:
Принужденную составляющую будем искать, учитывая (5.16), в виде:
wпр = В + kt,
так как в установившемся режиме скорость будет линейно изменяться во времени. Подставив wпр в (5.17) получим:
В + kt + kTм = a + kt
или
B = a - kT м.
Подставим теперь wсв иwпр в (*):
Постоянную А найдем, используя начальные условия: при t = 0 w = wнач:
wнач = А + а - kTм,
откуда
А = wнач - а + kTм
Окончательно будем иметь:
 . (5.18)
. (5.18)
Перейдем теперь к рассмотрению некоторых конкретных переходных процессов в системе П-Д.
В) Пуск вхолостую.
Будем полагать, что закон изменения во времени фактора, вызывающего переходный процесс, еп или f1 или в общем случае w0 имеет вид, представленный на рис. 5.14 справа вверху. Так как Мс = 0 (пуск вхолостую), то wс = (t) будет совпадать с w0(t) - см. уравнение (5.13), т.е. а = 0 и
где e - ускорение, характеризующее темп изменения w0;
при 0 < t < t1 wс(t) = et;
при t > t1 wс(t) =w01 = сonst.
Излом функции wс(t) при t = t1 свидетельствует о том что переходный процесс состоит из двух этапов, и его необходимо рассчитать отдельно для каждого участка.
I этап (0 < t < t1).
Приняв, что при t = 0 wнач = 0 и подставив в (5.18) а = 0, k = e, получим
 (5.19)
(5.19)
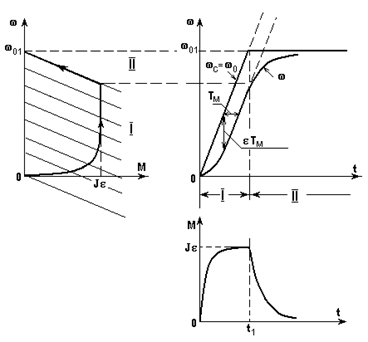
Рис. 5.14. Механические характеристики и графики переходного процесса при пуске вхолостую с w0(t) = et
Воспользовавшись уравнением (5.15), найдем закон изменения момента во времени:
 (5.20)
(5.20)
Проанализируем полученные уравнения.
Ускорение привода определится как
и при t = 0  Этот результат очевиден: при t = 0 wс = w0 = 0 т.е. еп = 0 или f1 = 0, привод не развивает момента и в соответствии с уравнением движения (5.1)
Этот результат очевиден: при t = 0 wс = w0 = 0 т.е. еп = 0 или f1 = 0, привод не развивает момента и в соответствии с уравнением движения (5.1)  и
и  .
.
При t > 3Тм  , т.е. скорость изменяется в том же темпе, что и фактор, вызывающий переходный процесс. Из уравнения (5.19) следует, что при t > 3Тм
, т.е. скорость изменяется в том же темпе, что и фактор, вызывающий переходный процесс. Из уравнения (5.19) следует, что при t > 3Тм
w = e(t - Тм) = wс(t) -eТм . (5.19,а)
Графики wс(t) и w(t) представлены на рис. 5.14. Кривая w(t) сдвинута вправо относительно кривой wс(t) на величину Тм; в каждый момент времени при t > 3Тм разница между wс и w составляет eТм.
Момент в соответствии с (5.20) возрастает по экспоненциальному закону (см. рис. 5.14) и при t > 3Тм достигает величины
Mмакс = Je. (5.20,а)
Это соотношение позволяет оценить допустимую величину e. Действительно, если считать, что в переходном процессе Ммакс = Мдоп, то
В частности, можно найти минимальное время пуска привода при котором момент не превысит допустимого значения:
Если положить, что Мдоп = 2 Мн, а  , что справедливо для нормальной электрической машины средней мощности, то получим
, что справедливо для нормальной электрической машины средней мощности, то получим
II этап (t > t1).
На II этапе wс =w01 , а значит, и еп или f1 имеют постоянную величину. Переходный процесс в этом случае ничем не отличается от рассмотренных ранее переходных процессов, отнесенных к первой группе задач. Если отсчитывать время от t1, (точка 0’), то скорость w и момент М будут изменяться в соответствии с уравнением (5.10); в качестве хнач следует принять значения w и М в момент времени t1. Если t1< 3Тм, начальные значения должны быть лпределены по (5.19) и (5.20) при подстановке в эти уравнения t = t1.
В качестве хкон, очевидно, следует взять w01 и 0.
Графики w(t) и M(t) на II этапе показаны на рис. 5.14. Там же слева приведена динамическая механическая характеристка для случая пуска вхолостую.
Все рассмотренные выше величины и зависимости имеют очевидный физический смысл для системы П-Д с двигателем постоянного тока. Действительно,

т.е. кривая w0(t) представляет собою в некотором масштабе закон изменения во времени еп, а кривая w(t) - закон изменения е в том же масштабе. Разность этих величин в соответствии с вторым законом Кирхгофа определит ток, протекающий в якорной цепи:
а значит, и момент, развиваемый двигателем
M(t) = ci(t).
Дата добавления: 2019-10-16; просмотров: 1281;