Лекция 9. Динамика твердого тела. 3 страница
Из формулы (5.13) первая космическая скорость равна
 ,
,
а из формулы (5.14) вторая космическая скорость равна

Траектории планет Солнечной системы. Законы Кеплера.
Если принять за неподвижный центр притяжения Солнце, то гравитационная сила притяжение записывается так:
 (5.12)
(5.12)
где постоянная Гаусса Солнца  записывается через гравитационную постоянную Солнечной системы G и массу Солнца
записывается через гравитационную постоянную Солнечной системы G и массу Солнца  . Траектории планет – эллипсы, для которых Солнце находится в фокусе эллипса. Угол φ отсчитывается от перигелия – минимального расстояния
. Траектории планет – эллипсы, для которых Солнце находится в фокусе эллипса. Угол φ отсчитывается от перигелия – минимального расстояния  планет от Солнца. Это первый закон Кеплера.
планет от Солнца. Это первый закон Кеплера.
Из (5.1) и (5.2) вытекает второй закон Кеплера, выраженный через секторную скорость 
 (5.13)
(5.13)
Здесь S(t) - площадь, заметаемая вектором  за время t .
за время t .

Секторная скорость планет постоянна.
Период τ обращения планеты – время полного прохождения траектории - находится из условия (a, b есть большая и малая полуоси эллипса соответственно)
Поэтому третий закон Кеплера выражает общее свойство для всех планет Солнечной системы:
 (5.14)
(5.14)
то есть отношение квадратов периодов планет τ2 к кубам их больших полуосей a3 есть постоянная величина для всех планет солнечной системы.
Доказательство.
Решение задач о движении планет использует следующие соотношения между параметрами эллипса:
 (5.15)
(5.15)
Лекция 6.Модель «система материальных точек».
Система материальных точек есть набор конечного числа точек N, с постоянными конечными массами, взаимодействующих между собой, а также с другими телами, не включенными в систему. Мерами взаимодействий являются главный вектор  внешних силсистемы и главный вектор
внешних силсистемы и главный вектор  внутренних сил взаимодействий системы:
внутренних сил взаимодействий системы:
 (6.1)
(6.1)
Здесь  есть главный вектор всех внешних сил взаимодействий точки с номером k, а
есть главный вектор всех внешних сил взаимодействий точки с номером k, а  есть главный вектор всех внутренних сил взаимодействий этой точки со всеми остальными точками системы.
есть главный вектор всех внутренних сил взаимодействий этой точки со всеми остальными точками системы.
Дифференциальные уравнения движения системы точек.
Это есть совокупность дифференциальных уравнений движения всех точек:
 (6.2)
(6.2)
Система (6.2), записанная в выбранном базисе, имеет 3N скалярных уравнений, в которых число скалярных неизвестных (движение, силы) больше, чем число уравнений. Система (6.2) иногда незамкнута.
Введем новые понятия для системы точек, и с их помощью опишем некоторые свойства движения и взаимодействия точек системы.
Определения.
Центр масс системы точек есть точка С, определяемая массами точек  и их векторами положения
и их векторами положения 
 (6.3)
(6.3)
При движении системы  центр масс имеет скорость
центр масс имеет скорость  и ускорение
и ускорение  :
:
 (6.4)
(6.4)
Здесь  называют массой системы.
называют массой системы.
Теоремы динамики системы материальных точек.
Теорема о движении центра масс:
 (6.5)
(6.5)
Определения.
Импульс системы:
 (6.6)
(6.6)
Момент импульса системы относительно неподвижной точки О (оси Oz):
 (6.7)
(6.7)
Кинетическая энергия системы точек:
 (6.8)
(6.8)
Теорема об изменении импульса:
 (6.9)
(6.9)
Теорема об изменении момента импульса:
 (6.10)
(6.10)
Здесь  есть главный момент всех внешних сил системы.
есть главный момент всех внешних сил системы.
Теорема об изменении кинетической энергии:
 (6.11)
(6.11)
Законы сохранения.
Закон сохранения вектора импульса системы или его проекции на ось.
Если  то
то  (6.12)
(6.12)
Если  то
то 
Закон сохранения вектора положения центра масс или его проекции на ось Оx :
Если  , то
, то 
Если  , то
, то  (6.13)
(6.13)
Закон сохранения вектора момента импульса или его проекции на ось:
Если  то
то  (6.14)
(6.14)
Закон сохранения механической энергии: если все работающие силы потенциальны, то
 (6.15)
(6.15)
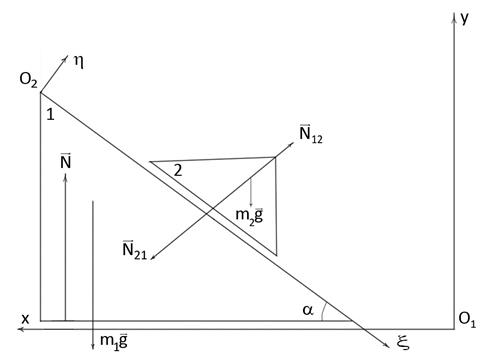
Задача 6.1. Призма 1 с массой  может двигаться по гладкой горизонтальной поверхности. Гладкая призма 2 с массой
может двигаться по гладкой горизонтальной поверхности. Гладкая призма 2 с массой  скользит по гладкой боковой поверхности призмы 1 , образующей угол α с горизонтом. Найти общий класс движений системы двух призм, а также силы взаимодействий призм между собой и с горизонтальной плоскостью. Найти также величину перемещения
скользит по гладкой боковой поверхности призмы 1 , образующей угол α с горизонтом. Найти общий класс движений системы двух призм, а также силы взаимодействий призм между собой и с горизонтальной плоскостью. Найти также величину перемещения  призмы 1 за то время, когда призма 2 переместится вдоль боковой поверхности призмы 1 на расстояние
призмы 1 за то время, когда призма 2 переместится вдоль боковой поверхности призмы 1 на расстояние  . В начальный момент система призм покоилась.
. В начальный момент система призм покоилась.
Решение 1 в декартовых координатах.
Уравнения связей и число независимых геометрических параметров, определяющих положение системы двух точек 1 и 2.
Шесть декартовых координат системы связаны четырьмя уравнениями связей:
 (6.1.1)
(6.1.1)
Cистема двух точек имеет два независимых параметра. Пусть это будут x1 и x2 .
Идеальность гладких поверхностей определяет внешнюю нормальную силу реакции  и внутренние действие
и внутренние действие  и противодействие
и противодействие 

