Рекуперативного торможения.
Для получения тормозного режима двигателя необходимо обеспечить протекание якорного тока под действием ЭДС якоря, т.е. перевести двигатель в генераторный режим работы.
Применяется три способа (Рис.2.20):
1. Изменением направления ЭДС якоря путем изменения направления магнитного потока двигателя (Рис.2.20 а).
2. Изменением направления ЭДС якоря путем переключения полярности подключения двигателя к нереверсивному выпрямителю (Рис.2.20 б).
3. С помощью реверсивного выпрямителя (Рис.2.20в).
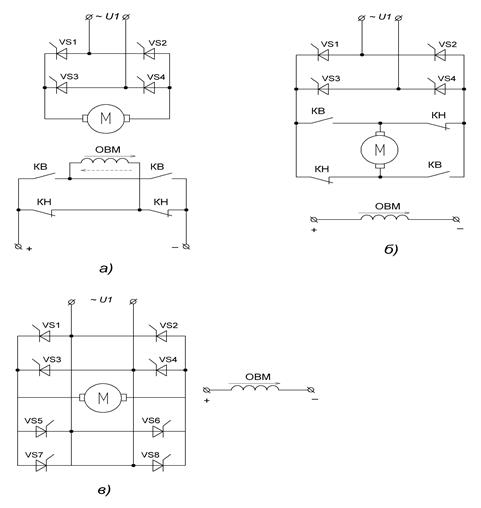
Рис. 2.20 Схемы используемые для обеспечения рекуперативного торможения
Электромагнитные процессы в силовой цепи в режиме рекуперативного торможения во всех трех случаях протекают аналогично.
При использовании реверсора в цепи якоря или обмотки возбуждения (Рис.2.20 а, б) изменяется полярность подключения ЭДС якоря Eя. двигателя к выпрямителю. При этом ток в цепи выпрямителя может протекать на большей части проводимости вентилей лишь под действием ЭДС, действующей в цепи выпрямленного тока. Причем, двигатель должен быть подключен плюсом ЭДС якоря к анодной группе вентилей, а минусом - к катодной группе. Для обеспечения безаварийной работы системы электропривода «управляемый выпрямитель – двигатель» необходимо установить углом открывания α выпрямителя больше 90°, чтобы выполнялись условия Eя > |E0·cosα| и
Iя = (Eя + E0·cosα) / R ≤ Iямакс.
Анализ электромагнитных процессов проведем на основе графического решения уравнения якорной цепи для генераторного режима при условии eя = Eя = const и 2∆Um = 0:
Eя + e + eL = Riя (25)
Уравнению (25) соответствует эквивалентная электрическая схема силовой цепи для генераторного режима работы двигателя (Рис. 21).
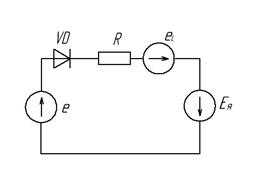
Рис. 2.21 Эквивалентная электрическая схема силовой цепи
для генераторного режима работы двигателя
Для получения тормозного режима осуществим переключение полярности подключения двигателя к нереверсивному выпрямителю (Рис. 22).
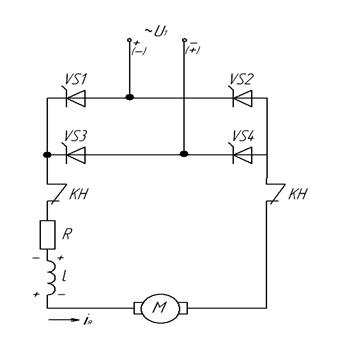
Рис.2.22 Изменение направления ЭДС якоря путем переключения полярности
В момент времени, соответствующий углу α, подаются открывающие импульсы и тиристоры VS1 и VS4 открываются.
Двигатель подключен к сети через тиристоры VS1, VS4 в течение фазавого интервала α ≤ ω1t < π + α (Рис. 23).
