Использование безразмерной величины . 3 страница
Для большинства шин все-таки более характерна другая организация децентрализованного арбитража. Такие схемы предполагают наличие в составе шины группы арбитражных линий, организованных по схеме «монтажного ИЛИ». Это позволяет любому ведущему видеть сигналы, выставленные остальными устройствами. Каждому ведущему присваивается уникальный номер, совпадающий с кодом уровня приоритета данного ведущего. Запрашивающие шину устройства выдают на арбитражные линии свой номер. Каждый из запросивших ведущих, обнаружив на арбитражных линиях номер устройства с более высоким приоритетом, снимает с этих линий младшие биты своего номера. В конце концов на арбитражных линиях остается только номер устройства, обладающего наиболее высоким приоритетом. Победителем в процедуре арбитража становится ведущий, опознавший на арбитражных линиях свой номер. Подобная схема известна также как распределенный арбитраж с самостоятельным выбором, поскольку ведущий сам определяет, стал ли он победителем в арбитраже, то есть выбирает себя самостоятельно.
Идея подобного арбитража была предложена М. Таубом (Matthew Taub) в 1975 году. В алгоритме Тауба под арбитраж выделяются две группы сигнальных линий, доступные всем устройствам на шине. Устройства подключаются к этим линиям по схеме «монтажного ИЛИ». Первая группа служит для передачи сигналов синхронизации и управления. Вторую группу линий условно назовем шиной приоритета и обозначим В. В зависимости от принятого числа уровней приоритета эта группа может содержать от 4 до 7 линий. Каждому потенциальному ведущему назначается уникальный уровень приоритета. Приоритет Р представлен k-разрядным двоичным кодом. Каждому разряду кода приоритета соответствует линия в шине В. Ведущие, претендующие на управление шиной, выдают на шину В свои коды приоритета Р. Дальнейшее поведение ведущих определяется следующим правилом: если i-й разряд кода приоритета равен 0 (Рi = 0), а на i-й линии шины В в данный момент присутствует единица (Bi = 1), то ведущий обнуляет в выставляемом коде все младшие разряды, от 0-го до i-го. В результате такой процедуры на шине В остается код наивысшего из выставленных приоритетов. Устройство, распознавшее на шине свой код приоритета, считается выигравшим арбитраж. После завершения своей транзакции выигравшее устройство снимает с шины В свой код приоритета, при этом ситуация на линиях В меняется. Ведущие, претендовавшие на шину, восстанавливают ранее обнуленные разряды, и начинается новый цикл арбитража.
Поясним алгоритм примером. Пусть в некоторый момент времени запрос на шину выставили три ведущих с номерами 10, 8 и 5. Положим, что уровни приоритета ведущих совпадают с их номерами, то есть на четырехразрядную шину В будут выданы соответственно коды 10102 (1010), 10002 (810) и 01012 (510). Так как над одноименными разрядами кодов выполняется операция логического сложения (устройства подключены к линиям по схеме «монтажного ИЛИ»), на шине В установится код Согласно рассмотренному выше правилу первое и второе устройства обязаны обнулить разряды с 2-го по 0-й (0-й разряд - младший), а третье — все разряды. В итоге на шине В установится новый код 10002, и первое устройство сможет немедленно восстановить ранее обнуленные разряды. Таким образом, на шине В будет код 10102,то есть код приоритета устройства с номером 10. Схема арбитража этого устройства опознает на шине свой уровень приоритета и захватит шину. После завершения транзакции устройство с номером 10 снимет свой код приоритета, а остальные два устройства восстановят свои. Далее начнется новая процедура арбитража.
Описанная процедура связана с определенными затратами времени на стабилизацию на арбитражных линиях номера устройства-победителя. Это время должно быть учтено в протоколе шины.
Чтобы исключить постоянное блокирование ведущих, обладающих низким приоритетом, Тауб впоследствии модернизировал свою схему, дополнив ее модулем равнодоступности (fairness module). Модуль запрещает выигравшему ведущему выдавать новые запросы до завершения обслуживания всех ожидающих запросов. Следует отметить, что это не гарантирует, а только помогает каждому ведущему получить право на управление шиной.
