Представить методику декомпозиции(разбиение) целей управления технологическим объектом.
Определяем цель управления как желаемое состояние объекта управления(ОУ), достигаемое в процессе управления за конкретное время. При этом желаемое состояние ОУ необходимо связывать с результатом выполнения операций технол-го процесса., его качеством. Цели управления разбивается на подцели так же, как технологический процесс на операции.
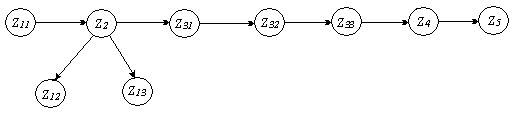
Процесс разбиения цели на подцели представляется в виде направленного графа, у которого вершины являются целями и подцелями, а логическое отношение между целями обозначаются символами у дуг графа. При этом различают логические отношения типа И(конъюнкция)и ИЛИ(дизъюнкция).

Для графа, изображенного на рисунке, характерно отношение между 1и 2 подцелями, выраженное функцией ИЛИ. Это означает, что достижение 1 или 2 подцели приводит к достижению цели верхнего уровня. В этом графе фиксируются альтернатива выбора подцели.

Выделяем подцели, отношение между которыми подчинено функции И. при этом характерно, что достижение цели верхнего уровня возможно после достижения 3 и 4 подцелей. Построение графа цели осуществляется с выбора глобальной цели управления Z.

Производим декомпозицию (разбиение) цели на подцели, между целями одного уровня устанавливается логическое отношение, само разбиение продолжается до тех пор, пока разработчику не станет понятна возможность достижения цели(подцели).
Цели нижнего уровня являются конечными (элементарными) подцелями. Эти подцели описывают желаемую или идеальную программную траекторию. При этом подцели, объединенные по Т, представляют одну программную траекторию, по ИЛИ – другую (альтернативную) программную траекторию.
2. Основные понятия ТАУ.
Рассмотрим некоторые понятия автоматики, к ним следует отнести: управляемый объект управления; автоматическое управляющее устройство автоматической системы, воздействие, сигнал обратной связи,
Автоматика состоит из 2-хчастей:
- Теория автоматического регулирования и управления4
- технологические средства построения автоматической системы
Теория автоматического регулирование и управления-это наука о принципах построения автоматических систем и закономерностях протекающих в них процессах. Основная задача этой науки – построение при помощи инженерных методов оптимальных автомат-их систем и исследования статики и динамики этих систем.
Автоматическая система (АС)состоит из управляющего объекта (ОУ) автоматического управляющего устройства (АУУ).
УО -совокупность технологических средств (машин, аппаратов, устройств), которая нуждается в оказание воздействие из вне для достижения поставленной цели управления. К УО относятся, например прокатные станы, атомные реакторы, паровые и газовые турбины, электро генераторы и двигатели, летательные аппараты и др.
АУУ –устройство осущ-е воздействие на УО, в соответствие с заложенным в нем законом управления обычно УУ воздействует на УО через орган управления.
АС-совокупность ОУ и УУ взаимодействующих м/усобой в соответствие с законом управления.
Сигнал-обусловленное (заранее договоренное) состояние или изменение состояния представляющий параметра отображения информации которая содержится в воздействии. Обычно сигнал выражается независимой математической функцией.
ВОЗДЕЙСТВИЕ-взаимодействие м/у автоматической средой и внешней средой.
4. Роботизированные технологические комплекс. Их место в автоматизации производственных процессов.
РТК- совокупность единицы технологического оборудования промышленного робота (ПР) и средств оснащения, автономно функционирующая и осуществляющая многократный цикл . ПР – перепрограммированный автоматизированный манипулятор промышленного применения. Для ПР характерно автоматическое управление, способность к быстрому и относительно легкому перепрограммированию , способность к выполнению трудовых действий. Роботы принципиально отличаются от известных ранее традиционных средств автоматизации своей универсальностью и гибкостью в отношении возможности быстро перехода на выполнение новых операции. Работая в составе РТК роботы выполняют следующие операции : загрузку и разгрузку станка , смену инструмента, уборку стружки, взаимодействие с конвейером, складом заготовок и готовой продукции и т. д. ПР могут выполнять и непосредственно производственные операции (н-р покраска краскопультом). РТК могут работать в составе гибких производственных систем. Для этого они должны автоматизированную переналадку и возможность встраивать в систему. ГПС и РТК явл. эффективным путем резкого сокращения ожидания повышения производительности тех. Процесса. При этом обеспечивается работа производства при значительном сокращение персонала, возрастает коэффициент использования станков РТК для обработки деталей типа тел вращения в серийном и мелкосерийном производстве. Станочные системы различных видов включающих одну или более единицу технологического оборудования при наличие в их составе промышленных роботов принято называть роботизированными комплексами. По виду механического процесса РТК могут быть для механообработки , холодной штамповки, ковки, литья, прессования пластмасса, термической обработки, сварки, сборки, контроля, испытания. Расположение промышленных роботов в составе РТК может быть следующим : Тактовый стол 5 подает заготовку на фиксированную позицию. Промышленный робот встроенный в конструкцию станка 2 снимает заготовку и подает в зону станка. После обработки готовая деталь снимается роботом и подается на ту же позицию тактового стола. Затем СУ ПР подает сигнал на тактовый стол на одну позицию (один шаг).
3. Структурная схема состоит из пяти блоков, соединенных последовательно.
Значения надежности (т. е. вероятности безотказной работы) отдельных блоков соответственно будут:
Р1=е-λ1t; Р2=е-λ2t; Р3=е-λ3t; Р4=е-λ4t; Р5=е-λ5t;
Где
Λ1 = 2* 10-5 1/ч;
Λ2 = 3* 10-5 1/ч;
Λ3 = 1,5* 10-5 1/ч;
Λ4 = 10* 10-5 1/ч;
Λ5 = 1* 10-5 1/ч;
| <== предыдущая лекция | | | следующая лекция ==> |
| Гомологический ряд: CH4 – метан, C2H6 – этан, C3H8 – пропан, C4H10 – бутан, и т.д. | | | Химические свойства. |
Дата добавления: 2016-05-05; просмотров: 732;