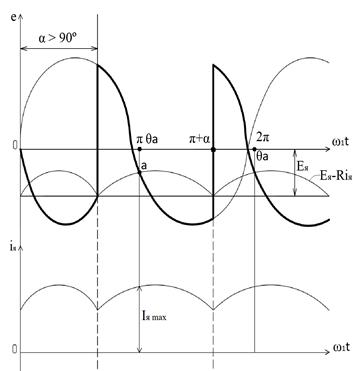
Рис.2.23 Временные диаграммы для режима
рекуперативного торможения
При угле ω1t = α полярность сетевого напряжения положительна (обозначена на схеме без скобок). На интервале α ≤ ω1t ≤ π ЭДЯ якоря Eя и напряжение сети через VS1 и VS4 включены согласно. Под действием суммы ЭДС (Eя + e) ток iя нарастает. Темп нарастания тока в цепи ограничивается ЭДС самоиндукции eL. Часть электрической энергии, вырабатываемая двигателем и потребляемая из сети преобразуется в тепловую энергию в сопротивлении R (торможение противовключением), а часть запасается в электромагнитном поле индуктивности L. В момент времени, соответствующий углу ω1t = π полярность напряжения в сети изменяется (обозначена в скобках на схеме рис.22). Часть электрической энергии, вырабатываемой двигателем, преобразуется в тепловую энергию в сопротивлении R, часть запасается в электромагнитном поле индуктивности L,а часть энергии возвращаетсяв источник питания (сеть). В момент времени, когда мгновенное значение ЭДС e станет равным сумме (Eя – Riя) (точка а на рис. 23), ЭДС eL станет равной нулю в соответствии с уравнение (24), т.е.  , а ток iя достигнет максимального значения. В течение фазового интервала θа ≤ ω1t < π + α ЭДС eL > 0, действует согласно с ЭДС якоря Eя и препятствует спаданию тока iя. Электрическая энергия вырабатываемая двигателем и запасенная в электромагнитном поле индуктивности L преобразуется в тепловую в сопротивлении R и возвращается в источник питания (сеть) (рекуперативное торможение).
, а ток iя достигнет максимального значения. В течение фазового интервала θа ≤ ω1t < π + α ЭДС eL > 0, действует согласно с ЭДС якоря Eя и препятствует спаданию тока iя. Электрическая энергия вырабатываемая двигателем и запасенная в электромагнитном поле индуктивности L преобразуется в тепловую в сопротивлении R и возвращается в источник питания (сеть) (рекуперативное торможение).
Из анализа электромагнитных процессов видно, что на меньшей части интервала проводимости энергия потреблялась из сети α ≤ ω1t < π (выпрямительный режим), а на большей части π ≤ ω1t < π + α (инверторный режим) - отдавалась в сеть. В среднем, за интервал проводимости λ = π электрический двигатель работал в режиме рекуперативного торможения с отдачей части энергии в источник питания.
Для безаварийной работы выпрямителя в инверторном режиме угол α не должен превышать максимального значения αмакс (Рис. 24) определяемого выражением:
αмакс = 180° - ∆α,
где ∆α = δ + ψ + γ – угол запаса безаварийной работы инвертора,
δ – угол, соответствующий времени полного восстановления запирающих свойств тиристора после его отключения,
ψ – угол запаса учитывающий наибольшее возможное значение несимметрии подачи открывающих импульсов,
γ – угол коммутации.
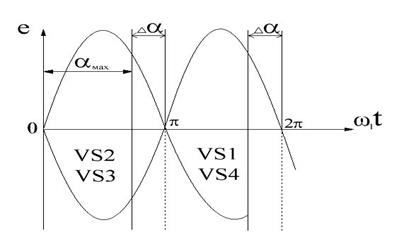
Рис.2.24 Максимальный угол открывания αмакс
Если в процессе работы условие ограничения αмакс не будет выполнено, то при коммутации тока с VS2 - VS3 на VS1 - VS4 тиристоры VS2, VS3 не восстановят своих запирающих свойств и в момент коммутации окажутся под более положительным напряжением, чем VS1 и VS4. Вследствие этого VS2, VS3 не закроются, а VS1 и VS4 не откроются. В результате ЭДС сети через VS2 и VS3 и ЭДС якоря окажутся включенными согласно. Ток якоря начнет нарастать до значений значительно превышающих рабочий. Для двигателя такой режим является режимом противовключения без введения дополнительных сопротивлений в цепь якоря. Для выпрямителя такой режим работы называется «опрокидыванием инвертора». Для тиристорных выпрямителей αмакс не превышает 160°. Максимальное значение ЭДС якоря электрической машины, работающей в генераторном режиме при идеальном холостом ходе Eмакс = E0·cosαмакс.