Вариации рассмотренной схемы широко используются в таких шинах, как Futurebus, NuBus, MultiBus II, Fastbus.
В целом схемы децентрализованного арбитража потенциально более надежны, поскольку отказ контроллера шины в одном из ведущих не нарушает работу с шиной на общем уровне. Тем не менее должны быть предусмотрены средства для обнаружения неисправных контроллеров, например на основе тайм-аута. Основной недостаток децентрализованных схем — в относительной сложности логики арбитража, которая должна быть реализована в аппаратуре каждого ведущего.
В некоторых ВМ применяют комбинированные последовательно-параллельные схемы арбитража, в какой-то мере сочетающие достоинства обоих методов. Здесь все ведущие разбиваются на группы. Арбитраж внутри группы ведется по последовательной схеме, а между группами — по параллельной.
Ограничение времени управления шиной
Вне зависимости от принятой модели арбитража должна быть также продумана стратегия ограничения времени контроля над шиной. Одним из вариантов может быть разрешение ведущему занимать шину в течение одного цикла шины, с предоставлением ему возможности конкуренции за шину в последующих циклах. Другим вариантом является принудительный захват контроля над шиной устройством с более высоким уровнем приоритета, при сохранении восприимчивости текущего ведущего к запросам на освобождение шины от устройств с меньшим уровнем приоритета.
Опросные схемы арбитража
В опросных методах запросы только фиксируются, и контроллер шины способен узнать о них, лишь опросив ведущих. Опрос может быть как централизованным — с одним контроллером, производящим опрос, так и — с несколькими контроллерами шины.
Данный механизм использует специальные линии опроса между контроллером (контроллерами) шины и ведущими — по одной линии для каждого ведущего. С целью уменьшения числа таких линий может формироваться номер запрашивающего ведущего, для чего вместо 2n достаточно п линий. Кроме того, используются также линии запроса шины и линия сигнала занятия шины.
Централизованный опрос
Централизованный опрос иллюстрирует рис. 4.15.
Контроллер шины последовательно опрашивает каждое ведущее устройство на предмет, находится ли оно в ожидании предоставления шины. Для этого контроллер выставляет на линии опроса адрес соответствующего ведущего. Если в момент выставления адреса ведущий ожидает разрешения на управление шиной, то он, распознав свой адрес, сигнализирует об этом, делая активной шину (ЗШ). Обнаружив сигнал, контроллер разрешает ведущему использовать шину. Последовательность опроса ведущих может быть организована в порядке убывания адресов, либо меняться в соответствии с алгоритмом динамического приоритета.
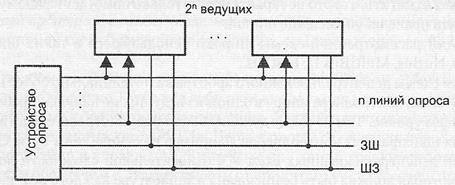
Рис. 4.15. Организация централизованного опроса ведущих
Децентрализованный опрос
Организация децентрализованного опроса показана на рис. 4.16.
Каждый ведущий содержит контроллер шины, состоящий из дешифратора адреса и генератора адреса. В начале опросной последовательности формируется адрес, который распознается контроллером. Если соответствующий ведущий ожидает доступа к шине, он вправе теперь ее занять. По завершении работы с шиной контроллер текущего ведущего генерирует адрес следующего ведущего, и процесс повторяется. При такой схеме обычно требуется применять систему с квитированием, использующую сигнал ЗШ, формируемый генератором адреса, и сигнал ПШ, генерируемый дешифратором адреса.
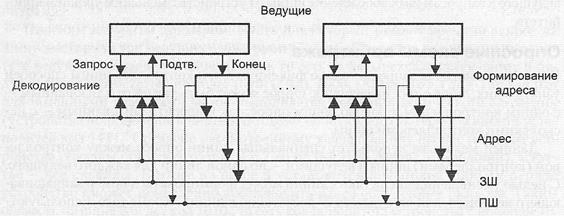
Рис. 4.16. Организация децентрализованного опроса ведущих
При децентрализованном опросе отказ в одной из точек приводит к отказу всей системы арбитража. Такая ситуация, впрочем, может быть предотвращена с помощью механизма тайм-аута: по истечении заданного времени функции отказавшего контроллера берет на себя следующий контроллер.
