В цепи фазного ротора R.
Способ применим только для асинхронных двигателей с фазным ротором.
Точка А - устойчивая работа электродвигателя и механизма на естественной характеристике 1. Здесь вращающий момент двигателя М равен статическому моменту сопротивления механизма М Ст (т.е. М = М Ст ).
Частота вращения ротора при этом равна ω А .
. 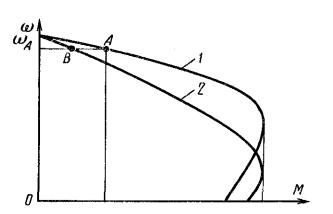
Если в цепь фазного ротора ввести добавочное сопротивления R , то ясно что
в первый момент времени ток ротора уменьшится ( І 2 = Е 2S / Z 2 ) и соответственно
уменьшается вращающий момент двигателя
( М = к Ф І '2 Соs ψ 2 )
Равновесие моментов нарушается и вращающий момент двигателя оказывается меньше момента сопротивления механизма. Двигатель переходит на работу по искусственной характеристике 2 (точка В).
Под действием избыточного тормозного момента механизма частота вращения
асинхронного двигателя начнет падать. Но если ротор начинает затормаживаться, то
частота пересечения проводников обмотки ротора магнитным полем статора начнет увеличиваться . Это приводит к увеличению скольжения и ЭДС ротора.
Увеличение ЭДС ротора при уменьшении угловой скорости вызовет увеличение
тока ротора и вращающий момент двигателя снова начнет увеличиваться.
Снижение частоты вращения ротора АЭД будет продолжаться до тех пор, пока вращающий момент двигателя не возрастет настолько, что он станет равным моменту сопротивления механизма и снова наступит равновесие моментов (т.е. М = М Ст ), но уже в точке С при меньшей угловой скорости ω С .
Плавность регулирования зависит от числа ступеней регулировочных резисторов,
поэтому очень часто их совмещают с пусковыми резисторами и получают пуско-регулировочный реостат.
Недостатком данного способа регулирования являются значительные потери энергии на регулирововчных реостатах. Однако из-за своей простоты и плавности способ находит применение в ЭП кратковременного режима работы (например, в ЭП
якорно-швартовных устройств).
15.2. Регулирование изменением частоты тока питающей сети f.
Ранее данный способ регулирования практически не применялся, т.к. для каждого
такого двигателя был бы нужен отдельный синхронный генератор, частоту тока которого можно было бы изменять. Иногда способ применяли в некоторых схемах ГЭУ.
В настоящее время это наиболее перспективный способ. Но изменяющуюся частоту тока здесь получают не от отдельного синхронного генератора, а от тиристорных преобразователей частоты. Они будут рассматриваться позже.
Дата добавления: 2017-03-29; просмотров: 573;