Кинематическая схема лебедки
Кинематическая схема лебедки приведена на рис. 304.
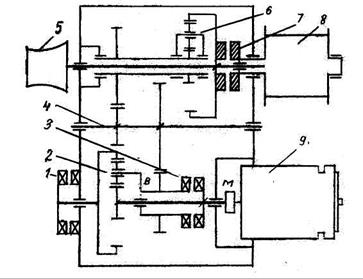
Рис. 304. Кинематическая схема АШЛ типа АВВ 80:
1 – электромагнитный тормоз; 2 – планетарная передача; 3 – электромагнитная муфта; 4 – промежуточный вал; 5 – турачек ( швартовный барабан ); 6 – планетарный редуктор-измеритель натяжения; 7 – зубчатая муфта сцепления; М – муфта упругая пальцевая
В кинематическую схему ( рис. 304 ) входят две планетарные передачи – 2 и 6. Последняя представляет собой планетарный редуктор-измеритель натяжения.
Двигатель 9 соединен с редуктором через упругую пальцевую муфту М. Ведущий приводной вал включает в себя ступень планетарной передачи 2, электромагнитную муф-
ту 3 и электромагнитный тормоз 1.
В нормальном режиме работы электромагнитная муфта 3 разобщена, электромаг-
нитный тормоз 1 обесточен и удерживает неподвижным венечное колесо 2 планетарной передачи.
При работе двигателя М его вращающий момент через муфту М передается непо-
средственно на солнечное колесо и через сателлитные шестерни и водило В на промежу-
точный вал 4.
От промежуточного вала 4 приводится во вращение солнечная шестерняпланетар
ной передачи 6, которая наружным венечным колесом сообщается непосредственно с гру-
зовым валом. На правом конце вала находится швартовный барабан 8, на левом – турачек 5 ( на судах турачек называют «турачка», что не совсем правильно ).
Перед началом работы боцман сообщает ( соединяет ) швартовный барабан 8 с гру-
зовым валом при помощи зубчатой муфты 7, рычаг привода которой выведен наружу и на
ходится на верхней крышке редуктора.
Турачек 5 закреплен непосредственно на грузовом валу и поэтому вращается все то время, пока включен двигатель 9.
Для увеличения скорости выбирания ( травления ) троса при помощи схемы управ-
ления ( более подробно см. ниже ) подают питание на катушку электромагнитного тормо
за 1 и электромагнитную муфту 3. В результате электромагнитный тормоз освобождает венечное колесо планетарной передачи 2, а через электромагнитную муфту вал электро
двигателя 9 напрямую соединяется с промежуточным валом 4.
Тем самым из кинематической схемы исключается планетарная передача 2 ( ее шес
терни вращаются вхолостую ), вследствие чего уменьшается общее передаточное число редуктора и увеличивается скорость вращения грузового барабана.
Кинематическая схема датчика длины вытравленного троса
Кинематическая схема датчика длины вытравленного троса приведена на рис. 305.
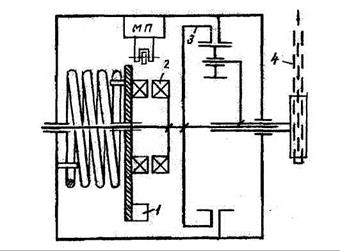
Рис.305. Кинематическая схема датчика длины вытравленного троса АШЛ типа АВВ 80
В состав датчика входят ( рис. 305 ):
1 – кулачок датчика ( электромагнитной муфты );
2 – электромагнитная муфта;
3 – венечная шестерня редуктора;
4 – цепной привод от промежуточного вала.
Датчик пристроен снаружи корпуса редуктора и имеет цепной привод 4 от проме-
жуточного вала. Как следует из кинематической схемы, вращающий момент цепного при
вода 4 передается на промежуточную шестерню, сообщённую с венечной шестерней 3.
На одном валу с этой шестерней находится правая половина электромагнитной муфты 2. Левая половина муфты через винтовую пружину механически сообщена с корпу
сом датчика. На ней находится кулачок 1.
Если электромагнитная муфта выключена, обе половины муфты разобщены. Поэто
му при вращении швартовного барабана шестерня 3 и правая половина муфты 2 вращают-
ся свободно.
Если электромагнитная муфта включена, обе половины муфты сообщаются. Поэто-
му при вращении швартовного барабана поворачивается левая половина муфты, заводя
( закручивая ) при этом пружину.
Вместе с этой половиной муфты поворачивается кулачок 1. Если общая длина шва
ртовного каната изменится на ± 10 м, кулачок набегает на микропереключатель МП ( в верхней части рис. 8.10 ), включая тревожную сигнализацию.
Поворот левой половины муфты передаётся:
1. на стрелочный указатель длины вытравленного троса;
2. через шарнирное устройство – на подвижную часть ( салазки ) датчика натяже
ния каната.
В состав шарнирного устройства входит масляный демпфер, сглаживающий пере-
дачу колебательных нагрузок на салазки ДНК.
Кинематическая схема измерительной части датчика натяжения каната
Кинематическая схема измерительной части датчика натяжения каната приведена
на рис. 306.
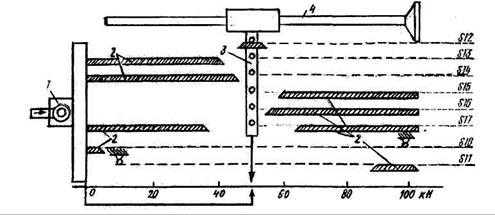
Рис. 306. Кинематическая схема измерительной части датчика натяжения каната АШЛ типа АВВ 80:
1 – тяга шарнирная; 2 – профильные кулачки; 3 – стойка с микровыклю-
чателями; 4 – маховичок изменения уставки усилия
1 – тяга шарнирная ( иначе – рычаг-водило ), для передачи усилия от датчика длины вытравленного троса ( 8.10 ) к датчику натяжения каната ;
2 – профильные кулачки S11…S18 ( заштрихованы, 8 шт. );
3 - стойка с микропереключателями ;
4 - маховичок изменения уставки усилия, для задания необходимого усилия в тросе.
Профильные кулачки находятся на салазках с горизонтальными направляющими.
При изменении усилия в канате салазки с кулачками перемещаются влево или вправо. Кулачки набегают на микропереключатели на стойке 3 и переключают их контакты.
Для регулировки усилия стойку 3 поднимают или опускают при помощи привода 4.
Датчик имеет 2 стрелки- указателя :
1. заданного усилия; эта стрелка механически связана со стойкой 3 ( верхняя
стрелка );
2. истинного усилия; эта стрелка ( нижняя ) механически связана через
рычаг 1 с датчиком натяжения каната.
На рис. 306 стойка 3 находится в положении, которому соответствует усилие 50 кН ( 5 тонн ).
Дополнительно на корпусе стойки 3 закреплены два выключателя:
1. S11 – выключатель ускоренного режима работы, замкнут при усилиях только до
Р< 12кН ( 1,2 тонны ), для получения режима ускоренной работы;
2. S18 – максимальный выключатель натяжения каната, размыкается при увеличе
нии усилия до значения Р> 100 кН ( 10 тонн ), для включения аварийной сигнализации.
Датчик натяжения, кроме шкалы и стрелочных указателей, имеет осветительную лампу Н ( рис. 307 ), которая одновременно сигнализирует о наличии питания на схеме управления.
Дата добавления: 2017-08-01; просмотров: 4685;