 внутреннего взаимодействия двух призм. Силы тяжести
внутреннего взаимодействия двух призм. Силы тяжести  есть внешние активные силы (притяжения к Земле).
есть внешние активные силы (притяжения к Земле).
Дифференциальные уравнения движения системы (6.2) в векторной форме:

Дифференциальные уравнения движения системы в декартовых координатах Оxy, с учетом уравнения связи  :
:
 (6.1.2)
(6.1.2)
Четыре уравнения имеют четыре неизвестных  .
.
Решение этой системы имеет вид:


Чтобы найти связь  и
и  , используем закон сохранения положения центра масс системы (6.13) в проекции на ось 0x:
, используем закон сохранения положения центра масс системы (6.13) в проекции на ось 0x:

Решение 2. Применим к системе двух точек теорему о движении центра масс а затем напишем уравнение движения точки 2.
Уравнения связей (6.1.1) и аксиомы сил те же, что в первом решении. Используем далее независимые параметры  и
и  , где
, где

Теорема о движении центра масс системы (6.5) в проекции на оси Ox и Oy имеет вид:

Уравнение движения призмы 2 спроектируем на неподвижные оси  и
и  , перпендикулярную и параллельную наклонной плоскости призмы 2 соответственно:
, перпендикулярную и параллельную наклонной плоскости призмы 2 соответственно:

Решение четырех последних уравнений с четырьмя неизвестными дает те же результаты, однако уравнения решаются проще.