2.5.6. Электромеханические и механические харакетристики системы электропривода «УВ-ДПТ»
Электромеханической характеристикой системы электропривода «УВ-ДПТ» называется зависимость среднего значения угловой скорости ωср от среднего значения тока якоря Iя при постоянном значении угла открывания α.
Механической характеристикой называется зависимость среднего значения угловой скорости ωср от среднего значения электромагнитного момента М при постоянном значении угла открывания α.
Перепишем уравнение (10) для РНТ при пренебрежении падением напряжения на тиристорах l∆Um:
 (26)
(26)
Подставив уравнение E = E0·cosα и уравнения связи (13) и (14) для средних значений в уравнение (26) получим уравнение электромеханической характеристики:
 , (27)
, (27)
и механической
 , (28)
, (28)
где  - номинальное значение магнитного потока на полюс.
- номинальное значение магнитного потока на полюс.
Графиками полученных характеристик являются прямые линии. Первые слагаемые уравнений (27) и (28) определяют скорость идеального холостого хода
 , (29)
, (29)
а второе слагаемое – падение скорости из-за действия момента нагрузки на валу двигателя:
 ,
,  . (30)
. (30)
Так как в системе электропривода при малых значениях тока якоря наступает режим прерывистого тока, то для него электромеханические и механические характеристики представляются выражениями, отличными от выражений для РНТ.
Для РПТ уравнение электромеханической характеристики:
 ,
,
и механической
 ,
,
где Rф (Iя) – фиктивное сопротивление выпрямителя, учитывающее режим прерывистого тока.
Сопротивление Rф (Iя) зависит от угла открывания α, величины тока якоря Iя, параметров якорной цепи и от интервала проводимости λ.
Значение ЭДС  определяется следующим образом
определяется следующим образом
 (31)
(31)
где  - для однофазного мостового выпрямителя,
- для однофазного мостового выпрямителя,
 - для трехфазного мостового выпрямителя, питаемого от сети,
- для трехфазного мостового выпрямителя, питаемого от сети,
 - для трехфазного мостового выпрямителя, питаемого от трансформатора,
- для трехфазного мостового выпрямителя, питаемого от трансформатора,
 - для трехфазной нулевой схемы, питаемой от трансформатора.
- для трехфазной нулевой схемы, питаемой от трансформатора.
На рис. 25 представлены электромеханические характеристики системы «УВ-ДПТ».
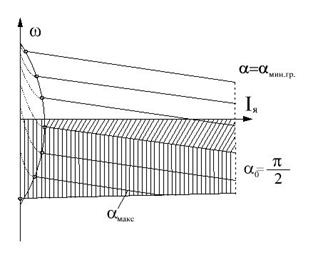
Рис. 2.25 Электромеханические характеристики системы УВ-ДПТ
Для упрощения процесса построения электромеханических и механических характеристик в режиме прерывистого тока можно заменить нелинейную часть характеристик в зоне прерывистого тока линейной, воспользовавшись следующей методикой:
- строим характеристики по уравнениям (27), (28) для требуемых значений α;
- для требуемых значений угла α определяем по уравнению(24) значения граничных токов Iя.гр;
- для требуемых значений угла α определяем значения угловой скорости 
 используя (31);
используя (31);
- соединяем прямой линией точки  и Iя.гр для соответствующих значений угла α.
и Iя.гр для соответствующих значений угла α.
Система электропривода «УВ-ДПТ» может работать (Рис. 25) в режимах: двигательном в зоне ограниченной осями ω, Iя и характеристикой при α = αмин.гр, режиме противовключения (зона наклонной штриховки), режиме динамического торможения при α = π/2, в режиме рекуперативного торможения в зоне вертикальной штриховки. Из характеристик в зоне прерывистого тока видно, что скорость двигателя в РПТ выше чем в РНТ при одном и том же угле α и неоднозначно зависит от угла α, т.е. в РПТ выпрямитель теряет управляемость. Следовательно, система электропривода «УВ-ДПТ» может функционировать лишь с обратной связью по скорости.
Дата добавления: 2018-06-28; просмотров: 764;