Протокол шины
Выставляя на шину адрес, ведущее устройство все его биты выдает на линии параллельно, что совсем не гарантирует их одновременного поступления к ведомому устройству. Отдельные биты адреса могут преодолевать более длинный путь, другие — предварительно должны пройти через аппаратуру преобразования адресов процессора в адреса шины. Кроме того, отличия есть и в характеристиках отдельных сигнальных линий, драйверов и приемников. Рассмотренная ситуация, как уже отмечалось, называется перекосом сигналов. Прежде чем реагировать на поступивший адрес, все ведомые должны знать, с какого момента его можно считать достоверным.
Ситуация с передачей данных еще сложнее, так как данные могут пересылаться в обоих направлениях. В транзакции чтения имеет место задержка на время, пока ведомое устройство ищет затребованные данные, и ведомый должен каким-то образом известить о моменте, когда данные можно считать достоверными. Система должна предусматривать возможный перекос данных.
Метод, выбираемый проектировщиками шин для информирования о достоверности адреса, данных, управляющей информации и информации состояния, называется протоколом шины. Используются два основных класса протоколов — синхронный и асинхронный. В синхронном протоколе все сигналы «привязаны» к импульсам единого генератора тактовых импульсов (ГТИ). В асинхронном протоколе для каждой группы линий шины формируется свой сигнал подтверждения достоверности. Хотя в каждом из протоколов можно найти как синхронные, так и асинхронные аспекты, различия все же весьма существенны.
Синхронный протокол
В синхронных шинах имеется центральный генератор тактовых импульсов (ГТИ), которого «привязаны» все события на шине. Тактовые импульсы (ТИ) распространяются по специальной сигнальной линии и представляют собой регулярную последовательность чередующихся единиц и нулей. Один период такой последовательности называется тактовым периодом шины. Именно он определяет минимальный квант времени на шине (временной слот). Все подключенные к шине устройства могут считывать состояние тактовой линии, и все события на шине отсчитываются от начала тактового периода. Изменение управляющих сигналов на шине обычно совпадает с передним или задним фронтом тактового импульса, иными словами, момент смены состояния на синхронной шине известен заранее и определяется тактовыми импульсами.
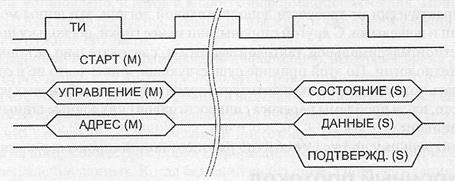
Рис. 4,17. Чтение на синхронной шине
На рис. 4.17 показана транзакция чтения с использованием простого синхронного протокола шины NuBus, применяемой в персональных компьютерах Macintosh (буквой «М» обозначены сигналы ведущего, а буквой «S» — ведомого). Моменты изменения сигналов на шине определяет нарастающий фронт тактового импульса. Задний фронт ТИ служит для указания момента, когда сигналы можно считать достоверными. Это не обязательное условие для любых синхронных шин — во многих шинах для указания достоверности данных просто отсчитывается определенная задержка от фронта ТИ. Рассматриваемая шина NuBus имеет две особенности: тактовые импульсы асимметричны, а для передачи адреса и данных используются одни и те же сигнальные линии.
Стартовый сигнал отмечает присутствие на линиях шины адресной или управляющей информации. Когда ведомое устройство распознает свой адрес и находит затребованные данные, оно помещает эти данные и информацию о состоянии на шину и сигнализирует об их присутствии на шине сигналом подтверждения.
Операция записи выглядит сходно. Отличие состоит в том, что данные выдаются ведущим в тактовом периоде, следующем за периодом выставления адреса, и остаются на шине до отправки ведомым сигнала подтверждения и информации состояния.