Замечание. Если требуется найти только движение системы, то достаточно двух уравнений

Ответ: движение системы в независимых параметрах  и
и  :
:
Движение системы в декартовых координатах:

Задача двух тел.
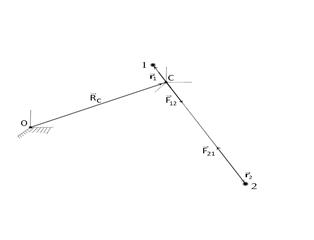
Два твердых тела с массами m1 и m2 взаимодействуют между собой, причем модуль силы взаимодействия F(r) зависит от расстояния между телами r. Определить движение тел и их траектории, моделируя тела материальными точками.
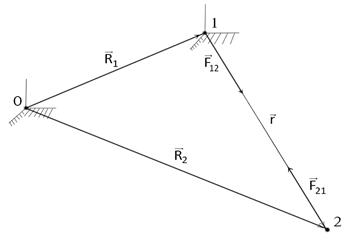
Решим задачу, предполагая, что существует инерциальная система отсчета, в которой есть декартова система координат Oxyz. Пусть  и
и  определяют в этой системе положения точек 1 и 2 соответственно. Так как учитывается только взаимодействие точек между собой, то, обозначая
определяют в этой системе положения точек 1 и 2 соответственно. Так как учитывается только взаимодействие точек между собой, то, обозначая  силу действия точки 1 на точку 2, а силу
силу действия точки 1 на точку 2, а силу  противодействия точки 2 на точку 1, дифференциальные уравнения движения системы запишем в виде:
противодействия точки 2 на точку 1, дифференциальные уравнения движения системы запишем в виде:

Система двух точек есть замкнутая система  и от начальных условий, покоится или движется равномерно и прямолинейно, то есть его движение известно.
и от начальных условий, покоится или движется равномерно и прямолинейно, то есть его движение известно.
Теорема. Решение задачи двух взаимодействующих точек в поле сил взаимодействия, зависящих от расстояния между ними, сводится к решению задачи движения одной точки с массой  в том же поле центральной силы
в том же поле центральной силы 
Доказательство. Умножая второе уравнение на  , а первое уравнение - на
, а первое уравнение - на  ,и вычитая из второго уравнения первое, получим следующее уравнение:
,и вычитая из второго уравнения первое, получим следующее уравнение:
 (6.16)
(6.16)
Это уравнение имеет такой же вид, а значит и такое же по форме решение, как уравнение движения точки 2 по отношению неподвижной точке 1, (5.3) - (5.9):
Достаточно только в решении последнего уравнения заменить массу на приведенную массу  . Окончательно, движение точек 1 и 2 определяется уравнениями
. Окончательно, движение точек 1 и 2 определяется уравнениями

в виде:

Движение двух взаимодействующих точек в гравитационном поле.
В гравитационном поле (5.10) уравнение движения точки1 по отношению к точке 2 имеет вид:
 (6.17)
(6.17)
Решение этого уравнения есть движение точки 2 относительно подвижного центра притяжения 1, постоянная Гаусса которого равна  (при неподвижном центре 1 она была равна
(при неподвижном центре 1 она была равна  ) Траектории обеих точек есть конические сечения с фокусом, расположенным в точке 1. Их геометрические параметры вычисляются так же, как в задаче с заменой массы на. Заметим, что все векторы записаны в одном и том же базисе инерциальной системы координат.
) Траектории обеих точек есть конические сечения с фокусом, расположенным в точке 1. Их геометрические параметры вычисляются так же, как в задаче с заменой массы на. Заметим, что все векторы записаны в одном и том же базисе инерциальной системы координат.
Применение уравнения (6.17) к солнечной системе с заменой массы  на массу
на массу  приводит к уточненной формулировке законов Кеплера, с учетом движения Солнца. Они имеют ту же формулировку, как и в (5.13), (5.15), (5.17), только постоянную Гаусса
приводит к уточненной формулировке законов Кеплера, с учетом движения Солнца. Они имеют ту же формулировку, как и в (5.13), (5.15), (5.17), только постоянную Гаусса  в них необходимо заменить на
в них необходимо заменить на  где
где  есть масса планеты. Траектории планет есть эллипсы, фокусы траекторий планет совпадают с Солнцем.
есть масса планеты. Траектории планет есть эллипсы, фокусы траекторий планет совпадают с Солнцем.
Движение двух взаимодействующих точек в осях Кенига. Так как базис осей Кенига совпадает с базисом исходной инерциальной системы координат, а центр масс С движется равномерно и прямолинейно, то система координат Кенига с началом в центре масс инерциальна.
По отношению к осям Кенига уравнения движения двух точек запишутся в виде:
 (6.18)
(6.18)
Здесь  и
и  определяют движение точек 1 и 2 по отношению к системе координат Кенига, при этом
определяют движение точек 1 и 2 по отношению к системе координат Кенига, при этом
Умножая второе уравнение (6.18) на  , а первое - на
, а первое - на  и вычитая из второго уравнения первое, снова получим уравнение. После его решения движение точек в осях Кенига найдем из определения центра масс
и вычитая из второго уравнения первое, снова получим уравнение. После его решения движение точек в осях Кенига найдем из определения центра масс  по формулам:
по формулам:

