Характеристики управления ИМ
Основной функцией ИМ, как «элемента» АЭП, является преобразование сигнала управления uу(t) в скважность γ(t) или частоту коммутации fк(t). Процесс преобразования осуществляется не непрерывно, а лишь в дискретные моменты времени ti, определяющие моменты формирования открывающих импульсов полупроводниковых приборов ПИУ.
В основе функционирования большинства аналоговых ИМ лежит принцип управления, сущность которого заключается в сравнении напряжений управления uу(t) и периодического опорного uоп(t) и формирование открывающих импульсов на участке равенства uоп(t) = uу(t). В качестве опорного напряжения в ИМ используется: пилообразное однополярное с задним и передним нерабочим фронтом однополярное треугольное, двухполярное треугольное, двухполярное пилообразное. Частота опорного напряжения fк зависит от вида используемых полупроводниковых приборов, мощности электропривода и т.п. и составляет от 1000 до 20000 Гц. В электроприводе в большинстве случаев для преобразования напряжения используется широтно-импульсная модуляция.
Характеристика управления ИМ при пилообразном опорном
Напряжении
Характеристикой управления ИМ называется зависимость скважности γ от сигнала управления uу, т.е. γ = f(uу). Преобразование сигнала uу в скважность γ в аналоговой ШИМ осуществляется суммирующим нуль органом. (Рис.3.2).
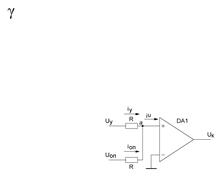
Рис. 3.2 Функциональная схема суммирующего нуль-органа
Временная диаграмма преобразования сигнала управления uу в длительность t0 открывающего импульса показана на рис.3.3.

Рис.3.3 Временные диаграммы
преобразования сигнала управления uу
Запишем первое уравнение Кирхгофа для узла а:
iу + iоп = iн (3.1)
где iу , iоп , iн – ток управления, опорный, неинвертирующего входа компаратора, соответственно.
В момент равенства iу = iоп, компаратор DA1 меняет свое состояние. При этом t = t0, электрический потенциал узла «а»: φ0 = 0. Для этого момента времени можно записать


 (3.2)
(3.2)
Подставив в (3.1) уравнение (3.2), получим
 при t = t0,
при t = t0,
или
uоп + uу = 0 при t = t0. (3.3)
Пилообразное напряжение в пределах изменения t от 0 до Tк описывается выражением
где Uопм – максимальное значение опорного напряжения.
При t = t0
 (3.4)
(3.4)
Подставив (3.4) в (3.3) получим
 (3.5)
(3.5)
Учитывая, что  из (3.5) получим
из (3.5) получим  , или
, или 
где  - коэффициент передачи ИМ с пилообразным опорным напряжением.
- коэффициент передачи ИМ с пилообразным опорным напряжением.
Последнее выражение представляет собой характеристику управления ИМ. Графиком является прямая линия (Рис. 3.4).

Рис.3.4 График характеристики управления ИМ
при пилообразном опорном напряжении
Дата добавления: 2018-06-28; просмотров: 601;