Лекция №2 Постановка задачи управления технологическими процессами производства РЭС
Любой целенаправленный процесс, происходящий в производстве РЭС, представляет собой организованную совокупность операций. Эти операции можно разделить на две группы:
1. Рабочие операции.
2. Операции управления.
Рабочие операции - это действия, необходимые непосредственно для выполнения процесса в соответствии с природой (физические, химические) и законами, определяющими ход процесса производства. Например, технологический процесс напыления на термовакуумной установке или технологический процесс травления пленок. Это операция подачи и закрепления подложки, установки материала и нанесения пленки.
Операция управления. Для достижения цели процесса управления рабочие операции должны организовываться и направляться действиями другого рода, называемыми операциями управления. Так в процессе напыления к таким операциям относятся своевременное включение и выключение установки, поддержание заданной величины тока напыления или движение подложкодержателя по определенной траектории.
Совокупность операций управления образует процесс управления. Система, в которой осуществляется процесс управления, называется системой управления.
В структурном аспекте любую систему управления можно представить взаимосвязанной совокупностью объекта управления, т.е. производственного процесса и управляющего органа.
Объект управления называется управляемой подсистемой, а управляющий орган называется управляющей подсистемой.
Воздействие окружающей среды называется возмущающим воздействием.
Объектом управления могут быть отдельное технологическое оборудование, технологический процесс, бригада рабочих (группа студентов) или рабочий, цех или все предприятие, производственное объединение или отрасль народного хозяйства.
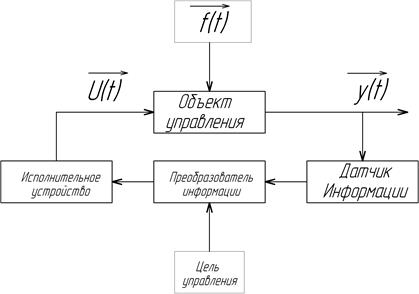
Рис 2.1
В качестве управляющего органа можно рассматривать устройство или человека, управляющих технологическим оборудованием, технологическим процессом.
Управляющим органом является так же мастер цеха, декан факультета, староста студенческой группы и т.д.
Любой процесс управления должен быть целенаправленным. Это значит, что управляющему органу должна быть известна цель управления, т.е. информация, используя которую можно определить желаемое состояние объекта управления. Управляющий орган воздействует на объект управления так, чтобы его состояние соответствовало желаемому.
Объект управления представляет собой открытую систему, а значит, находится в динамическом взаимодействии с внешней средой.
Влияние внешней среды на объект управления, как правило, носит неконтролируемый характер и выражается в случайном изменении его состояния. Воздействие внешней среды на объект управления называют возмущающим воздействием.
Поведение любой системы управления определяется целью управления, характером возмущающих воздействий, а также свойствами объекта управления и управляющего органа.
Для формализации задачи управления введено ряд определений. Предположим, что вся доступная информация о поведении объекта управления содержится в n функциях времени yi(t) , i = l,2,...,n ( или i =l,n) .Будем рассматривать переменные уi =yi(t) как компоненты многомерной векторной функции y(t)=[y1(t),...,yn(t)], называемой вектором состояния объекта управления.
В системе управления переменные уi являются контролируемыми выходными переменными объекта управления и одновременно входными переменными управляющего органа (рис. 2.1).
Состояние объекта управления изменяется под действием двух основных факторов.
Первый фактор - влияние возмущающих воздействий. Эти воздействия, как правило, формируются во внешней (по отношению к системе управления) среде и оказывают неконтролируемое влияние на объект управления.
Условимся характеризовать возмущающее воздействие вектор функцией f(t)=[f1(t),...,fk(t)] , называемой вектором возмущения.
Второй фактор - изменяющий вектор управления U(t), представляют собой целенаправленное влияние управляющего органа на объект управления, которое будет описываться вектор функцией U(t)=[U1(t),...,Um(t)] и называть вектором управления или управляющим воздействием.
В системе управления переменные Uj(t), j =1,m , являются входными переменными объекта управления (управляющими переменными) и одновременно выходными переменными управляющего органа.
В любой момент времени t состояние объекта управления y(t) является функцией векторов управляющего и возмущающих воздействий U(t), f(t), а также начального состояния y(t0), т.е.
y(t)=Y{U(t),f(t),y(t0)}, (2.1)
Уравнение (2.1) есть математическая модель объекта управления, описывающая закон era Функционирования. Единственный фактор, который целенаправленно может изменять в процессе управления - это вектор управления U(t).
Желаемое состояние объекта управления не всегда бывает заранее известно. Поэтому задача управления формулируется следующим образом:
Найти такие вектор управления U(t) и вектор состояния y(t), которые обеспечивают достижение цели управления.
Цель управления может иметь различную формулировку, однако в большинстве случаев формально ее можно определить значением j некоторого функционала J, который называют показателем цели управления или критерием управления:
j=J{y(t),f(t),U(t)}. (2.2)
В реальных объектах управления изменение вектора состояния и вектора управления может происходить лишь в определенной конечной области значений, что формально представляет систему следующих ограничений:
U(t) ÎA(t); y(t) Î B(t). (2.3)
Здесь A(t) и B(t) - замкнутые области соответственно векторного пространства управлений и векторного пространства состояний.
Дата добавления: 2016-11-28; просмотров: 1301;