Определение скоростей и ускорений
Планом скоростей (ускорений) механизма называется пучок векторов, выходящих из одной точки (полюса плана), каждый из которых в некотором масштабе изображает вектор абсолютной скорости (абсолютного ускорения) какой-либо точки механизма, а отрезки, соединяющие их концы, изображают векторы относительных скоростей (относительных ускорений).
Построение плана скоростей сводится к реализации известного положения теоретической механики, согласно которому при плоско-параллельном движении твёрдого тела (звена) скорость любой его точки равна векторной сумме скорости в поступательном переносном движении вместе с другой точкой, принятой в качестве полюса, и скорости её в относительном вращательном движении относительно этого полюса.
| |
 в исследуемом положении. Прежде необходимо определить параметры движения точки А. Её скорость по величине равна произведению угловой скорости
в исследуемом положении. Прежде необходимо определить параметры движения точки А. Её скорость по величине равна произведению угловой скорости  кривошипа 1 на его радиус
кривошипа 1 на его радиус  , т. е.
, т. е.  и направлена перпендикулярно кривошипу в сторону движения точки А. Ускорение точки А по величине равно произведению квадрата угловой скорости кривошипа также на его радиус, т. е.
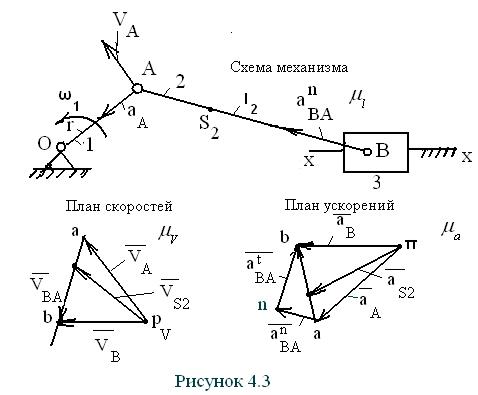
и направлена перпендикулярно кривошипу в сторону движения точки А. Ускорение точки А по величине равно произведению квадрата угловой скорости кривошипа также на его радиус, т. е.  и направлено от точки А к точке О, так как совпадает с нормальной составляющей полного ускорения точки А из-за равенства нулю тангенциальной составляющей ускорения (угловое ускорение кривошипа принимается равным нулю). Точка А принадлежит не только кривошипу, но и шатуну 2 и принимается в качестве полюса относительного вращения точки В. Скорость точки В определяется векторным равенством
и направлено от точки А к точке О, так как совпадает с нормальной составляющей полного ускорения точки А из-за равенства нулю тангенциальной составляющей ускорения (угловое ускорение кривошипа принимается равным нулю). Точка А принадлежит не только кривошипу, но и шатуну 2 и принимается в качестве полюса относительного вращения точки В. Скорость точки В определяется векторным равенством  , т. е. скорость точки В равна скорости точки А плюс скорость точки В относительно точки А. В этом равенстве первое слагаемое правой части известно по величине и по направлению, второе слагаемое направлено перпендикулярно шатуну 2 в данном положении, т. е. известно по направлению, и, наконец, вектор левой части направлен параллельно направляющим ползуна. При этих условиях треугольник скоростей легко строится в предварительно выбранном масштабе
, т. е. скорость точки В равна скорости точки А плюс скорость точки В относительно точки А. В этом равенстве первое слагаемое правой части известно по величине и по направлению, второе слагаемое направлено перпендикулярно шатуну 2 в данном положении, т. е. известно по направлению, и, наконец, вектор левой части направлен параллельно направляющим ползуна. При этих условиях треугольник скоростей легко строится в предварительно выбранном масштабе  .
.
Построение плана ускорений производится в той же последовательности, что и план скоростей. При этом используется векторное равенство  , в котором первый вектор правой части известен полностью, второй неизвестен ни по величине, ни по направлению. Вектор левой части известен по направлению – он направлен параллельно направляющим ползуна. В этих условиях треугольник ускорений не строится. Разложим вектор относительного ускорения на две составляющих, согласно равенству
, в котором первый вектор правой части известен полностью, второй неизвестен ни по величине, ни по направлению. Вектор левой части известен по направлению – он направлен параллельно направляющим ползуна. В этих условиях треугольник ускорений не строится. Разложим вектор относительного ускорения на две составляющих, согласно равенству  . Первое слагаемое представляет собой относительное нормальное ускорение, направленное от точки В к точке А и равное по величине частному от деления квадрата относительной скорости на длину шатуна, т. е.