Лекция 7.Модель «абсолютно твердое тело».
Движение абсолютно твердого тела.
По определению, расстояния между любыми двумя точками твердого тела не меняются, когда тело движется.
Пусть в теле элементарная масса  , занимает объём
, занимает объём  . Массовая плотность
. Массовая плотность  - масса единицы объёма, - есть
- масса единицы объёма, - есть  .
.
Выберем в теле систему координат  для индивидуализации положения массы
для индивидуализации положения массы  в теле вектором
в теле вектором 
При движении твердого тела по отношению к неподвижной системе координат  вектор
вектор  вращается вместе с телом, и его запись в неподвижном базисе производится с помощью ортогональной матрицы вращения
вращается вместе с телом, и его запись в неподвижном базисе производится с помощью ортогональной матрицы вращения  , сохраняющей расстояние между точками тела и ориентацию подвижного базиса. В неподвижном базисе вектор
, сохраняющей расстояние между точками тела и ориентацию подвижного базиса. В неподвижном базисе вектор  обозначим
обозначим  :
:
 (7.1)
(7.1)
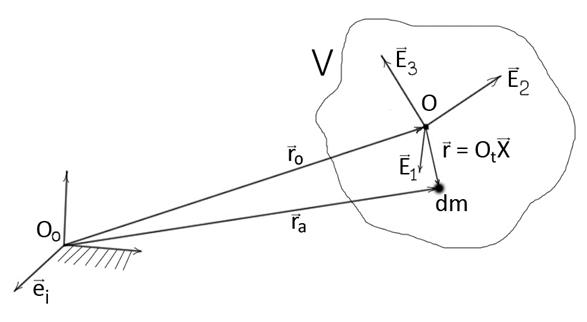
Движение твердого тела есть движение всех ее точек. Для любой точки тела определим ее движение в неподвижной системе координат как сумму двух векторов:  и
и  , определяющих соответственно поступательное и вращательное движение как составляющие абсолютного движения твердого тела:
, определяющих соответственно поступательное и вращательное движение как составляющие абсолютного движения твердого тела:
 (7.2)
(7.2)
Здесь  есть ортогональная матрица перехода всех векторов, определенных в подвижном базисе, к неподвижному базису. Её определитель равен +1. Для таких матриц
есть ортогональная матрица перехода всех векторов, определенных в подвижном базисе, к неподвижному базису. Её определитель равен +1. Для таких матриц
 (7.2)
(7.2)
обратная матрица  равна транспонированной матрице
равна транспонированной матрице  :
: 
Задать движение твердого тела значит задать поступательную часть движения тремя координатами вектора полюса и тремя независимыми элементами матрицы вращения. Таким образом, произвольное движение задается 6 независимыми параметрами, то есть имеет 6 степеней свободы.
Рассмотрим различные виды движений твердого тела и их уравнения связей, уменьшающие его число степеней свободы.
Поступательное движение. Имеет 3 степени свободы из шести, так как элементы матрицы вращений постоянны, а движение задается
Сферическое движение (вращение вокруг неподвижной точки О).
Вращение тела вокруг неподвижной оси. В теле имеется две неподвижные точки. Тогда все точки оси (Оz) неподвижны. Нет поступательного движения, а вращательное движение задается одним параметром – углом поворота подвижных векторов базиса и вокруг неподвижной оси Оz .
Ниже представим ограничения (связи) для других видов движения твердого тела.
Скорости точек твердого тела. Угловая скорость тела.
Скорость любой точки тела определим в неподвижном базисе:
 (7.3)
(7.3)
Матрица At есть антисимметричная матрица, что доказывается с помощью (7.2):