Отметим, что в каждой транзакции присутствуют элементы чтения и записи, и для каждого направления пересылки имеется свой сигнал подтверждения достоверности информации на шине. Сигналы управления и адрес всегда перемещаются от ведущего. Информация состояния всегда поступает от ведомого. Данные могут перемещаться в обоих направлениях.
Хотя скорость распространения сигналов в синхронном протоколе явно не фигурирует, она должна учитываться при проектировании шины. ТИ обычно распространяются вдоль шины с обычной скоростью прохождения сигналов, и за счет определенных усилий и затрат можно добиться практически одновременной доставки ТИ к каждому разъему шины. Выбираться тактовая частота должна таким образом, чтобы сигнал от любой точки на шине мог достичь любой другой точки несколько раньше, чем завершится тактовый период, то есть шина должна допускать расхождение в моментах поступления тактовых импульсов. Ясно, что более короткие шины могут быть спроектированы на более высокую тактовую частоту.
Синхронные протоколы требуют меньше сигнальных линий, проще для понимания, реализации и тестирования. Поскольку для реализации синхронного протокола практически не требуется дополнительной логики, эти шины могут быть быстрыми и дешевыми. С другой стороны, они менее гибки, поскольку привязаны к конкретной максимальной тактовой частоте и, следовательно, к конкретному уровню технологии. По этой причине существующие шины часто не в состоянии реализовать потенциал производительности подключаемых к себе новых устройств. Кроме того, из-за проблемы перекоса синхросигналов синхронные шины не могут быть длинными.
По синхронному протоколу обычно работают шины «процессор-память».
Асинхронный протокол
Синхронная передача быстра, но в ряде ситуаций не подходит для использования. В частности, в синхронном протоколе ведущий не знает, корректно ли ответил ведомый, — возможно, он был не в состоянии удовлетворить запрос на нужные данные. Более того, ведущий должен работать со скоростью самого медленного из участвующих в пересылке данных ведомых. Обе проблемы успешно решаются в асинхронном протоколе шины.
В асинхронном протоколе начало очередного события на шине определяется не тактовым импульсом, а предшествующим событием и следует непосредственно за этим событием. Каждая совокупность сигналов, помещаемых на шину, сопровождается соответствующим синхронизирующим сигналом, называемым стробом. Синхросигналы, формируемые ведомым, часто называют квитирующими сигналами (handshakes) или подтверждениями сообщения (acknowledges).
На рис. 4.18 показана асинхронная операция чтения с использованием протокола, применяемого в шине Fastbus.
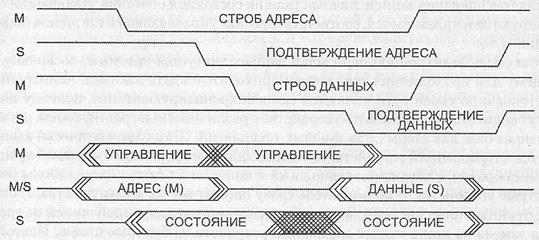
Рис. 4.18. Чтение на асинхронной шине
Сначала ведущее устройство выставляет на шину адрес и управляющие сигналы и выжидает время перекоса сигналов, после чего выдает строб адреса, подтверждающий достоверность информации. Ведомые следят за адресной шиной, чтобы определить, должны ли они реагировать. Ведомый, распознавший на адресной шине свой адрес, отвечает информацией состояния, сопровождаемой сигналом подтверждения адреса. Когда ведущий обнаруживает подтверждение адреса, он знает, что соединение установлено, и готов к анализу информации состояния. Присутствие адреса на TBA далее не требуется, поскольку у ведомого уже имеется копия полного адреса либо нужной его части.
Далее ведущий меняет управляющую информацию, выжидает время перекоса и выдает строб данных. Если это происходит в транзакции записи, то ведущий одновременно с управляющей информацией выставляет на шину записываемые данные. В рассматриваемом случае управляющая информация извещает ведомое устройство, что это чтение. Когда ведомый подготовит затребованные данные, он выдает их на шипу совместно с новой информацией о состоянии и формирует сигнал подтверждения данных. Когда ведущий видит сигнал подтверждения данных, он читает данные с шины и снимает строб данных, чтобы показать, что действия сданными завершены. В нашем примере ведущий снимает также и строб адреса. В более сложных вариантах транзакций строб адреса может оставаться на шине для поддержания соединения в течение нескольких циклов данных. Обнаружив исчезновение строба данных, ведомый снимает с шины данные и информацию состояния, а также сигнал подтверждения данных, переводя шину в свободное состояние.