. Первое слагаемое представляет собой относительное нормальное ускорение, направленное от точки В к точке А и равное по величине частному от деления квадрата относительной скорости на длину шатуна, т. е.  . Второе слагаемое, относительное тангенциальное ускорение направлено перпендикулярно шатуну 2 и неизвестно по величине. Теперь план ускорений строится без затруднений с применением заранее выбранного масштаба
. Второе слагаемое, относительное тангенциальное ускорение направлено перпендикулярно шатуну 2 и неизвестно по величине. Теперь план ускорений строится без затруднений с применением заранее выбранного масштаба  . Планы скоростей и ускорений данного механизма представлены на рис. 4.3.
. Планы скоростей и ускорений данного механизма представлены на рис. 4.3.
Используя планы, легко найти физические величины скоростей и ускорений, для этого необходимо измерить отрезки в миллиметрах, выражающие скорости и ускорения, и умножить их на соответствующий масштаб.
Абсолютная скорость точки В:  ,
,  .
.
Относительная скорость точки В:  , .
, .
Угловая скорость шатуна 2:  ,
,  .
.
Тангенциальное ускорения точки В относительно точки А:
 ,
,  .
.
Полное относительное ускорение:  , .
, .
Угловое ускорение шатуна 2:  ,
,  .
.
| |
(метод графического дифференцирования)
Основой метода служит известное положение математики, согласно которому производная функции, заданной в виде графика, в какой-либо её точке численно равна тангенсу угла наклона касательной, проведённой в этой точке к графику функции, то есть
 .
.
Так как теория механизмов и машин имеет дело с именованными числами, то при определении величины тангенса необходимо учитывать масштабы по осям координат графика функции (рис. 4.4), тогда
 .
.
Выберем горизонтальный отрезок произвольной длины и проведём из его левого конца наклонную прямую, параллельную касательной, а из правого конца – вертикальную прямую до пересечения с наклонной. Вычислим длину отрезка, полученного на вертикали и обозначенного на рис. 4.4 буквой  . Построенный треугольник является прямоугольным с углом против вертикального катета, равным
. Построенный треугольник является прямоугольным с углом против вертикального катета, равным 
 . Поэтому, записав из треугольника
. Поэтому, записав из треугольника  и подставив это отношение в предыдущее выражение, получаем
и подставив это отношение в предыдущее выражение, получаем
 .
.
В правой части этого выражения переменной величиной является только  , остальные образуют постоянное число, которое можно считать масштабом, то есть
, остальные образуют постоянное число, которое можно считать масштабом, то есть
 .
.
Таким образом мы убедились, что отрезок в масштабе  выражает производную в данной точке графика.
выражает производную в данной точке графика.
Для применения рассмотренной методики необходимо предварительно построить график или функции положения механизма, или график аналога скорости. Чтобы построить график производной, необходимо на продолжении оси абсцисс этого графика в левую сторону от оси ординат выбрать произвольный отрезок  и на нём строить все треугольники, необходимые для определения отрезков . Все эти отрезки получаются на оси ординат, но каждый из них необходимо разместить на ординатной прямой соответствующего номера, а их концы соединить плавной кривой. Эта процедура даст искомый график.
и на нём строить все треугольники, необходимые для определения отрезков . Все эти отрезки получаются на оси ординат, но каждый из них необходимо разместить на ординатной прямой соответствующего номера, а их концы соединить плавной кривой. Эта процедура даст искомый график.
Вопросы для самопроверки
1. Сформулируйте задачи кинематического анализа механизмов с низшими парами.
2. Перечислите методы исследования кинематики механизмов.
3. Что должно быть задано для исследования кинематики механизма?
4. В чём заключается сущность аналитического метода исследования кинематики?
5. Что называется масштабом в ТММ?
6. Что такое разметка механизма?
7. Для чего строится разметка?
8. Как определяются скорость и ускорение конца кривошипа?
9. Запишите векторные уравнения для построения планов скоростей и ускорений и объясните их составляющие. Какое правило механики положено в основу этих уравнений?
10. Как определяются скорости и ускорения центра масс шатуна?
11. Как определить угловые скорость и ускорение стержневого звена?
12. Какое правило математики положено в основу графического дифференцирования функции, заданной в виде графика?
13. Приведите пример построении графика производной при заданном графике функции.
14. Как определяются масштабы по осям координат при построении графика производной?
Дата добавления: 2016-12-26; просмотров: 4858;