Тогда из (7.3) получим
 (7.4)
(7.4)
Вектор  можно представить следующим образом:
можно представить следующим образом:

так как

где три различных элемента матрицы  , по определению, образуют вектор угловой скорости твердого тела:
, по определению, образуют вектор угловой скорости твердого тела:

Тогда скорость точки тела вычисляется как векторная сумма скорости поступательного движения  с выбранным полюсом О и скорости вращательного движения
с выбранным полюсом О и скорости вращательного движения  по отношению к полюсу :
по отношению к полюсу :
 (7.5)
(7.5)
Вектор угловой скорости  не зависит от выбора полюса О и определяется только матрицей вращения
не зависит от выбора полюса О и определяется только матрицей вращения  .
.
Из (7.5) следует связь скоростей любых двух точек А и В тела:

Итак: проекции скоростей любых двух точек твердого тела на направление вектора  , соединяющего точки, равны.
, соединяющего точки, равны.
Кинематика частных движений твердого тела.
Вращение тела вокруг неподвижной оси. Существуют хотя бы две точки тела, которые имеют нулевые скорости для любого момента времени. Тогда неподвижны в теле все точки, лежащие на оси, проходящей через эти неподвижные точки.
Возьмем одну неподвижную точку за полюс О, а ось Оz проведем через другую неподвижную точку. Будем говорить, что твердое тело вращается вокруг неподвижной оси Оz.
В матрице вращения  и матрице
и матрице  есть угол
есть угол  вращения вокруг оси Оz подвижного базиса по отношению к неподвижному базису:
вращения вокруг оси Оz подвижного базиса по отношению к неподвижному базису:

откуда вектор угловой скорости  имеет в неподвижном базисе одну ненулевую компоненту
имеет в неподвижном базисе одну ненулевую компоненту  :
:
 (7.6)
(7.6)
Во вращении твердого тела вокруг неподвижной оси вектор угловой скорости параллелен оси вращения  .
.
По (7.5) скорости точек тела перпендикулярны к оси вращения и к вектору  . Точки тела движутся по окружностям с радиусами R и имеют величину
. Точки тела движутся по окружностям с радиусами R и имеют величину 

4. Плоское движение твердого тела. Скорость полюса  расположена в неподвижной плоскости
расположена в неподвижной плоскости  а угловая скорость перпендикулярна этой плоскости
а угловая скорость перпендикулярна этой плоскости  Плоское движение есть композиция поступательного и вращательного движений.
Плоское движение есть композиция поступательного и вращательного движений.
Для двух точек А и В плоской фигуры скорости этих точек лежат в плоскости фигуры, а угловая скорость ей перпендикулярна.
 (7.7)
(7.7)
Плоское движение имеет три степени свободы. Движение определяется уравнениями:

Для непоступательного плоского движения твердого тела в любом положении тела существует точка Р плоской фигуры ( или ее продолжения), скорость которой равна нулю. Эту точку Р называют мгновенный центр скоростей плоской фигуры. Взяв её за полюс, из (7.7) получим, что скорость любой точки А плоской фигуры перпендикулярна вектору РА, соединяющего точку с мгновенным центром скоростей.
Дата добавления: 2019-07-26; просмотров: 400;