В цикле асинхронной шины для подтверждения успешности транзакции используется двунаправленный обмен сигналами управления. Такая процедура носит название квитирования установления связи или рукопожатия (handshake). В рассмотренном варианте процедуры ни один шаг в передаче данных не может начаться, пока не завершен предыдущий шаг. Такое квитирование известно как квитирование с полной взаимоблокировкой (fully interlocked handshake).
Как и в синхронных протоколах, в любой асинхронной транзакции присутствуют элементы чтения и записи: по отношению к управляющей информации выполняется операция записи, а к информации состояния — чтения. Данные синхронизируются и управляются, соответственно, как управляющая и статусная информация.
Скорость асинхронной пересылки данных диктуется ведомым, поскольку ведущему для продолжения транзакции приходится ждать отклика. Асинхронные протоколы по своей сути являются самосинхронизирующимися, поэтому шину могут совместно использовать устройства с различным быстродействием, построенные на базе как старых, так и новых технологий. Шина автоматически адаптируется к требованиям устройств, обменивающихся информацией в данный момент. Таким образом, с развитием технологий к шине могут быть подсоединены более быстрые устройства, и пользователь сразу ощутит все их преимущества. В отличие от синхронных систем для ускорения системы с асинхронной шиной не требуется замена на шине старых медленных устройств на быстрые новые. Платой за перечисленные преимущества асинхронного протокола служит некоторое увеличение сложности аппаратуры.
Квитирование в асинхронных системах не всегда реализуется в полном объеме. Иногда транзакция на шине не может быть завершена стандартным образом, например, если ведущий из-за программных ошибок обращается к несуществующей ячейке памяти. В этом случае ведомое устройство не отвечает соответствующим подтверждающим сигналом. Чтобы предотвратить бесконечное ожидание в шинах, используется тайм-аут, то есть задается время, спустя которое отсутствии отклика транзакция принудительно прекращается. Для реализации тайм-аута необходимы схемы, способные решать, пришло ли подтверждение вовремя, и если нет, то как привести шину к исходному состоянию. Первая часть решается с помощью таймера, запускаемого ведущим одновременно с началом транзакции. Если таймер достигает предопределенного значения до поступления ответного сигнала, ведущий обязан прекратить начатую транзакцию. Восстановление состояния шины и вычислительного процесса после тайм-аута может происходить по-разному. Так, если ведущим устройством является процессор, он делает это с помощью специального вызова операционной системы, известного как «ошибка шины» (bus error).
Тайм-ауты цикла данных, обычно означающие отказ оборудования, достаточно редки, поэтому время тайм-аута может быть весьма большим. С другой стороны, тайм-ауты по адресу возникают часто. Происходит это, например, когда программа инициализирует систему и проверяет, какие из устройств присутствуют на шине; при этом вполне реальна выдача на шину адреса несуществующего устройства. В спецификациях шин предписываются очень малые значения тайм-аута по адресу, из-за чего устройства декодирования адреса в ведомых устройствах должны быть весьма быстрыми, чтобы уложиться в отведенное время.
Шины ввода/вывода обычно реализуются как асинхронные.
Особенности синхронного и асинхронного протоколов
В предшествующие годы проектировщики ВМ отдавали предпочтение асинхронным шинам, однако в последних высокопроизводительных разработках все чаще используются шины на базе синхронного протокола.
Существующие синхронные шины несколько быстрее асинхронных и по уровню быстродействия уже достаточно близки к физическим скоростям распространения сигналов. Возможное ускорение асинхронных шин по мере развития технологии может привести лишь к незначительному их преимуществу над синхронными. Любой из протоколов предполагает информирование схем арбитража о занятости шины. В синхронном протоколе шина занята от начала стартового сигнала до завершения сигнала подтверждения, и специальный сигнал занятости шины не нужен. В асинхронном протоколе о занятости шины свидетельствуют адресный строб или сигнал подтверждения адреса.
