Представить методику проектирования устройств логического управления на примере СУ приводом главного движения сверлильного станка.
Устройство логического управления используются для непосредственного управления объектами, и могут применятся для решения задач управления более высокого уровня иерархии.
Существующие методы проектирования устройств логического управления недостаточно эффективны, т.к неформализован выбор переменных состояния модели устройств.
Предлагаемая методика проектирования устройств основано на представления объекта управления двумя конечными автоматами Мура и перечисления состояний модели устройства управления ч/з состояния модели объекта
Рассмотрим методику на примере моделирования привода головного движения сверлильного станка.

На рис. изображены положения шпинделя сверлильного станка 1-исходное состояние ; 2-состояние перехода на рабочую подачу ; 3-состояние отвода в исходную точку. a,b,c-сигналы датчиков положения (обратной связи).
Из положения 1 в 2 движение холостого хода, из положения 2 в 3 рабочая подача, а из 3 в 1-быстрый отвод в исходную позицию. Обозначим S1- положение объекта в точке 1, S2-положение объекта в точке 2, S3-положение объекта в точке 3.
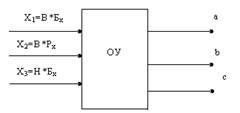
Выходные сигналы a,b,c соответствуют состояниям S1,S2,S3.Будем считать, что привод шпинделя состоит из двигателя, вращающегося вперед (В) и назад (Н) и двух муфт рабочего хода РХ и быстрого хода БХ.
Используя представления о конечном автомате, Мура составим граф переходов конечного автомата как модель поведения объекта.

Конечный автомат удобней всего представлять в виде 2-х таблиц: таблица функции выходов и таблица функции переходов. Конъюнкции сигналов управления двигателем и муфтами обозначим, как соответствующие выходные сигналы.
Функции выходов
<X,S,Y,fперех.,fвых.>-конечный автомат
Si+1=φперех(si,xi);
Yi=fвых(si,xi)- автомат Мура (не зависит от входных сигналов)
| X1 | X2 | X3 | |
| s/1 | Yi=a | Yi=a | Yi=a |
| s/2 | Yi=b | Yi=b | Yi=b |
| s/3 | Yi=b | Yi=b | Yi=b |
Функция переходов
| X1 | X2 | X3 | |
| s/1 | S2i+1 | S1i+1 | S1i+1 |
| s/2 | S2i+1 | S3i+1 | S1i+1 |
| s/3 | S3i+1 | S1i+1 | S1i+1 |
Таблицы функций получены на основе анализа поведения объекта. Табличное представление функции переходов дает точное описание поведения объекта.
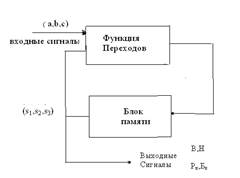
Представим модель поведения в виде ‘черного ящика’.
Модель поведения объекта является основанием для разработки модели устройства управления, при этом систему управления представим как взаимодействие 2-х моделей : модели УУ, модели ОУ.
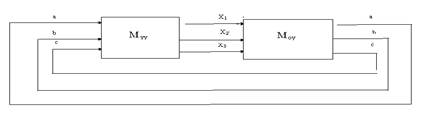
Такое представление дает возможность однозначно определить входные и выходные переменные модели УУ, а между внутренними состояниями модели ОУ, устойчивое состояние модели устройства S1 соответствуют переходом объекта из одного состояния в др.
Моделирование УУ будем производить в виде конечного автомата мура. Таблицу выходов изображать не будем, отметим только, что выходные сигналы формируются следующим образом :
В=S1+S2
H=S3
Бх=S1+S2
Рх=S2
Функции переходов
| a | b | c | |
| s/1 | S1i+1 | S2i+1 | S1i+1 |
| s/2 | S2i+1 | S2i+1 | S3i+1 |
| s/3 | S1i+1 | S3i+1 | S3i+1 |
На основание таблицы составим функции перехода в каждое последующее состояние.
S1i+1= S/1(a+c)+Si3a
(*)S2i+1=Si2(a+b)+Si1b
S3i+1=Si3(b+c)+ Si2c
Полученные функции описывают условия перехода(сохранение состояния в зависимости от комбинации входных сигналов). Они лежат в основе комбинационной схемы функции переходов конечного автомата Мура.
Методика синтеза представляется так:
- Оред-ся дискретное состояние объекта.
- Опред-ся входные сигналы, как сигналы, характеризующие дискретное состояние.
- Опред-ся входные сигналы, как сигналы, воздействующие на объект при изменение его состояния.
- Выбирается класс автомата (в данном случае автомат Мура) моделирующего поведение объекта.
- Описывается поведение автомата таблицами функций выходов и переходов, а также направленным графом.
- Выбираем автомат Мура, как модель поведения УУ.
- Устанавливается соответствие между переменными модели объекта управления и модели устройства управления.
- Составляются таблицы функции переходов.
- Составляются таблицы или аналитические выражения формирования реальных выходных сигналов.
- По таблице функции переходов получаются аналитические выражения, описывающие каждый последующий переход.
- По аналитическим выражениям синтезируются функции переходов, как комбинационная схема. При необходимости исходное выражение минимизируется.
- Синтезируется память схемы управления(выбирается тип триггера, опред-ся их кол-во)
- Синтезируются схемы синхронизации или сброс всех триггеров памяти.
Дата добавления: 2016-05-05; просмотров: 788;