В асинхронной системе присутствует полная процедура квитирования установления связи, то есть во всех случаях оба устройства до удаления информации с шины должны прийти к соглашению. Таким образом, даже если одно из них роено на очень быстрых схемах, а другое — на очень медленных, взаимодействие все равно будет успешным.
Синхронные системы квитируются частично, за счет того, что ведомое устройство перед выдачей подтверждения может занимать под поиск нужных данных несколько тактовых периодов. С другой стороны, существует неявное требование, чтобы ведомый успел использовать или, по крайней мере, скопировать адрес и информацию управления за время одного тактового периода, до их исчезновения с сигнальных линий. Необходимо также, чтобы и считывание данных ведущим также происходило в пределах одного тактового периода, иначе эти данные будут утеряны Если в ведущем устройстве используется динамическая память, это требование может приводить к проблемам, если в момент получения данных память находится в режиме регенерации. Для решения подобных проблем обычно используют дополнительную буферную память. Отметим также, что если ведомому для завершения своей операции требуется время, лишь незначительно превышающее длительность тактового периода, транзакция все равно удлиняется на целый период. Это существенный недостаток по сравнению с асинхронным протоколом.
В обоих видах протоколов необходимо учитывать эффект перекоса сигналов. Максимальное значение времени перекоса равно разности времен прохождения сигналов по самой быстрой и самой медленной сигнальным линиям шины. В синхронных шинах перекос уже заложен в указанную в спецификации максимальную тактовую частоту, поэтому при проектировании устройств может не учитываться. Для асинхронных шин перекос необходимо принимать во внимание для каждой транзакции и для каждого устройства. Перед выставлением строба ведущее устройство выжидает в течение времени перекоса данных, считая от момента выставления на шину данных, так, что когда ведомый видит строб, он уже может считать данные достоверными. У ведомого дополнительно возможен перекос сигналов на внутренних трактах данных. Компенсировать его можно введением принудительной задержки, перед тем как использовать полученный сигнал стробирования. Когда ведомый возвращает данные ведущему, он должен после установки данных на шине, но до отправки сигнала подтверждения выждать время перекоса.
Учет перекоса может быть реализован как в ведущем, так и в ведомом устройстве, либо и там и там, лишь бы была обеспечена необходимая общая задержка. Например, в шине Fastbus, где количество ведущих обычно много меньше числа ведомых, ответственность за учет перекоса сигналов возлагается на ведущих, благодаря чему сокращается число устройств, которые потребуют модификации при изменении свойств шины. В рассматриваемой шине ведомый выставляет подтверждение одновременно с данными, а ведущий перед считыванием данных выжидает в течение времени перекоса. Величина компенсирующей задержки зависит от технологии шины, а также физических свойств и длины ее сигнальных линий. В свою очередь, ведомые должны самостоятельно отвечать за проблемы, связанные с их внутренними перекосами сигналов.
В обоих протоколах необходимо учитывать еще одну проблему – проблему метастабилъного состояния. Суть ее поясним на примере микропроцессора, к которому подключена клавиатура. Время от времени микропроцессор считывает информацию из регистра состояния клавиатуры, который должен «решить», была ли нажата клавиша, и в зависимости от этого возвратить единицу или ноль. Проблема возникает, если принятие решения практически совпадает с моментом опроса регистра. Если это происходит несколько раньше, регистр вернет 1, а если чуть позже, то 0, но факт нажатия запоминается в соответствующем триггере регистра состояния и будет зафиксирован при следующем опросе регистра. Сложность заключается в том, что в момент переключения триггера информация на входе должна оставаться неизменной. В спецификации на реальные триггеры указывается интервал вблизи тактового импульса, в течение которого входная информация не должна изменяться. Если данные не синхронизированы с ТИ и поступают от какого-либо независимого источника, как в примере с клавиатурой, предотвратить изменение входной информации триггера в запрещенном интервале невозможно. При нарушении данного условия триггер способен перейти в метастабильное состояние, то есть на его выходе может на неопределенное время установиться неоднозначный уровень напряжения, который сохранится, пока случайный шум не установит триггер в то или иное стабильное состояние.
Метастабильное состояние триггера опасно неопределенным поведением схем, для которых информация триггера является входной. К сожалению, многие проектировщики игнорируют упомянутую проблему, и это становится причиной случайных ошибок.
Кардинально решить означенную проблему принципиально невозможно, поэтому при проектировании необходимо проявить особую тщательность, чтобы уменьшить вероятность возникновения метастабильного состояния. Одним из методов может быть правильный выбор элементов, поскольку некоторые триггеры срабатывают быстрее, чем иные. Эффективными способами могут являться использование двухтактных триггеров и/или синхронизация триггеров тактовыми импульсами, что снижает вероятность ошибки до уровня несущественной.
В асинхронных системах имеется иная возможность: специальные схемы для обнаружения метастабильных состояний, где асинхронная система вправе просто выждать, пока состояние не станет стабильным.
Методы повышения эффективности шин
Существует несколько приемов, позволяющих повысить производительность шин. К ним, прежде всего, следует отнести пакетный режим, конвейеризацию и расщепление транзакций.
Пакетный режим пересылки информации
Эффективность как выделенных, так и мультиплексируемых шин может быть улучшена, если они функционируют в блочном или пакетном режиме (burst mode), когда один адресный цикл сопровождается множественными циклами данных (чтения или записи, но не чередующимися). Это означает, что пакет данных передается без указания текущего адреса внутри пакета.
При записи в память последовательные элементы блока данных заносятся в последовательные ячейки. Так как в пакетном режиме передается адрес только первой ячейки, все последующие адреса генерируются уже в самой памяти путем последовательного увеличения начального адреса. Передача на устройства ввода/ вывода или в память наподобие очереди может не сопровождаться изменением начального адреса.
Скорость передачи собственно данных в пакетном режиме увеличивается естественным образом за счет уменьшения числа передаваемых адресов. Внутри пакета очередные данные могут передаваться в каждом такте шины, длина пакета может достигать 1024 байт. Наиболее частый вариант – пакеты, состоящие из четырех байтов. Такие пакеты используются при работе с памятью в 32-разрядных ВМ, где длина ячейки памяти равна одному байту.

Рис. 4.19. Пакетный режим передачи данных
Рисунок 419 иллюстрирует концепцию адресации в пакетном режиме при пересылке данных. По шине адреса передается только адрес ячейки i, а в данных для ячеек i+1, i+2 и i+3 указание соответствующих адресов отсутствует.
В асинхронных системах пакетный режим позволяет достичь дополнительного эффекта. Как известно, время пересылки слова включает в себя время прохождения слова от отправителя к приемнику и время, затрачиваемое на процедуру подтверждения. Необходимо также учесть внутренние задержки в ведущем и ведомом устройствах и, наконец, дополнительные издержки на восстановление исходного состояния шины после процедуры квитирования. В ходе пакетной передачи можно избавиться от этих задержек и работать с максимальной пропускной способностью, которую допускают ширина полосы пропускания линий и перекос сигналов, за счет разрешения отправителю начинать следующий цикл данных не ожидая подтверждения. Реализация описанного режима сопряжена с некоторыми ограничениями. В частности, становится невозможным восстановление ошибок в каждом цикле. Кроме того, скорость должна быть тщательно согласована с особенностями каждой передачи.
Примером шины, обеспечивающей пакетный режим передачи, может служить современная шина Futurebus+.
Конвейеризация транзакций
Одним из способов повышения скорости передачи данных по шине является конвейеризация транзакций. Очередной элемент данных может быть отправлен устройством А до того, как устройство В завершит считывание предыдущего элемента. Аналогичное решение уже рассматривалось в разделе, посвященном пакетному режиму, однако сам прием применим и к обычным транзакциям. На рис. 4.20 показана конвейеризация транзакций чтения.
Дата добавления: 2019-04-03; просмотров: 385;